102
РЕЛЕЙНАЯ ЗАЩИТА
И АВТОМАТИКА
Совершенствование
дистанционных защит
при цифровой реализации
Гвоздев
Д
.
Б
.,
Первый заместитель
генерального директора —
Главный инженер
компании «Россети
Московский регион»
Грибков
М
.
А
.,
директор Департамента
релейной защиты
и режимной автоматики
электрических сетей
компании «Россети
Московский регион»
Булычев
А
.
В
.,
технический директор
ООО «НПП Бреслер»
Козлов
В
.
Н
.,
главный конструктор
ООО «НПП Бреслер»
Бычков
Ю
.
В
.,
заведующий сектором
основных защит линий
ООО «НПП Бреслер»
Ш
ироко известны спосо-
бы и устройства дистан-
ционной защиты (ДЗ),
в которых расстояние до
места повреждения определяется
с помощью реле сопротивления по
косвенному принципу – изменению
сопротивления контура короткого за-
мыкания, вычисляемого по сигналам
трансформаторов тока и трансфор-
маторов напряжения [1]. Устройство
защиты формирует команду на отклю-
чение линии при попадании вектора
сопротивления в определенную зону
(область характеристики срабатыва-
ния) на комплексной плоскости с со-
ответствующей выдержкой времени
срабатывания.
Данный подход предполагает ста-
ционарность контролируемого режи-
ма, и потому в условиях переходных
процессов погрешность определения
удаленности замыкания значительно
возрастает.
Кроме этого, вектор измеренного
сопротивления может попадать в зону
срабатывания дистанционной защиты
при некоторых нагрузочных режимах
(например, при пуске крупного асин-
хронного электродвигателя) и при на-
личии некоторых видов переходного
сопротивления в месте повреждения.
Эти факторы снижают точность изме-
рения удаленности точки короткого за-
мыкания и, следовательно, снижают
степень селективности защиты.
В период активного применения
в релейной защите аналоговой вы-
числительной техники разработаны
более совершенные методы и сред-
ства построения дистанционных за-
щит. Предложены способы реализа-
ции дистанционных защит на основе
динамического контроля параметров,
при котором оценка удаленности
точки короткого замыкания осущест-
вляется по непосредственным пара-
метрам контролируемой линии элек-
тропередачи: индуктивности, емкости
и активному сопротивлению [2]. Эти
параметры достаточно строго харак-
теризуют свойства контролируемой
линии в условиях переходных процес-
сов, что обеспечивает более высокую
точность оценки удаленности точки
короткого замыкания. При этом опре-
деляют зону защищаемой сети, в ко-
торой находится точка короткого за-
мыкания, по индуктивности, емкости
и активному сопротивлению в реаль-
ном (текущем) времени и формируют
сигнал на отключение поврежденной
линии с выдержкой времени, соответ-
ствующей удаленности точки коротко-
го замыкания от места установки за-
щиты.
Однако при аналоговой реализации
процесс короткого замыкания анали-
зируется только в текущем времени,
и нет возможности выполнить повтор-
ные (итерационные) вычисления уда-
ленности точки короткого замыкания,
которые позволили бы повысить точ-
ность измерений.
Важнейшей особенностью цифро-
вой техники является способность за-
поминать сигналы и воспроизводить их
в последующем. Применение цифро-
вой техники целесообразно для улуч-
шения свойств релейной защиты.
В этой связи, в рамках договора
на выполнение научно-исследова-
тельской и опытно-конструкторской
работы (НИОКР) между ООО «НПП
Бреслер» и ПАО «Россети Московский
регион» разработана новая, более со-
вершенная дистанционная защита.
Улучшение основных характеристик
защиты достигнуто за счет реализа-
ции на цифровой элементной базе пу-
тем регистрации процесса короткого
замыкания и итерационного косвен-
ного измерения удаленности точки ко-
роткого замыкания с помощью более
точной модели контролируемой защи-
той линии.
По токам и напряжениям, соответ-
ствующим аварийному и нормальному
(доаварийному) режимам, вычисляют
аварийные составляющие, которые,
103
К
E
C
Н
ТТ
Блок
сравнения
Блок
Блок
управления
выключателем
моделирования
КЗ в точке К
н
Блок
моделирования
КЗ в точке К
к
Блок
регистрации
ТН
Н
К
к
К
н
Отсчет
ВВС
Дистанционный
орган
Датчик
тока
Датчик
напряжения
Рис
. 1.
Структурная
схема
дистанционной
защиты
согласно принципу наложения
[3], определяются, главным
образом, видом и местом по-
вреждения. Их использование
позволяет отстроиться от вли-
яния нагрузочного режима при
расчете места повреждения.
