Игорь
КУЗЬМИН
,
первый
заместитель
генерального
дирек
-
тора
—
главный
инже
-
нер
ПАО
«
Ленэнерго
»
Георгий
ЕВДОКУНИН
,
д
.
т
.
н
.,
профессор
кафедры
«
Электри
-
ческие
системы
и
сети
»
ИЭиТС
ФГАОУ
ВО
СПбПУ
Нияз
МАГДЕЕВ
,
заместитель
главного
инженера
по
техно
-
логическому
развитию
и
инновациям
ПАО
«
Ленэнерго
»
Самовосстановление
в
кабельных
электрических
сетях
6–10
кВ
В
зарубежной
практике
в
отношении
сетей
среднего
напря
-
жения
,
где
процессы
определения
,
локализации
и
отключе
-
ния
поврежденного
участка
и
восстановления
питания
по
-
требителей
полностью
автоматизированы
,
применяется
термин
selfhealing,
что
означает
«
самовосстанавливающи
-
еся
» [1].
В
настоящей
статье
предложен
подход
к
автомати
-
зации
кабельной
сети
6–10
кВ
с
наделением
ее
функциями
самовосстановления
.
На
примере
участка
городской
распре
-
делительной
сети
10(6)
кВ
показано
каким
образом
внедре
-
ние
функции
самовосстановления
влияет
на
изменение
SAIFI
при
различном
числе
автоматизируемых
трансформаторных
подстанций
в
схеме
.
Кроме
того
,
величина
относительного
снижения
средней
частоты
продолжительных
отключений
от
увеличения
числа
автоматизируемых
трансформаторных
подстанций
сопоставлена
с
дополнительным
увеличением
капитальных
затрат
,
сделаны
выводы
относительно
опре
-
деления
предпочтительного
числа
пунктов
автоматизации
.
ВВЕДЕНИЕ
Повышение
ответственности
за
соблюдение
требований
качества
и
надежности
электро
-
снабжения
является
одним
из
ключевых
драйверов
стремительного
роста
автоматизации
распределительных
сетей
во
всем
мире
[2].
Статистика
отключений
потребителей
в
энергосистемах
различных
стран
мира
сви
-
детельствует
о
том
,
что
распределительные
сети
вносят
огромный
вклад
в
недоотпуск
электроэнергии
потребителю
.
Как
правило
,
на
распределительные
сети
относят
25–40%
затрат
на
передачу
электроэнергии
и
80–90%
проблем
,
связанных
с
обеспечением
надеж
-
ности
электроснабжения
.
На
надежность
функционирования
распределительных
электрических
сетей
оказыва
-
ют
влияние
такие
факторы
,
как
:
–
топология
построения
сети
;
–
степень
резервирования
связей
и
трансформаторов
;
–
тип
исполнения
ЛЭП
(
кабельная
(
КЛ
),
воздушная
(
ВЛ
),
тип
изоляции
);
–
степень
износа
оборудования
;
–
наличие
автоматического
ввода
резерва
;
8
Ежеквартальный
спецвыпуск
№
2(13),
июнь
2019
Автоматизация
электросетей
Андрей
БРИЛИНСКИЙ
,
заведующий
отделом
проектирования
и
раз
-
вития
энергосистем
АО
«
НТЦ
ЕЭС
»
Ольга
ГРУНИНА
,
старший
инженер
отдела
проектирования
и
развития
энерго
-
систем
АО
«
НТЦ
ЕЭС
»
–
степень
автоматизации
оперативно
-
технологического
управления
;
–
опасность
внешних
воздействий
(
погодные
условия
,
техногенные
условия
,
воздей
-
ствие
животных
/
людей
/
механизмов
);
–
транспортная
доступность
энергообъектов
.
Ввиду
наличия
принципиальных
отличий
в
построении
распределительных
сетей
в
городской
и
сельской
местности
применительно
к
каждому
типу
следует
рассматривать
раздельно
подходы
и
мероприятия
по
повышению
надежности
электроснабжения
потре
-
бителей
.
Распределительные
электрические
сети
мегаполиса
характеризуются
:
–
высокой
плотностью
энергопотребления
;
–
наличием
большого
числа
потребителей
1
и
2
категории
надежности
;
–
преимущественно
кабельным
исполнением
ЛЭП
;
–
высокой
плотностью
размещения
инженерных
коммуникаций
и
,
как
следствие
,
сложностью
строительства
и
реконструкции
электрических
сетей
,
а
также
высокими
рисками
повреждений
кабельных
линий
вследствие
внешних
механических
воздей
-
ствий
;
–
динамичным
ростом
электропотребления
в
условиях
жестких
требований
по
обеспе
-
чению
доступности
энергетической
инфраструктуры
.
