98
Точное определение места
короткого замыкания
на транзитных ВЛ 110 кВ
по двум регистраторам
аварийных событий
Пчела
А
.
В
.,
заместитель
начальника
СРЗА
Западного
ПО
филиала
ПАО
«
МРСК
Волги
» —
«
Оренбургэнерго
»
На
данный
момент
существует
множество
методов
определения
места
повреж
-
дения
на
воздушных
линиях
.
В
настоящей
статье
кратко
описываются
наиболее
используемые
методы
и
более
подробно
рассматривается
определение
места
короткого
замыкания
на
транзитных
ВЛ
110
кВ
по
двум
регистраторам
аварий
-
ных
событий
.
ВВЕДЕНИЕ
Существующие
методы
определе
-
ния
места
повреждения
(
ОМП
)
на
воздушных
линиях
(
ВЛ
),
их
поло
-
жительные
и
отрицательные
сто
-
роны
представлены
на
рисунке
1.
Наиболее
распространенные
из
них
:
топографический
,
импульс
-
ный
,
двусторонний
по
регистра
-
тору
аварийных
событий
(
РАС
)
и
односторонний
по
РАС
.
Топографическое
определе
-
ние
места
повреждения
являет
-
ся
достаточно
точным
,
точность
напрямую
зависит
от
количества
первичных
датчиков
тока
.
Для
построения
полноценного
ком
-
плекса
ОМП
необходимы
значи
-
тельные
первоначальные
финан
-
совые
вложения
,
а
также
затраты
на
последующую
эксплуатацию
:
замена
аккумуляторных
бата
-
р
е
л
е
й
н
а
я
з
а
щ
и
та
и
а
в
т
о
м
а
т
и
к
а
релейная защит
а и автома
тика
Дистанционные
Топографические
Стоячих
волн
Высокочастотные
Низкочастотные
Петлевые
Емкостные
По
параметрам
аварийного
режима
Индукционные
Электро
-
механические
Акустические
Потенциальные
Импульсные
Односторонние
Односторонние
Двухсторонние
Двухсторонние
Локационные
Волновые
Рис
. 1.
Существующие
методы
ОМП
на
ЛЭП
99
рей
(
АБ
),
обслуживание
каналов
связи
.
Кроме
того
,
для
определе
-
ния
сработавших
датчиков
(
если
они
не
имеют
каналов
связи
)
не
-
обходимо
потратить
значительное
время
для
объезда
ВЛ
и
жела
-
тельно
определить
место
повреж
-
дения
дистанционным
методом
.
Импульсное
определение
ме
-
ста
повреждения
дает
более
точ
-
ные
результаты
по
сравнению
с
методами
определения
мест
по
-
вреждения
ВЛ
по
ПАР
,
однако
тре
-
бует
значительно
больших
капи
-
тальных
вложений
и
экономически
менее
выгоден
.
А
также
импульс
-
ный
метод
ОМП
малоэффективен
на
неоднородных
ВЛ
,
так
как
име
-
ют
место
«
паразитные
»
отражения
импульсов
.
Двухстороннее
определение
места
повреждения
по
регистра
-
тору
аварийных
событий
(
РАС
)
обладает
высокой
точностью
,
но
требует
значительных
капиталь
-
ных
вложений
,
в
том
числе
и
вло
-
жений
в
технические
мероприятия
по
синхронизации
сигналов
.
На
транзитных
ВЛ
с
длинными
от
-
пайками
расчетное
место
опреде
-
ляется
до
отпайки
.
Точность
огра
-
ничена
суммарной
погрешностью
измерительных
трансформаторов
тока
(
ТТ
)
и
трансформаторов
на
-
пряжения
(
ТН
).
Одностороннее
определение
места
поврежедения
по
РАС
об
-
ладает
повышенной
методической
погрешностью
,
обусловленной
на
-
личием
неизвестной
информации
,
к
которой
относятся
значение
пе
-
реходного
сопротивления
в
месте
повреждения
и
данные
о
параме
-
трах
режима
на
противоположном
конце
линии
.
Точность
ограничена
суммарной
погрешностью
измери
-
тельных
ТТ
и
ТН
[1].