На основе аварийных со-
ставляющих с помощью двух
моделей защищаемой линии
электропередачи определяют
реактивные мощности пред-
полагаемых (расчетных) цепей
короткого замыкания при по-
вреждении в начале и в кон-
це защищаемой линии соот-
ветственно. Предположив, что
сопротивление в месте по-
вреждения имеет активный
(резистивный) характер, счи-
тают повреждение внутренним
(на защищаемой линии), когда
знаки двух полученных значе-
ний реактивной мощности раз-
личны.
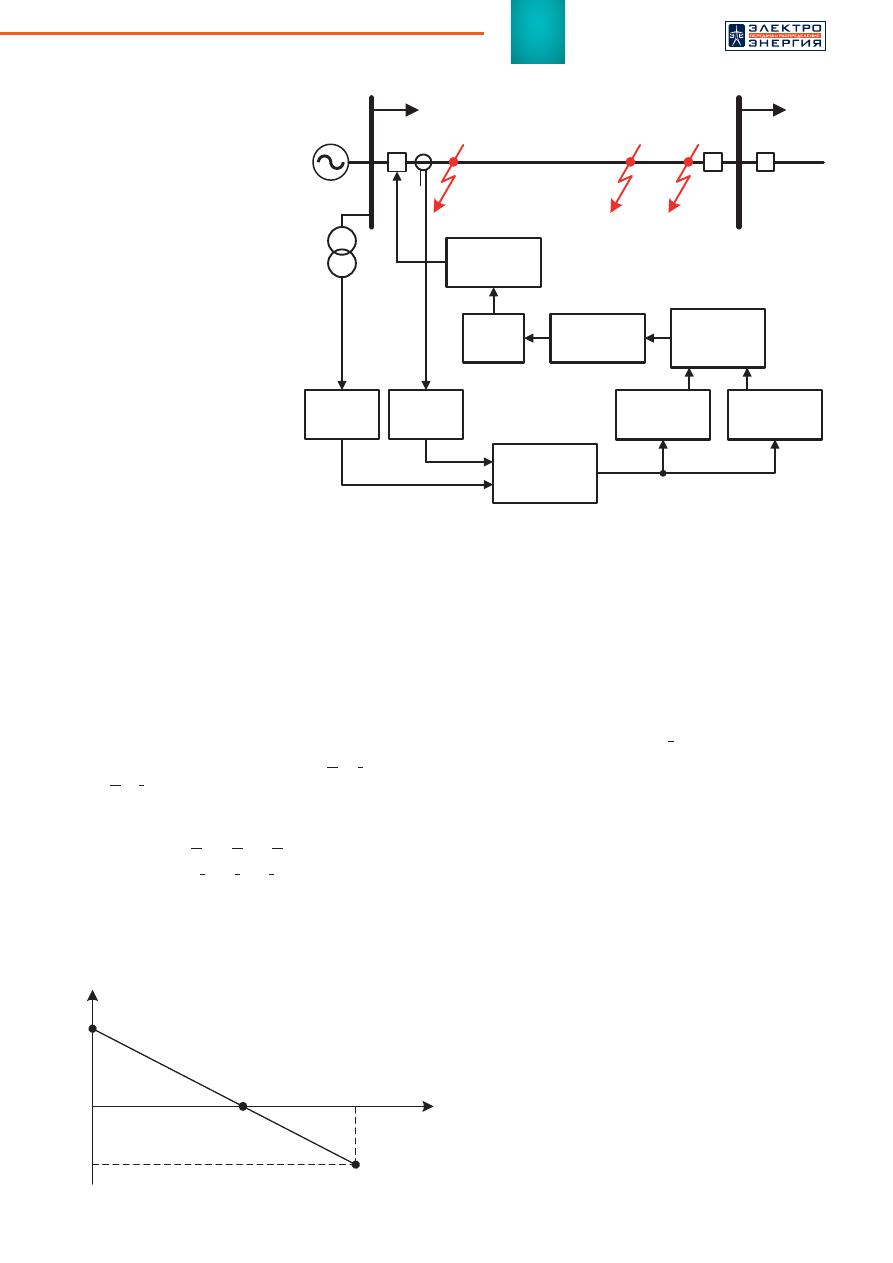
На рисунке 1 показана структурная схема дистан-
ционной защиты применительно к цифровой реали-
зации.
