На сегодняшний день актуальна тема электробезопасности оперативного персонала при оперативных переключениях разъединителей, оборудованных ручными приводами. В статье описано разработанное переносное устройство, позволяющее осуществлять дистанционное переключение разъединителей с ручными приводами.
Акуличев В.О., заместитель генерального директора по цифровой трансформации ПАО «Россети Центр»
Микрюков В.В., руководитель дирекции по инновационной деятельности и импортозамещению ПАО «Россети Центр»
Доронин С.Н., инженер АО «РКБ «Глобус»
Доронин В.Н., инженер АО «РКБ «Глобус»
Соболев Н.Е., ведущий инженер АО «РКБ «Глобус»
Оперирование высоковольтными разъединителями осуществляется при помощи приводов, которые подразделяются на ручные и двигательные. Разъединители, оборудованные ручными приводами, требуют больших усилий при проведении ручного оперирования и обладают меньшей безопасностью, поскольку при осуществлении оперативных переключений существует опасность падения колонок изоляторов, что приводит к возникновению электродугового разряда. Использование двигательных приводов позволяет обеспечить безопасное обслуживание высоковольтных разъединителей, поскольку оперирование таких приводов осуществляется дистанционно. Однако в известных двигательных приводах не предусмотрена возможность оперативного применения с другими высоковольтными разъединителями, поскольку они требуют внутренней установки в конструкции разъединителя и питания от стационарной электросети. Также их невозможно применять с высоковольтными разъединителями, оборудованными ручными приводами, без отключения штатного ручного привода и механизмов блокировки и сигнализации.
С целью преодоления указанных ограничений ПАО «Россети Центр» (управляющей организации ПАО «Россети Центр и Приволжье») инициировало реализацию НИОКР по разработке роботизированного привода «Щит», позволяющего дистанционно осуществлять двигательное оперирование главными ножами разъединителей 35–110 кВ, оборудованных ручными приводами.

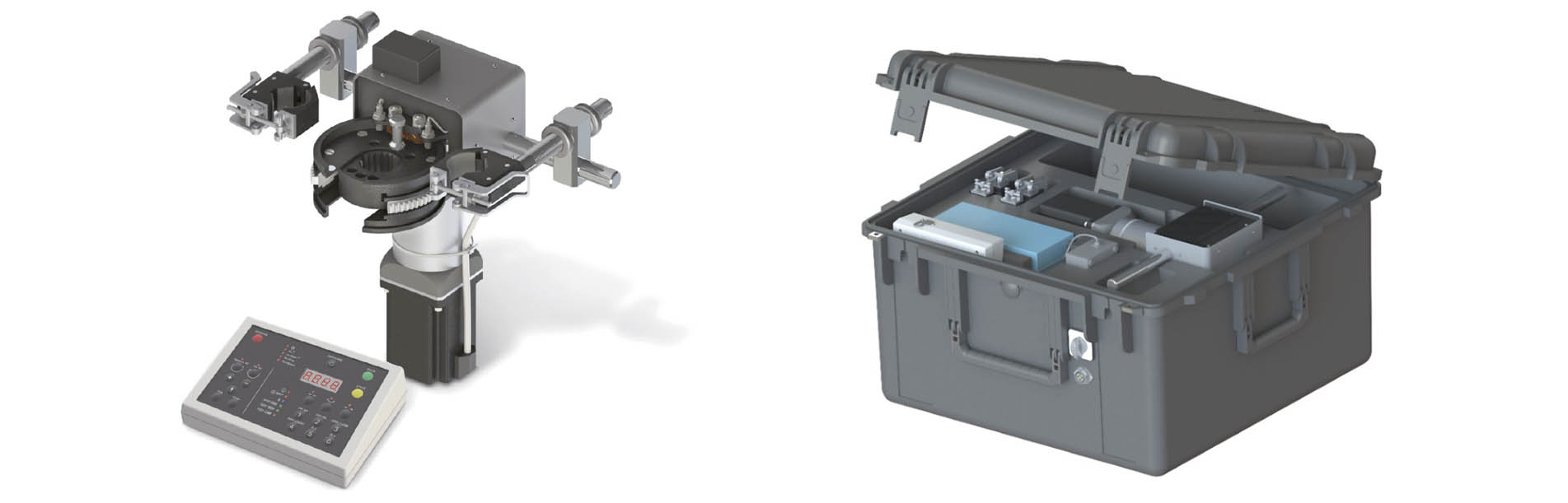
Конструктивно роботизированный привод «Щит» выполнен в виде переносного устройства, внешний вид которого представлен на рисунке 1. Устройство содержит бесколлекторный двигатель и двухступенчатый редуктор, которые в совокупности обеспечивают номинальный крутящий момент, равный 400 Н∙м. Роботизированный привод также состоит из драйвера бесколлекторного двигателя и плат управления, индикации и связи. Платы управления и индикации объединяют и координируют работу различных датчиков, формируют сигналы управления, а также сигнализируют о текущем состояния привода. Плата связи содержит модуль беспроводной передачи данных и предназначена для формирования канала связи и последующего обмена данными с внешним пультом управления. Удаленное оперирование высоковольтными разъединителями осуществляется при помощи пульта дистанционного управления (рисунок 1), с помощью которого осуществляется программное управление скоростью поворота в зависимости от текущего угла поворота и крутящего момента с функцией задания пользовательских профилей. Автономное электропитание роботизированного привода «Щит» реализуется при помощи внешней АКБ с возможностью ее быстрой замены. Для заряда АКБ предусмотрено зарядное устройство, подключаемое к однофазной сети переменного тока или к бортовой сети 12 В или 24 В. В таблице 1 представлена информация по основным техническим характеристикам роботизированного привода «Щит».

Принцип работы роботизированного привода «Щит» состоит в передаче крутящего момента от электромеханизма на хомут, закрепленный на валу главных ножей разъединителя, с помощью установленной на хомуте и зафиксированной шкворнем муфты. Точкой опоры роботизированного привода являются валы заземляющих ножей высоковольтного разъединителя, на которые устанавливаются зажимы, жестко фиксирующие корпус устройства, при этом способ установки предполагает наличие минимум одного такого вала.
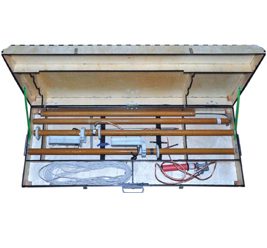
Для транспортировки роботизированного привода «Щит» предусмотрен кейс, внешний вид которого представлен на рисунке 2. Дополнительно кейс комплектуется пультом дистанционного управления, хомутами (под разные диаметры валов), АКБ, зарядным устройством, преобразователями питания зарядного устройства от бортовой сети 12 В/24 В, соединительным кабелем (для подвода питания от АКБ к приводу) и приспособлениями для снятия механических блокировок ручных приводов.
Успешная опытно-промышленная эксплуатация, проведенная в 2022 году на подстанциях филиала ПАО «Россети Центр и Приволжье» — «Рязаньэнерго», подтвердила целесообразность и эффективность применения таких устройств для выполнения операций по переключению высоковольтных разъединителей 35–110 кВ. Внешний вид ручного привода с установленным на нем устройством приведен на рисунке 3.

Рис. 2. Внешний вид транспортировочного кейса 
Рис. 3. Внешний вид ручного привода ПРГ-01-5УХЛ1 с установленным на его валы роботизированным приводом «Щит»
Таким образом, применение разработанного роботизированного привода позволяет повысить безопасность и оперативность работы персонала, осуществляющего оперирование разъединителями, оборудованными ручными приводами. ![]()