ДИСТАНЦИОННЫЙ
МЕТОД
Дистанционный
метод
определе
-
ния
места
повреждения
использу
-
ет
модель
линии
электропередачи
.
Место
повреждения
определяется
путем
подстановки
в
формульные
выражения
величин
токов
и
напря
-
жений
аварийного
режима
и
пара
-
метров
ЛЭП
.
При
использовании
одностороннего
замера
каждому
виду
замыкания
соответствует
свое
расчетное
выражение
.
Основные
факторы
,
определя
-
ющие
точность
ОМП
:
–
использование
односторонне
-
го
(2–3 %)
или
двухстороннего
(0,3–1 %)
замеров
;
–
инструментальная
погрешность
измерительного
оборудования
может
быть
частично
устране
-
на
программными
средствами
обработки
сигнала
;
–
адекватность
модели
реаль
-
ному
объекту
достигается
со
-
вместной
работой
заказчика
и
разработчика
и
уточняет
-
ся
в
процессе
эксплуатации
ОМП
.
ОДНОСТОРОННИЕ
МЕТОДЫ
ОМП
Односторонние
методы
ОМП
по
-
зволяют
определять
расстояние
до
места
повреждения
без
пере
-
дачи
информации
с
другого
кон
-
ца
линии
,
что
является
их
суще
-
ственным
преимуществом
перед
двусторонними
методами
.
К
достоинствам
односторонних
методов
также
относится
возмож
-
ность
определения
места
КЗ
при
всех
его
видах
и
достаточность
установки
фиксирующего
прибора
только
на
одном
из
концов
ВЛ
.
Общим
недостатком
этих
ме
-
тодов
является
повышенная
по
-
грешность
ОМП
по
сравнению
с
двусторонними
методами
,
кото
-
рая
обусловлена
:
–
необходимостью
моделирова
-
ния
переходного
сопротивле
-
ния
в
месте
повреждения
;
–