Сигналы от датчиков тока и напряжения посту-
пают в блок регистрации, который осуществляет
непрерывную запись и хранение измеренных зна-
чений. При возникновении короткого замыкания
в произвольной точке К линии электропередачи
данный блок выявляет начало переходного про-
цесса и на основании имеющейся информации об
измеренных величинах формирует два набора зна-
чений токов и напряжений, которые соответствуют
предшествующему (доаварийному) [
U
П
п
С
д
I
П
п
С
д
] и теку-
щему [
U
П
т
С
к
I
П
т
С
к
] режимам работы сети. По ним вычис-
ляются аварийные составляющие токов и напря-
жений:
U
П
а
С
в
=
U
П
т
С
к
–
U
П
п
С
д
;
(1)
I
П
а
С
в
=
I
П
т
С
к
–
I
П
п
С
д
.
(2)
Здесь же определяется вид повреждения.
Полученные наборы токов и напряжений посту-
пают на входы блоков моделирования короткого
замыкания. Они осуществляют математический пе-
ресчет наблюдаемых величин в ток ветви повреж-
дения (
I
f
) и напряжение в точке повреждения (
U
f
),
исходя из предположения, что короткое замыкание,
тип которого соответствует тому, что было опреде-
лено блоком регистрации, возникло в начале (точка
К
н
) и конце (точка К
к
) зоны последней ступени ДЗ
соответственно. По ним рассчитывают реактивные
мощности ветвей повреждения в точках К
н
и К
к
. При
этом каждому виду замыкания соответствует свое
расчетное выражение, которое в случае трехфаз-
ного замыкания будет иметь следующий вид:
Q
f
=
Im
(
U
f
·
İ
f
).
(3)
Знаки полученных значений реактивной мощ-
ности сопоставляются в блоке сравнения и, в слу-
чае их отличия, величины
Q
н
и
Q
к
преобразуют-
ся, согласно диаграмме, изображенной на рисун-
ке 2, в координату повреждения по следующей
формуле:
x
f
=
Q
н
·
L
/ (
Q
н
–
Q
к
),
(4)
где
L
— длина защищаемой зоны, км.
Полученная координата дистанционным орга-
ном сравнивается с длинами зон отдельных сту-
пеней, и в зависимости от результата сравнения
формируется сигнал срабатывания конкретной
ступени, а блок отсчета выдержки времени вносит
соответствующую задержку на выдачу команды от-
ключения на блок управления выключателем.
Кроме этого, полученная координата места по-