Нагрузка
на
шинах
6(10)
кВ
одного
РП
в
мегаполисе
варьируется
в
диапазоне
от
5
до
15
МВт
и
в
ее
составе
неизбежно
присутствует
нагрузка
потребителей
первой
категории
(
грузоподъемные
механизмы
,
оборудование
пожаротушения
и
др
.).
Известно
,
что
наи
-
большая
доля
аварий
на
КЛ
в
городах
происходит
по
вине
сторонних
организаций
.
Одним
из
основных
направлений
исследований
в
области
электроснабжения
мегапо
-
лисов
является
обоснование
выбора
построения
и
практической
реализации
элементов
электрической
сети
с
целью
повышения
управляемости
и
надежности
ее
эксплуатации
и
,
как
следствие
,
снижение
рисков
,
сопутствующих
основной
деятельности
электросете
-
вых
компаний
.
Разработка
концепции
построения
автоматизированной
системы
управления
(
АСУ
)
городскими
распределительными
кабельными
сетями
6–10
кВ
охватывает
комплекс
за
-
дач
,
связанных
с
интеллектуализацией
распределения
электроэнергии
от
шин
центра
пи
-
тания
(
ЦП
) (
в
однозвеньевой
схеме
электроснабжения
)
или
распределительного
пункта
(
РП
) (
в
случае
двухзвеньевой
схемы
электроснабжения
)
до
трансформаторных
подстан
-
ций
10(6)/0,4
кВ
(
ТП
).
Под
автоматизацией
,
в
данном
случае
,
подразумевается
организа
-
ция
автоматической
локализации
повреждений
и
селективной
изоляции
поврежденного
участка
с
последующим
восстановлением
питания
максимального
числа
потребителей
,
отключенных
по
причине
возникновения
повреждения
.
Такая
автоматизация
предпола
-
гает
применение
в
сети
дистанционно
-
управляемых
коммутационных
аппаратов
,
терми
-
налов
управления
(
контроллеров
),
организацию
системы
связи
и
разработку
алгоритма
автоматизации
.
В
настоящей
статье
предложен
алгоритм
реализации
функций
самовосстановления
применительно
к
двухлучевой
схеме
электроснабжения
.
ОПРЕДЕЛЕНИЕ
ПОНЯТИЯ
«
САМОВОССТАНОВЛЕНИЕ
»
В
настоящее
время
процесс
локализации
повреждения
на
участке
распределительной
линии
6(10)
кВ
предусматривает
следующие
этапы
:
1)
фиксация
факта
повреждения
;
2)
определение
поврежденной
РЛ
;
3)
локализация
повреждения
(
выделение
поврежденного
участка
РЛ
);
4)