приближенным
учетом
пара
-
метров
источника
питания
на
ненаблюдаемом
конце
линии
;
–
осложнениями
ОМП
на
линиях
с
ответвлениями
.
Необходимо
сказать
,
что
точ
-
ность
одностороннего
ОМП
ниже
,
чем
двухстороннего
.
Кроме
того
,
одностороннее
ОМП
требует
значительно
более
детального
задания
параметров
ВЛ
,
учета
параллельных
линий
и
режима
за
-
земления
грозозащитного
троса
,
задания
эквивалентных
сопротив
-
лений
систем
и
эквивалентной
глу
-
бины
возврата
тока
в
земле
и
т
.
д
.
ДВУХСТОРОННИЙ
МЕТОД
ОМП
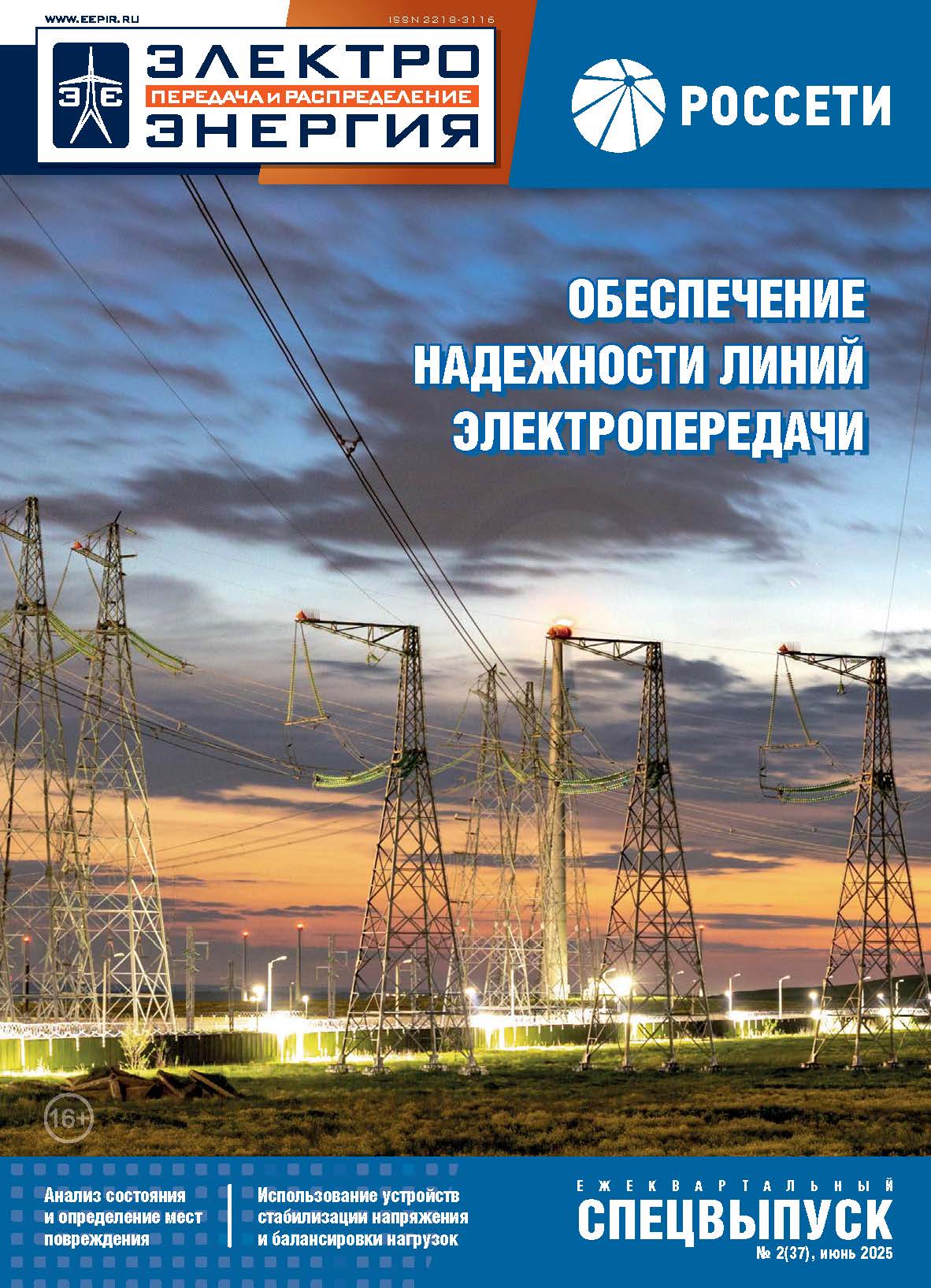
Для
организации
ОМП
методом
двухстороннего
замера
требуется
два
устройства
,
установленные
по
концам
линии
,
на
которые
за
-
ведены
соответствующие
токи
и
напряжения
и
канал
связи
(
рису
-
нок
2).
В
качестве
последнего
мо
-
жет
быть
использован
любой
вид
передачи
цифровой
информации
,
обеспечивающий
скорость
пере
-
дачи
от
50
до
230 400
бит
/
с
,
на
-
пример
,
связь
через
GSM-
модемы
(
рисунок
3)
или
через
современ
-
Рис
. 2.
Общая
схема
организации
двухстороннего
ОМП
U
U
Терминал
ОМП
Терминал
ОМП
I
ведомый
ведущий
I
ПС1
ПС2
ТТ
ТТ
ТН
ТН
Адаптер
RS-232
GSM-
модем
RS-485/RS-232
Канал связи
GSM-
модем
RS-232
Адаптер
RS-485/RS-232
Терминал
ОМП
Терминал
ОМП
ведомый
ведущий
I
Л2
U
ПС1
ПС2
ТТ2
ТН
ТТ2
ТТ1
ТТ1
U
ТН
I
Л2
I
Л1
I
Л1
Рис
. 3.
Организация
двухстороннего
ОМП
с
помощью
GSM-
модема
№
3 (42) 2017
100
ные
приемопередатчики
ВЧ
-
связи
с
функцией
«
прозрачного
бит
-
канала
».