вреждения (удаленность точки короткого замыкания)
отображается на экране устройства, что позволяет
быстро и эффективно организовать ремонтно-вос-
становительные работы.
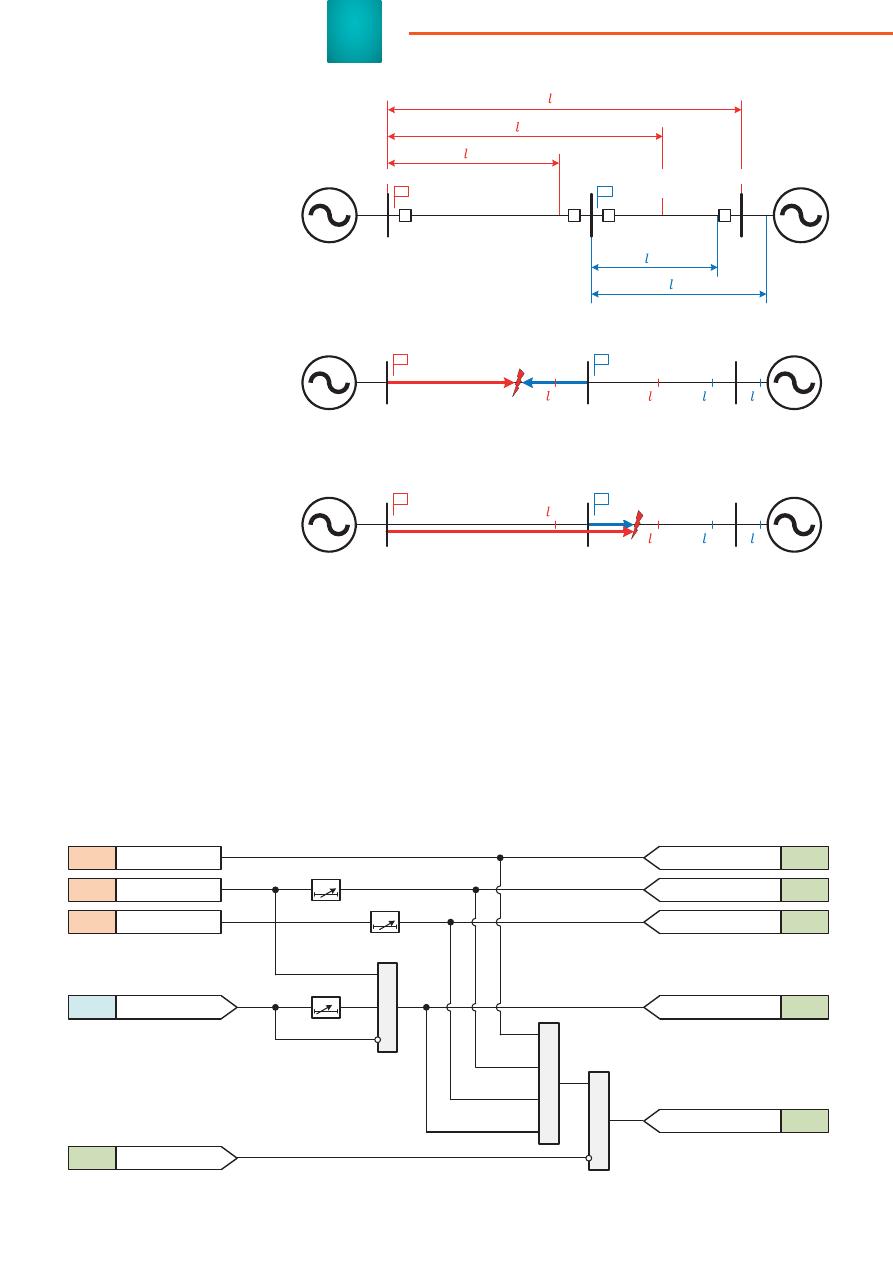
В качестве примера можно рассмотреть схему,
изображенную на рисунке 3. На ней показаны дис-
танционные защиты линий 1 и 2 и зоны срабатыва-
ния их ступеней.
Рис
. 2.
Диаграмма
реактивной
мощности
x
, км
Q
, ВАр
Q
н
Q
к
0
x
f
L
№
6 (63) 2020
104
РЕЛЕЙНАЯ ЗАЩИТА
И АВТОМАТИКА
Рис
. 3.
Схема
защищаемой
сети
(
пример
)
Рис
. 4.
Схема
и
диаграмма
работы
защит
при
замыкании
на
линии
1
Рис
. 5.
Схема
и
диаграмма
работы
защит
при
замыкании
на
линии
2
Рис
. 6.
Логическая
схема
действия
дистанционной
защиты
С1
С2
ПС А
ПС Б
ПС В
Линия 1
50 км
1ст
1
2ст
1
1ст
2
2ст
2
Линия 2
35 км
3ст
1
1
2
С1
С2
ПС А
ПС Б
ПС В
1
2
Линия 1
50 км
Линия 2
35 км
1ст
1
2ст
1
1ст
2
2ст
2
30 км
-20 км
0
0
С1
С2
ПС А
ПС Б
ПС В
1
2
Линия 1
50 км
Линия 2
35 км
1ст
1
2ст
1
1ст
2
2ст
2
10 км
60 км
0
0
Тср_2ст
ВВС
Л
Срабатывание ДЗ
T
Л
Вывод защиты
Тср_3ст
ВВС
T
ИО
0
≤
x
f
≤
l
1ст
ИО
l
1ст
<
x
f
≤
l
2 ст
ИО
l
2ст
<
x
f
≤
l
3 ст
Л
Первая ступень ДЗ
Л
Вторая ступень ДЗ
Л
Третья ступень ДЗ
Д
РПО
Тв_ускор
ВВВ
T
Л
Ускорение ДЗ
1
&
&
При замыкании на расстоя-
нии 30 км от ПС А (рисунок 4)
дистанционная защита ли-
нии 1 в ходе описанных выше
расчетов получит координату
повреждения
x
1
f
, равную 30 км.
При сравнении с зонами сту-
пеней будет выполняться
условие:
0 <
x
1
f
<
l
1
1ст
,
и вызовет срабатывание пер-
вой ступени без выдержки
времени.
Координата повреждения
x
2
f
, рассчитанная защитой ли-
нии 2 при этом же поврежде-
нии, будет равна –20 км, что
является признаком внешнего
КЗ, поэтому защита 2 не сра-
ботает.
При замыкании на расстоя-
нии 10 км от ПС Б (рисунок 5)
координата повреждения за-
щиты линии 1 будет равна
60 км. Это расстояние соот-
ветствует условию срабаты-
вания второй ступени:
l
1
1ст
<
x
1
f
<
l
1
2ст
.
В результате защита линии 1 сформирует коман-
ду на отключение своей линии с выдержкой време-
ни, соответствующей второй ступени защиты.