отключение
поврежденного
участка
РЛ
;
5)
восстановление
схемы
электроснабжения
.
Понятие
«
самовосстановление
»
подразумевает
под
собой
выполнение
всех
перечис
-
ленных
этапов
в
полностью
автоматическом
режиме
.
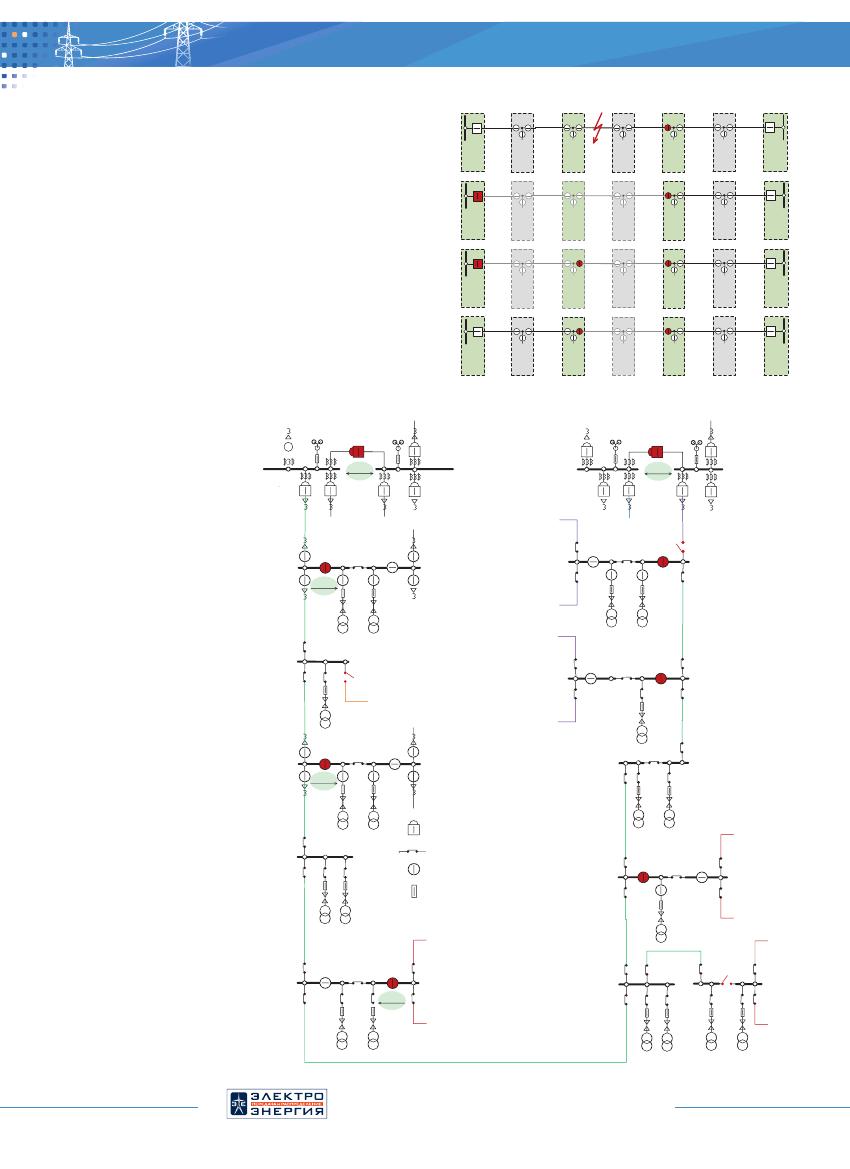
Принципиальная
идея
,
закладывае
-
мая
в
понятие
«
самовосстановление
»,
отражена
на
рисунке
1.
9
Таким
образом
,
автоматизация
локализации
поврежде
-
ний
включает
в
себя
:
–
автоматическое
определение
,
между
какими
двумя
ТП
(
или
в
какой
ТП
)
произошло
повреждение
;
–
автоматическое
отключение
(
локализация
)
только
поврежденной
связи
;
–
автоматическое
восстановление
электроснабжения
мак
-
симально
возможного
числа
потребителей
в
минимально
короткое
время
.
ОПИСАНИЕ
ПРОЦЕССА
ЛОКАЛИЗАЦИИ
ПОВРЕЖДЕНИЙ
«
ВРУЧНУЮ
»
Рассмотрим
двухлучевую
схему
электроснабжения
восьми
ТП
6(10)/0,4
кВ
,
соответствующую
технической
политике
ПАО
«
Ленэнерго
»:
каждая
ТП
подключена
по
двухлучевой
схеме
,
реализован
АВР
по
стороне
6(10)
кВ
в
ТП
,
обе
пока
-
занные
распределительные
линии
(
РЛ
)
имеют
двустороннее
питание
(
рисунок
2).
Отметим
,
что
подобный
вариант
по
-
строения
сети
является
наиболее
надежным
из
применяе
-
мых
сегодня
в
сети
ПАО
«
Ленэнерго
».
В
нормальном
режиме
каждая
ТП
имеет
один
питаю
-
щий
ввод
от
одного
источника
(
секции
РП
)
и
один
резерв
-
ный
от
другого
(
другой
секции
РП
,
либо
секции
другого
РП
).
Таким
образом
,
оба
трансформатора
ТП
в
нормальном
ре
-
жиме
запитаны
от
одного
источника
питания
,
секционный
разъединитель
в
ТП
замкнут
,
раздельная
работа
секций
РП
обепечивается
нормально
разомкнутыми
выключате
-
лями
нагрузки
(
ВН
)
ТП
:
положение
выключателей
нагрузки
на
схеме
обеспечивает
питание
первой
ТП
от
первой
РЛ
(
РЛ
1),
второй
ТП
—
от
второй
РЛ
(
РЛ
2),
третьей
ТП
—
сно
-
ва
от
первой
,
четвертой
ТП
—
снова
от
второй
и
т
.
д
.
При
отключении
одной
из
РЛ
,
например
,
при
отключении
вы
-
ключателя
распределительной
линии
в
РП
от
действия
то
-
ковых
защит
,
потребители
ТП
,
для
которых
питание
по
дан
-
ной
РЛ
является
основным
,
оказываются
отключенными
.