При
возникновении
аварии
на
контролируемой
линии
происхо
-
дит
пуск
обоих
устройств
(
терми
-
налов
):
ведущего
и
ведомого
(
ри
-
сунок
4).
После
фильтрации
,
об
-
работки
и
сжатия
информации
о
параметрах
предаварийного
и
аварийного
режимов
в
каждом
терминале
формируется
ком
-
пактный
информационный
файл
(
около
1
Кб
).
Далее
ведущий
терминал
запрашивает
данный
файл
у
ведомого
и
,
соответствен
-
но
,
пересылает
ему
свой
.
На
ос
-
новании
полученной
с
противо
-
положного
конца
инфор
мации
каждый
терминал
определяет
место
повреждения
от
«
сво
-
ей
»
ПС
.
Если
связь
между
терми
-
налами
ОМП
оказалась
повреж
-
дена
или
недоступна
,
то
терми
-
налы
автоматически
переходят
в
режим
расчета
одностороннего
ОМП
.
В
зависимости
от
реализован
-
ной
в
терминале
функции
ОМП
время
,
необходимое
для
опреде
-
ления
места
повреждения
,
может
варьироваться
.
При
односторон
-
нем
замере
оно
не
превышает
одной
секунды
,
а
при
двухсто
-
роннем
определяется
скоростью
передачи
данных
по
каналу
связи
и
не
превышает
120
секунд
.
Алгоритм
должен
учитывать
не
однородность
линии
,
ответвле
-
ния
и
не
требовать
расчета
эк
-
вивалентных
сопротивлений
си
-
стем
,
учета
параллельных
линий
,
режима
заземления
грозозащит
-
ного
троса
и
т
.
д
.
1.
Разбиение
ЛЭП
на
участки
од
-
нородности
—
основная
проце
-
дура
формирования
модели
,
от
которой
зависит
точность
ОМП
(
под
участком
однород
-
ности
понимается
отрезок
ли
-
нии
,
на
протяжении
которого
параметры
ЛЭП
остаются
не
-
изменными
).
Разбиение
про
-
водится
по
следующим
при
-
знакам
:
–
тип
проводов
;
–
тип
опор
;
–
тип
и
режим
заземления
грозозащитных
тросов
;
–
наличие
ответвительных
подстанций
;
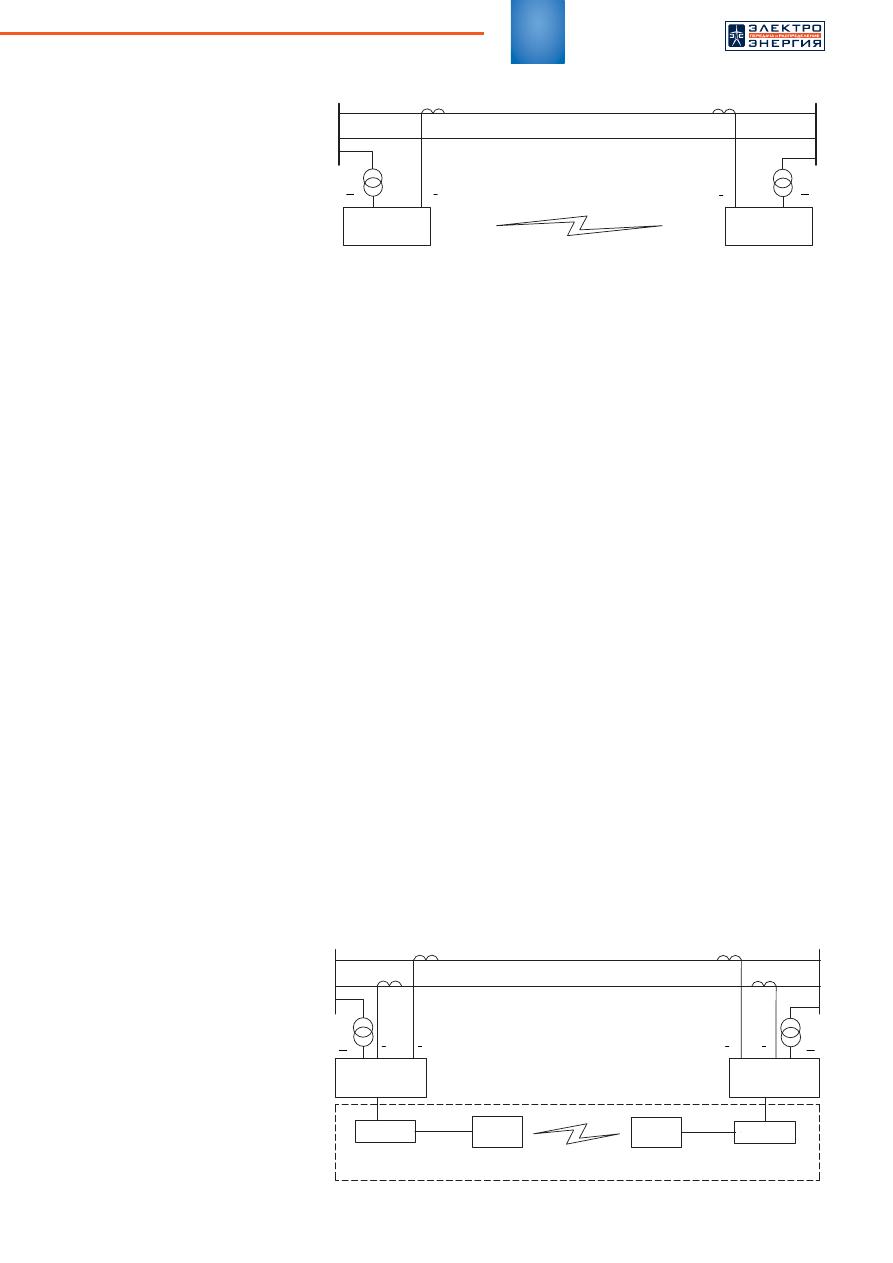
Рис
. 4.
Пересчет
в
место
предполагаемого
повреждения
U
S
I
S
Терминал
ОМП
U
r
I
r
Û
f
1
Û
f
2
Z
л
·
x
f
0
Z
л
· (
L
–
x
f
)
0
–
наличие
параллельных
ли
-
ний
.
2.
Эквивалентные
системы
по
концам
ЛЭП
:
–
сопротивления
прямой
и
ну
-
левой
последовательности
.
3.
Ответвительные
подстанции
:
–
параметры
линии
до
под
-
станции
;
–
тип
трансформаторов
;
–
мощность
нагрузки
.
4.
Обходная
связь
:
–
сопротивления
прямой
и
ну
-
левой
последовательнос
-
ти
[3].
ИМПУЛЬСНЫЕ
МЕТОДЫ
:
ЛОКАЦИОННЫЙ
И
ВОЛНОВОЙ
Локационный
метод
основан
на
подаче
зондирующего
импульса
в
линию
,
где
после
получения
отраженного
сигнала
от
любой
неоднородности
в
линии
(
в
на
-
шем
случае
нас
интересует
за
-
мыкание
на
землю
или
соседнюю
фазу
)
мы
получаем
время
прихо
-
да
отраженного
сигнала
,
и
путем
несложных
вычислений
опреде
-
ляется
расстояние
до
поврежде
-
ния
в
ней
.
К
основным
недостаткам
можно
отнести
относительную
сложность
реализации
данного
метода
для
линий
высокого
на
-
пряжения
:
–
необходимость
установки
кон
-
денсатора
связи
или
трансфор
-
матора
напряжения
,
фильтра
присоединения
,
электронного
ос
циллографа
,
достаточно
мощного
генератора
и
блока
управления
системы
с
соот
-
ветствующим
программным
обеспечением
;
–
необходимость
постоянной
от
-
стройки
от
множества
неодно
-
родностей
в
линии
(
перехо
-
ды
,
расплетения
,
частичные
разряды
,
муфты
,
ВЧ
-
переходы
и
т
.