Координата повреждения
x
2
f
, рассчитанная защи-
той линии 2, равна 10 км. При этом выполняется ус-
ловие срабатывания первой ступени защиты 2:
0 <
x
2
f
<
l
2
1ст
,
и дистанционная защита линии 2 сработает без вы-
держки времени.
Условие срабатывания третьей ступени защиты
линии 1 можно записать так:
l
1
2ст
<
x
1
f
<
l
1
3ст
.
При выполнении этого условия защита срабаты-
вает с выдержкой времени, соответствующей 3 сту-
пени.
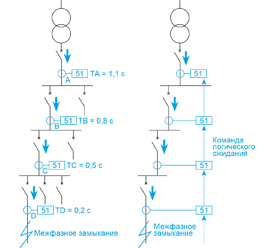
Формально логика действия дистанционной за-
щиты представлена в виде схемы на рисунке 6.
Сигналы срабатывания той или иной ступени
формируются измерительными органами, контро-
лирующими попадание координаты повреждения
x
f
в соответствующую зону:
– логический сигнал срабатывания первой ступени
«Первая ступень ДЗ» при выполнении условия
0 ≤
x
f
≤
l
1ст
;
105
– логический сигнал срабатывания второй ступени
«Вторая ступень ДЗ» при выполнении условия
l
1ст
≤
x
f
≤
l
2ст
;
– логический сигнал срабатывания третьей ступени
«Третья ступень ДЗ» при выполнении условия
l
2ст
≤
x
f
≤
l
3ст
.
При этом вторая ступень ДЗ срабатывает через
время, определяемое таймером «Тср_2ст», а тре-
тья — таймером «Тср_3ст».
При срабатывании любой из ступеней формиру-
ется логический сигнал «Срабатывание ДЗ», дей-
ствующий на отключение линии. Защита блокиру-
ется при появлении логического сигнала «Вывод
защиты».
Также реализовано автоматическое ускоре-
ние (АУ) второй ступени при опробовании линии.
Режим АУ вводится на время, определяемое вы-
держкой времени «Тв_ускор», по факту исчезно-
вения внешнего сигнала «РПО» от блок-контактов
выключателя.
Выбор параметров срабатывания дистанционной
защиты выполняется с учетом особенностей защи-
щаемой сети и реализации защиты.
Эквивалентное удельное сопротивление прямой
последовательности, используемое в модели линии
электропередачи, определяется следующим образом:
Z
0
1экв
=
N
i
= 1
(
L
i
·
Z
0
1
i
) /
N
i
= 1
L
i
,
(5)
где
N
— количество участков однородности;
L
i
—
длина
i
-го участка однородности, км;
Z
0
1
i
— удель-
ное сопротивление прямой последовательности
i
-го
участка однородности, Ом/км.
Под участком однородности понимается отрезок
ЛЭП, на протяжении которого удельное сопротивле-
ние не изменяется. При определении
Z
0
1экв
должны
учитываться все участки защищаемой и следующей
линий электропередачи, в том числе и ответвления
от этих ЛЭП.
Удельное сопротивление, используемое в модели
ЛЭП, задается своими активной
R
0
и реактивной
X
0
составляющими, которые вычисляются следующим
образом:
R
0
=
Re
(
Z
0
1экв
);
(6)
X
0
=
Im
(
Z
0
1экв
).
(7)
Точность определения места повреждения на ли-
нии определяется двумя основными факторами:
– разнородность линии электропередачи;
– свойства ответвительных подстанций.
Разнородность линии электропередачи выра-
жается в неравенстве активных и индуктивных со-
ставляющих удельных сопротивлений отдельных
участков. Она наиболее существенно оказывает
влияние на точности ОМП в случае кабельно-воз-
душных линий.
Абсолютную погрешность, вызванную разнород-
ностью линии, при вычислении расстояния до места
повреждения за
n
-м участком можно оценить следу-
ющим образом:
n
= |
n
i
= 1
(
Z
0
1
i
·
L
i
)/
Z
0
1экв
| –
n
i
= 1
L
i
.
(8)
По формуле (8) необходимо рассчитать две
ошибки: при повреждении в конце защищаемой ли-
нии
з
и в конце первой зоны защиты следующей
ЛЭП
сл
. Последняя необязательна в случае тупи-
ковой ЛЭП.
Составляющая ошибки ОМП
x
н
и коэффициент
отстройки при вычислении зоны первой ступени
k
отс1н
, определяемые неоднородностью линии, будут
вычисляться следующим образом:
x
н
= –
з
/ 2;
(9)
k
отс1н
= 1 –
x
н
/
L
,
(10)
где
L
— длина защищаемой линии, км.