При
исчезновении
напряжения
на
шинах
0,4
кВ
по
дости
-
жении
времени
АВР
подается
сигнал
на
отключение
ВН
ос
-
новного
ввода
(
ВН
1.3,
ВН
3.3
и
т
.
д
.),
после
чего
включаются
ВН
резервного
ввода
(
ВН
1.4,
ВН
3.4
и
т
.
д
.)
и
электроснаб
-
жение
потребителей
ТП
восстанавливается
.
Такая
схема
ТП
является
наиболее
распространенной
в
ПАО
«
Ленэнер
-
го
».
Обе
показанные
РЛ
имеют
двустороннее
питание
(
со
стороны
РП
1
и
РП
2),
предусмотрены
«
точки
нормального
разрыва
»:
на
РЛ
1 —
отключен
выключатель
ВН
3.5
в
ТП
3,
на
РЛ
2 —
отключен
выключатель
нагрузки
ВН
2.6
в
ТП
2.
Повреждения
КЛ
в
схеме
,
показанной
на
рисунке
2,
от
-
ключаются
«
головным
»
выключателем
РЛ
в
РП
.
При
этом
в
случае
,
если
повреждение
многофазное
,
независимо
от
режима
нейтрали
сети
«
головной
»
выключатель
отключа
-
ется
автоматически
действием
релейной
защиты
,
после
чего
происходит
срабатывание
АВР
в
ТП
.
Затем
начинает
-
ся
ручной
продолжительный
и
трудоемкий
процесс
поиска
поврежденного
участка
КЛ
(
между
ТП
).
Устранение
же
однофазных
замыканий
непосредствен
-
но
в
кабельной
линии
,
которых
в
сети
,
выполненной
одно
-
фазными
кабелями
,
большинство
,
определяется
режимом
работы
ее
нейтрали
.
В
сети
с
изолированной
либо
компен
-
сированной
нейтралью
релейная
защита
,
как
правило
,
не
способна
выделить
поврежденный
участок
с
ОЗЗ
,
и
сеть
ра
-
ботает
в
таком
аварийном
режиме
продолжительное
время
до
момента
,
когда
ОЗЗ
будет
отключено
оперативным
пер
-
соналом
вручную
.
В
[3]
подробнейшим
образом
описано
протекание
элек
-
тромагнитных
процессов
при
замыканиях
в
сетях
6–35
кВ
и
влияние
на
эти
процессы
режима
нейтрали
сети
.
В
книге
также
показано
как
включение
низкоомного
резистора
в
ней
-
траль
трансформатора
6–10
кВ
создает
активный
ток
при
ОЗЗ
,
существенно
превышающий
емкостный
,
и
позволяет
,
таким
образом
,
фиксировать
ОЗЗ
простыми
токовыми
защи
-
тами
и
отключать
РЛ
с
повреждением
от
действия
этих
за
-
щит
.
В
свою
очередь
,
сделать
выводы
о
трудоемкости
оты
-
скания
и
отключения
ОЗЗ
в
кабельных
сетях
6–10
кВ
можно
на
основании
[6].
Применение
низкоомного
резистивного
заземления
по
-
зволяет
эффективно
пройти
первый
этап
процесса
управ
-
ления
отключениями
—
определить
и
отключить
распре
-
делительную
линию
с
поврежденным
кабелем
действием
простых
токовых
защит
,
в
том
числе
и
при
однофазных
за
-
мыканиях
на
землю
.
Локализация
же
повреждения
с
пере
-
ходом
на
низкоомное
резистивное
заземление
нейтрали
остается
весьма
трудоемкой
.
Однако
обеспечение
таким
режимом
нейтрали
достаточной
величины
тока
ОЗЗ
в
месте
повреждения
создает
предпосылки
к
автоматизации
процес
-
са
определения
поврежденного
участка
.
Рассмотрим
процесс
локализации
повреждений
в
схе
-
ме
на
рисунке
2.
В
случае
,
если
указанная
схема
работает
с
низкоомным
резистивным
заземлением
нейтрали
и
не
оснащена
ни
средствами
автоматизации
(
кроме
АВР
в
ТП
),
ни
средствами
связи
,
последовательность
работы
комму
-
ТП
...
...
...
...
...
...
...
РП
РП
ТП
ТП
ТП
ТП
ТП
...
...
...
...
...
...
...
РП
РП
ТП
ТП
ТП
ТП
ТП
...