д
.);
–
зависимость
длины
воздушной
линии
от
температуры
окру
-
жающей
среды
(
данная
зави
-
симость
незначительна
,
но
ее
также
необходимо
учитывать
при
расчете
места
поврежде
-
ния
);
–
достаточно
сильное
затухание
зондирующего
сигнала
в
воз
-
душной
линии
при
появлении
на
поверхности
провода
голо
-
ледных
отложений
(
в
связи
с
этим
данный
метод
исполь
-
зуется
для
определения
голо
-
ледных
отложений
на
про
-
водах
воздушной
линии
,
но
и
здесь
проявляется
следую
-
щий
недостаток
—
невозмож
-
ность
точ
ного
определения
места
и
величины
гололедно
-
го
отложения
;
здесь
он
может
использоваться
,
только
как
индикатор
появления
голо
-
ледного
отложения
на
ВЛ
).
К
достоинствам
можно
отне
-
сти
только
точность
определе
-
ния
места
повреждения
,
но
вкупе
с
вышеизложенными
недостатка
-
ми
этот
метод
не
получил
широ
-
кого
распространения
.
Волновой
метод
основан
на
фиксации
времени
прихода
на
измерительные
приборы
при
по
-
вреждении
ВЛ
начала
высокоча
-
стотного
импульса
переходного
процесса
(
фронта
волны
),
и
на
основе
вычисления
разницы
вре
-
мени
по
следующей
формуле
происходит
определение
места
повреждения
:
L
б
=
L
общ
/2 +
·
t
/2,
где
L
б
—
расстояние
от
ближнего
конца
линии
;
L
общ
—
длина
линии
;
—
скорость
распространения
волны
в
линии
(
чуть
меньше
ско
-
РЕЛЕЙНАЯ ЗАЩИТА
И АВТОМАТИКА

101
рости
света
,
но
снижается
при
наличии
атмосферных
отложе
-
ний
на
линии
);
t
—
разновре
-
менность
импульсов
по
концам
линии
.
К
основным
недостаткам
можно
отнести
относительную
сложность
реализации
данного
метода
для
линий
высокого
на
-
пряжения
:
–
необходимость
установки
кон
-
денсаторов
связи
или
транс
-
форматоров
напряжения
,
или
иных
датчиков
,
подключа
-
емых
например
,
на
ПИНы
высоковольтных
вводов
,
фильтра
присоединения
,
электронного
осциллографа
,
блоков
управления
системы
,
установленных
по
концам
линии
с
соответствующей
связью
между
собой
и
соот
-
ветствующим
программным
обеспечением
;
–
необходимость
постоянной
от
-
стройки
от
множества
помех
окружающей
сети
(
КЗ
вблизи
идущих
линий
и
удары
молнии
в
непосредственной
близости
,
но
не
в
саму
линию
,
частичные
разряды
на
коротких
линиях
(
на
длинных
они
затухают
и
не
доходят
до
концов
линии
),
переходы
,
расплетения
,
час
-
тичные
разряды
,
муфты
,
ВЧ
переходы
и
т
.
д
.);
–
зависимость
длины
воздуш
-
ной
линии
от
температуры
окружающей
среды
(
данная
зависимость
незначитель
-
на
,
но
ее
также
необходимо
учитывать
при
расчете
места
повреждения
);
–
множественные
излишние
показания
системы
при
ударе
молнии
в
линию
(
опору
).
Даже
при
ударе
молнии
в
опору
,
вследствие
огромной
мощ
-
ности
заряда
,
довольно
часто
происходит
мгновенное
уве
-
личение
потенциала
земли
вокруг
опоры
(
заземлителя
)
и
разряды
с
тела
опоры
про
-
биваются
на
провода
линии
—
«
обратное
перекрытие
».
Удар
молнии
очень
скоротечен
,
но
вследствие
«
обратного
пере
-
крытия
»
включенная
линия
сама
начинает
поддерживать
дугу
.
В
результате
сверхвы
-
сокого
напряжения
на
линии
происходят
множественные
перекрытия
изоляции
и
(
или
)
частичные
разряды
большой
мощности
на
данном
участке
линии
,
а
также
приборы
систе
-
мы
фиксируют
множествен
-
ные
отраженные
от
концов
линии
импульсы
достаточной
мощностии
одинаковой
фор
-
мы
.