Коэффициент отстройки при вычислении зоны
второй ступени, определяемый неоднородностью
линии и используемый в случае ЛЭП с двухсторон-
ним питанием, будет вычисляться следующим об-
разом:
k
отс2н
= 1 – (
x
н
–
сл
) / (
L
+
l
1ст сл
),
(11)
где
l
1ст сл
— зона срабатывания первой ступени за-
щиты следующей линии, км.
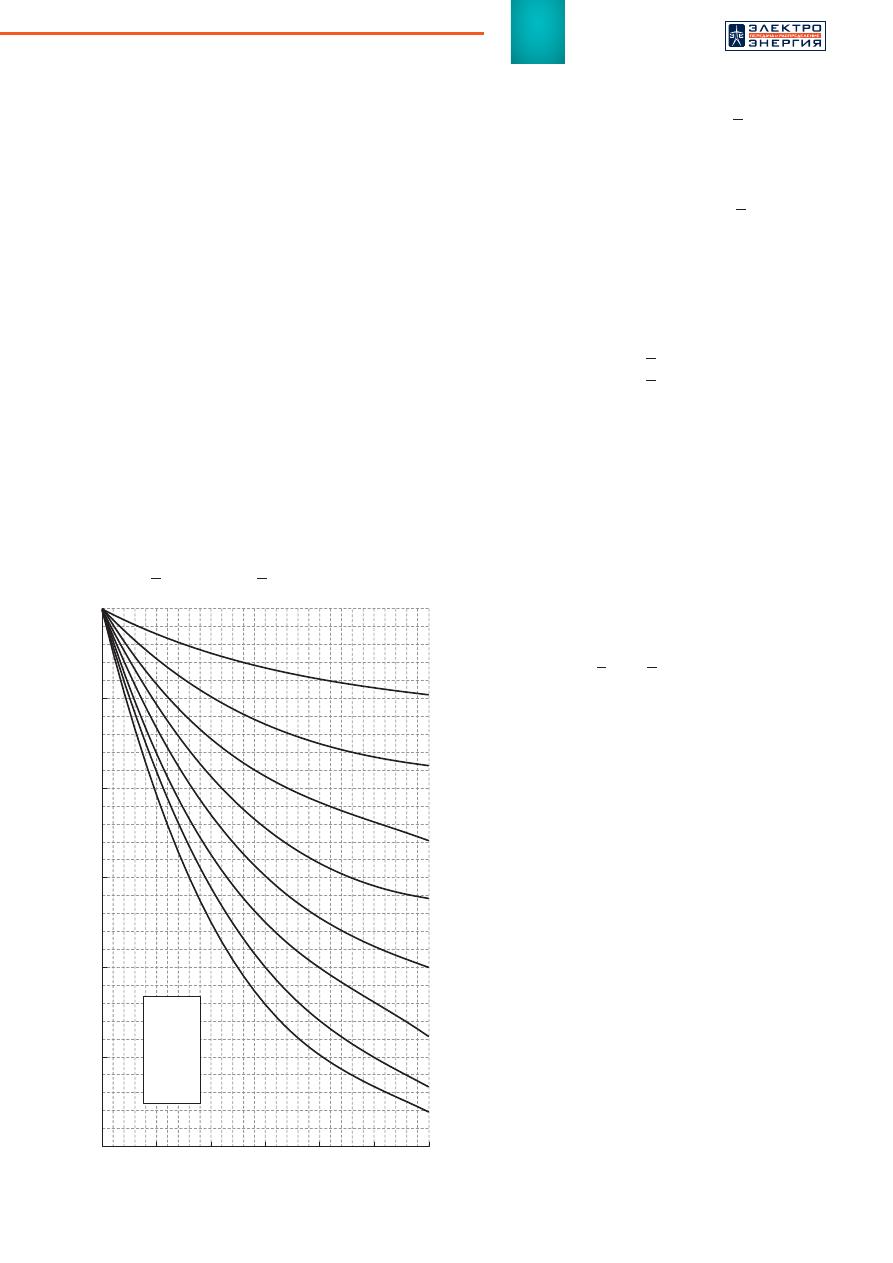
Ошибка, вызванная неучетом в модели ответви-
тельных подстанций, должна определяться по кри-
вой относительной погрешности ОМП, зависящей от
суммарной мощности отпаек. На рисунке 7 представ-
лены зависимости
(
S
отв
), построенные для разных
длин ЛЭП.
Рис
. 7.