Системаих
идентифи
-
цирует
(
по
формеимпульса
)
и
принимает
как
достоверные
.
В
результате
имеемна
малом
промежутке
временимноже
-
ственные
показания
повреж
-
дений
на
различных
участках
линии
.
В
некоторых
случа
ях
данные
эффекты
могут
воз
-
никать
и
при
обычном
дуго
-
вом
КЗ
.
К
достоинствам
можно
отне
-
сти
только
точность
определе
-
ния
места
повреждения
,
но
вкупе
с
вышеизложенными
недостатка
-
ми
этот
метод
не
получил
широ
-
кого
распространения
.
ТОПОГРАФИЧЕСКИЙ
МЕТОД
Топографический
метод
разби
-
вается
на
индукционный
и
элек
-
тромеханический
.
Индукционный
датчик
«
чувствует
»
ток
,
протека
-
ющий
по
линии
,
и
соответствен
-
но
может
использоваться
для
определения
места
однофазно
-
го
замыкания
на
землю
в
сети
с
изолированной
нейтралью
,
либо
при
использовании
гене
-
ратора
тока
на
полностью
выве
-
денной
,
но
заземленной
только
в
одной
точке
линии
.
Электроме
-
ханический
метод
основан
на
из
-
мерении
тока
непосредственно
на
проводах
самой
линии
.
Он
не
получил
распространения
в
свя
-
зи
с
практически
отсутствием
оперативности
определения
ме
-
ста
повреждения
.
Необходимо
непосредственно
об
ходить
ли
-
нию
—
осматривать
и
взводить
блинкеры
.
Современным
продолжени
-
ем
электромеханического
ме
-
тода
является
использование
микро
электронных
датчиков
,
крепящихся
непосредственно
на
провода
линии
.
Он
применим
только
на
линиях
с
односторон
-
ним
питанием
и
показывает
ме
-
сто
повреждения
от
последнего
сработавшего
датчика
линии
,
соответственно
,
до
следующе
-
го
несработавшего
.
Этот
метод
наиболее
точен
,
но
занимает
значительное
время
при
ис
-
пользовании
только
визуальной
связи
(
мигающие
светодиоды
)
и
значительно
более
затратен
при
условии
передачи
информа
-
ции
по
каналам
связи
(
посред
-
ством
GSM-
модема
в
каждом
датчике
или
установки
специ
-
ального
шкафа
,
собирающего
информацию
с
ближайших
дат
-
чиков
по
радиоканалам
и
пере
-
дающего
ее
по
другим
каналам
связи
в
диспетчерский
центр
).
В
данном
случае
,
появляют
-
ся
дополнительные
затраты
на
связь
и
возникают
повышенные
требования
к
источникам
пита
-
ния
.
А
при
необходимости
доста
-
точно
точной
локализации
места
повреждения
количество
датчи
-
ков
должно
быть
значительно
большим
и
данные
затраты
ста
-
новятся
просто
недопустимыми
.
ПОВЫШЕНИЕ
ТОЧНОСТИ
ОМП
Давайте
рассмотрим
возмож
-
ностьорганизации
определения
места
повреждения
на
линии
с
двусторонним
питанием
с
по
-
мощью
двух
микропроцессорных
устройств
РЗиА
,
установленных
с
обеих
сторон
линии
.
Практиче
-
ски
все
современные
защиты
ВЛ
110–500
кВ
на
микропроцессорной
базе
имеют
в
своем
составе
кроме
измерительных
органов
тока
из
-
мерительные
органы
напряжения
,
орган
связи
и
довольно
часто
они
уже
подключены
посредством
мо
-
демной
или
проводной
(
оптоволо
-
конной
)
линии
связи
к
серверу
или
какому
-
то
конечному
автоматизи
-
рованному
рабочему
месту
,
име
-
ют
достаточный
вычислительный
ресурс
(
то
есть
,
другими
словами
,
имеют
весь
необходимый
аппарат
-
ный
ресурс
).
Также
данные
микро
-
процессорных
устройств
(
МПУ
)
зачастую
уже
имеют
в
своем
функ
-
ционале
ОМП
,
действующее
по
методу
одностороннего
замера
.
Получается
,
что
для
реализа
-
ции
нужного
нам
гораздо
более
точного
двухстороннего
ОМП
не
-
обходима
только
доработка
про
-
граммного
обеспечения
.
№
3 (42) 2017

102
Разумеется
,
указанную
дора
-
ботку
должны
делать
сами
про
-
изводители
(
разработчики
)
дан
-
ных
МПУ
РЗиА
.
В
качестве
рекомендации
мож
-
но
предложить
следующее
:
–
один
из
терминалов
необходи
-
мо
назначить
«
ведущим
»,
то
есть
он
собирает
информацию
о
КЗ
(
запрашивает
у
«
ведомо
-
го
»
терминала
),
обрабатывает
и
выдает
результат
;
–
для
уменьшения
потребляе
-
мого
трафика
(
при
ис
поль
зо
-
ва
нии
модемной
линии
связи
)
вместо
отправки
осцилло
грам
-
мы
,
за
фиксированной
ве
до
-
мым
устройством
,
необходимо
ведущему
устройство
запраши
-
вать
значения
токов
и
напря
-
жений
в
определенный
момент
времени
;
–
обработку
информации
(
связь
,
получение
информации
,
вычис
-
ление
)
необходимо
произво
-
дить
в
период
бездействия
устройства
,
а
именно
,
после
окончания
записи
осцилло
-
граммы
и
при
отсутствии
сра
-
батывания
пусковых
органов
устройства
либо
с
контролем
загрузки
процессора
(
как
при
-
мер
:
запускать
при
загрузке
процессора
менее
50 %);
–
для
более
удобного
разбора
аварийных
случаев
оба
МПУ
должны
быть
синхронизирова
-
ны
по
времени
;
–
ведущее
устройство
для
умень
-
шения
погрешности
показаний
должно
уметь
выбрать
из
фай
-
ла
аварийного
события
макси
-
мальный
ток
КЗ
основной
гар
-
моники
,
а
в
случае
отсутствия
синхронизации
обоих
термина
-
лов
уметь
сравнить
форму
ос
-
циллограмм
на
предмет
отно
-
шения
их
к
одному
и
тому
же
КЗ
.
ВЫВОДЫ
Необходима
доработка
существу
-
ющего
программного
обеспечения
для
МПУ
РЗА
либо
разработка
но
-
вого
программного
обеспечения
ЛИТЕРАТУРА
1.
Абрамочкина
Л
.
В
.
Повышение
точ
-
ности
определения
места
повреж
-
дения
воздушных
линий
электро
-
передачи
по
параметрам
пред
ава
-
рий
но
го
и
аварийного
режимов
.
[
Текст
] :
автореф
.
дис
. ...
канд
.
техн
.
наук
: 05.14.02 /
Л
.
В
.
Абрамочкина
.
Томск
, 2014. 19
с
. :
ил
.
2.
Руководство
по
эксплуатации
терминала
определения
места
повреждения
Бреслер
-0107.090.
БРС
H.656122.090
РЭ
.
3.
Программный
комплекс
WinBres
v.3.
Руководство
пользователя
.
Научно
-
производственное
пред
-
приятие
«
Бреслер
» /
Информа
-
ционный
материал
фирмы
«
НПП
Бреслер
», 2011.
РЕЛЕЙНАЯ ЗАЩИТА
И АВТОМАТИКА
для
АРМ
,
позволяющего
осущест
-
влять
связь
и
синхронизацию
по
времени
между
МПУ
РЗиА
,
нахо
-
дящихся
на
разных
концах
линий
,
и
производить
расчет
ОМП
по
осциллограммам
,
полученным
от
МПУ
РЗиА
.
Оригинал статьи: Точное определение места короткого замыкания на транзитных ВЛ 110 кВ по двум регистраторам аварийных событий
На данный момент существует множество методов определения места повреждения на воздушных линиях. В настоящей статье кратко описываются наиболее используемые методы и более подробно рассматривается определение места короткого замыкания на транзитных ВЛ 110 кВ по двум регистраторам аварийных событий.