Кривые
относительной
погрешности
ОМП
0
0,5
1
1,5
2
2,5
3
-30
-25
-20
-15
-10
-5
0
S
Σ
отв
, МВА
ε
, %
1: 5 км
2: 10 км
3: 15 км
4: 20 км
5: 25 км
6: 30 км
7: 35 км
8: 40 км
1
2
3
4
5
6
7
8
№
6 (63) 2020

106
РЕЛЕЙНАЯ ЗАЩИТА
И АВТОМАТИКА
В качестве длины, по которой выбирается кривая,
следует выбирать длину защищаемой ЛЭП, если она
является тупиковой:
L
кр
=
L
,
(12)
или сумму длин защищаемой и следующей линий
в противном случае:
L
кр
=
L
+
L
сл
,
(13)
где
L
сл
— длина следующей линии, км.
Далее, просуммировав мощности всех ответвле-
ний в пределах выбранной длины
L
кр
, необходимо по
кривой найти значение относительной погрешности
ОМП
и вычислить по ней ошибку ОМП
x
о
и коэф-
фициент отстройки при вычислении зон ступеней
k
отс о
, определяемые неучетом ответвлений, по сле-
дующим формулам:
x
о
= –(
L
кр
) / (2 · 100);
(14)
k
отс о
= 1 +
/ (2 · 100).
(15)
Результат определения места повреждения дол-
жен корректироваться на величину, равную сумме
двух составляющих:
x
=
x
н
+
x
о
.
(16)
Коэффициент отстройки, используемый при вы-
числении зоны срабатывания первой ступени защи-
ты, определяется следующим образом:
k
отс1
=
k
отс1н
·
k
отс о
.
(17)
Для второй ступени:
k
отс2
=
k
отс2н
·
k
отс о
.
(18)
Если полученное значение больше 0,95, то коэф-
фициент приравнивается 0,95.
Первая ступень осуществляет защиту без вы-
держки времени большей части ЛЭП. Ее зона сраба-
тывания отстраивается от длины защищаемой линии
следующим образом:
l
1ст
=
k
отс1
·
L
.
(19)
Отстройка от замыканий за ответвительными
подстанциями выполняется за счет того, что рассто-
яние до места повреждения, рассчитанное метода-
ми ОМП, при КЗ за трансформатором оказывается
за пределами зоны срабатывания первой ступени
защиты. Однако в случае, когда длина ответвления
соразмерна с длиной защищаемой ЛЭП, а на самой
ответвительной подстанции имеется мощный транс-
форматор, могут возникнуть трудности с обеспече-
нием селективной работы ДЗ.
Для того чтобы проверить, обеспечивается ли
отстройка от замыканий за
i
-м ответвлением, не-
обходимо вычислить эквивалентное расстояние до
стороны НН трансформатора по следующей фор-
муле:
L
экв
i
=
L
отв
i
+
L
т
i
фикт
=
L
1
i
+
L
2
i
+ |
Z
т
i
/
Z
0
1экв
|, (20)
где
L
отв
i
=
L
1
i
+
L
2
i
— расстояние от места установ-
ки защиты до подстанции
i
-го ответвления, км;
L
1
i
— расстояние от места установки защиты до
i
-го
ответвления, км;
L
2
i
— длина
i
-го ответвления, км;
L
т
i
фикт
= |
Z
т
i
/
Z
0
1экв
| — фиктивная длина трансфор-
матора
i
-го ответвления, км;
Z
т
i
— сопротивление
трансформатора
i
-го ответвления, Ом.
Если для
i
-го ответвления выполняется условие:
L
экв
i
≥ 1,2 ·
L
,
(21)
то защита надежно отстроена от замыканий за ней.
Если для каких-то ответвлений условие (21) не
выполняется, то первая ступень должна быть от-
строена от минимального расстояния до подстанций
этих ответвлений:
l
1ст
=
k
отс1
·
min
(
L
отв
i
).
(22)
Для тупиковых линий в качестве длины защищае-
мой ЛЭП следует брать максимальное из всех полу-
чившихся значений
L
отв
i
:
L
=
max
(
L
отв
i
).
(23)
Вторая ступень предназначена для защиты всей
линии. Для линий с двухсторонним питанием зона
срабатывания второй ступени выбирается, исходя
из условия согласования с первой ступенью защиты
следующей ЛЭП:
l
2ст
=
L
+
k
отс2
·
l
1ст сл
,
(24)
а для тупиковых линий принимается равной длине
защищаемой ЛЭП:
l
2ст
=
L
.
(25)
Третья ступень осуществляет резервирование за-
щиты следующей линии и используется на линиях
с двухсторонним питанием, поэтому ее зона сраба-
тывания принимается равной сумме длин защищае-
мой и следующей линий с учетом возможного удли-
нения, обусловленного погрешностью ОМП из-за
дополнительной подпитки со стороны ответвлений:
l
3ст
=
k
удл
· (
L
+
L
сл
),
(26)
где
L
сл
— длина следующей линии, км;
k
удл
= 1,0÷1,1 —
коэффициент удлинения, о.е.
На линиях с односторонним и двухсторонним пи-
танием коэффициент удлинения следует принимать
равным 1.
В случае тупиковых линий зона третьей ступени
берется равной зоне второй:
l
3ст
=
l
2ст
.
(27)
Первая ступень выполняется без выдержки вре-
мени, однако из-за того, что величины аварийного
режима фиксируются только по факту завершения
переходного процесса и необходимо время для об-
работки данных, сигнал на срабатывание формиру-
ется через 30÷50 мс после возникновения аварии.
В случае линии с двухсторонним питанием вы-
держка времени второй ступени должна быть согла-
сована с первой ступенью защиты следующей линии
(с которой производится согласование), с учетом вы-
держек времени устройства резервирования при от-
казе выключателей:
t
2ст
=
t
УРОВ
+
t
,
(28)
107
где
t
УРОВ
— время действия УРОВ следующей линии,
мс;
t
= 300÷500 — ступень селективности, мс.
Вторая ступень на тупиковых линиях согласуется
с защитами трансформаторов ответвительных под-
станций:
t
2ст
=
t
.
(29)
Выдержка времени третьей ступени должна быть
согласована со второй ступенью защиты следующей
линии:
t
3ст
=
t
2ст сл
+
t
,
(30)
где
t
2ст сл
— выдержка времени второй ступени сле-
дующей линии, мс.
Выдержка времени третьей ступени, устанавли-
ваемой на тупиковых линиях, принимается равной
максимально возможному значению, что означает
фактический вывод из работы данной ступени.
При автоматическом ускорении вторая ступень
вводится в работу на время опробования линии,
и оно должно быть меньше времени включения ли-
нии с противоположной стороны при успешном АПВ.
Рекомендуемое значение времени ввода автомати-
ческого ускорения 0,1 с.
ЗАКЛЮЧЕНИЕ
1. Создана дистанционная защита с улучшенными
показателями по точности и селективности, ре-
ализуемая с использованием своеобразия циф-
ровой элементной базы, и совместимая с циф-
ровыми системами управления подстанциями
и сетями. В основу построения защиты положены
методы определения места повреждения на ли-
ниях электропередачи. Это позволило повысить
точность измерения удаленности точки короткого
замыкания, снизить трудоемкость выбора пара-
метров срабатывания, повысить эффективность
ремонтно-восстановительных работ и тем самым
повысить надежность электроснабжения.
2. Создан опытный образец разработанной дис-
танционной защиты. Проведены лабораторные
и заводские испытания. Результаты проведенных
экспериментальных исследований позволили
подтвердить правомерность методов построения
защиты, допущений и ограничений, принятых при
разработке защиты.
3. Разработана и апробирована методика выбора
параметров срабатывания вновь разработанной
дистанционной защиты, учитывающая особен-
ности цифровой технологии определения удален-
ности места короткого замыкания. Учтены все ос-
новные ограничения и допущения, позволяющие
обеспечить селективную работу защиты в реаль-
ных распределительных сетях.
ЛИТЕРАТУРА
1. Чернобровов Н.В. Релейная защита. М.: Энергия, 1974.
680 с.
2. Ванин В.К., Павлов Г.М. Релейная защита на элементах
вычислительной техники. Л.: Энергоатомиздат, 1991.
336 с.
3. Зевеке Г.В., Ионкин П.А., Нетушил А.В., Страхов С.В.
Основы теории цепей: Учеб. для вузов. 5-е изд., пере-
раб. М.: Энергоатомиздат, 1989. 528 с.
№
6 (63) 2020
Оригинал статьи: Совершенствование дистанционных защит при цифровой реализации
Широко известны способы и устройства дистанционной защиты (ДЗ), в которых расстояние до места повреждения определяется с помощью реле сопротивления по косвенному принципу – изменению сопротивления контура короткого замыкания, вычисляемого по сигналам трансформаторов тока и трансформаторов напряжения [1]. Устройство защиты формирует команду на отключение линии при попадании вектора сопротивления в определенную зону (область характеристики срабатывания) на комплексной плоскости с соответствующей выдержкой времени срабатывания.