...
...
...
...
...
...
РП
РП
ТП
ТП
ТП
ТП
ТП
...
..
.
...
...
...
...
...
РП
РП
ТП
ТП
ТП
ТП
1.
2.
3.
4 .
Рис
. 1.
Иллюстрация
понятия
«
самовосстановление
»
10
Ежеквартальный
спецвыпуск
№
2(13),
июнь
2019
Автоматизация
электросетей
РП
1
АВР
ТП
8
ТП
3
АВР
РП
2
8
8
с
10
с
0,2
с
0,2
с
0,2
с
0,2
с
ТП
2
ТП
1
АВР
10
с
1
с
2
с
1
с
2
с
1
с
2
с
1
с
2
с
1
с
2
с
РП
1
АВР
ТП
8
ТП
3
8
с
0,2
с
0,2
с
ТП
2
ТП
1
АВР
АВР
10
с
10
с
1
с
2
с
1
с
2
с
1
с
2
с
1
с
2
с
1
с
2
с
1
с
2
с
t
=10
с
ВН
1.3
ВН
1.4
АВР
10
с
ВН
3.3
ВН
3.4
ВН
1.1
ВН
1.5
ВН
1.2
ВН
1.6
ВН
3.1
ВН
3.2
ВН
3.5
ВН
3.6
ВН
3.3
ВН
3.4
ВН
3.1
ВН
3.2
ВН
3.5
ВН
3.6
ВН
1.3
ВН
1.4
ВН
1.1
ВН
1.2
ВН
1.5
ВН
2.6
АВР
10
с
АВР
10
с
АВР
8
с
РП
2
0,2
с
0,2
с
1
с
2
с
АВР
8
с
-
предохранитель
-
выключатель
мощности
-
выключатель
нагрузки
8
с
0,2
с
-
выдержка
времени
токовых
защит
-
выдержка
времени
АВР
-
отключенное
положение
аппаратов
отключение
t = 0,2
с
отключение
t < 10
с
включение
t = 10
с
отключение
t < 10
с
включение
t = 10
с
ВН
2.3
ВН
2.4
ВН
2.1
ВН
2.5
ВН
2.2
ВН
2.6
ВН
2.3
ВН
2.4
ВН
2.1
ВН
2.5
ВН
2.2
ВН
2.6
Рис
. 2.
Работа
двухлучевой
схемы
с
двусторонним
питанием
(
с
АВР
в
ТП
)
при
КЗ
тационных
аппаратов
при
коротком
замыкании
(
КЗ
)
на
лю
-
бой
распределительной
линии
(
РЛ
)
следующая
(
рисунок
2):
–
при
КЗ
на
РЛ
1
с
выдержкой
времени
отключается
выключатель
РЛ
1
в
РП
1
и
ТП
1,
ТП
3,
ТП
5,
ТП
7
оста
-
ются
без
напряжения
;
–
далее
по
факту
отсутствия
напряжения
в
каждой
ТП
отключаются
выключатели
нагрузки
ВН
1.3,
ВН
3.3,
ВН
5.3,
ВН
7.3,
отделяя
ТП
от
обесточенной
РЛ
;
затем
после
расхождения
их
ножей
действием
АВР
включают
-
ся
выключатели
нагрузки
ВН
1.4,
ВН
3.4,
ВН
5.4,
ВН
7.4,
подключая
их
к
питанию
со
стороны
РЛ
2 (
автоматиче
-
ское
отключение
всех
ВН
i
,
не
имеющих
привода
,
стано
-
вится
возможным
из
-
за
предварительного
взведенного
положения
их
отключающей
пружины
);
–
в
результате
через
время
срабатывания
АВР
(
≈
10
се
-
кунд
)
обесточенные
ТП
1,
ТП
3,
ТП
5,
ТП
7
переходят
на
питание
от
РЛ
2.
После
этого
начинается
длительный
процесс
поиска
по
-
врежденного
участка
РЛ
(
между
какими
ТП
),
оперативно
-
вы
-
ездная
бригада
(
ОВБ
)
объезжает
большую
часть
ТП
в
схеме
11
и
проводит
серию
различных
измерений
[6],
по
результатам
завершения
которых
повреж
-
денный
участок
отключается
вручную
с
обеих
сторон
(
действиями
ОВБ
)
посредством
комму
-
тации
ближайших
к
месту
повреждения
выклю
-
чателей
нагрузки
(
в
примере
:
ВН
1.5
и
ВН
2.1).
Далее
вручную
действиями
ОВБ
производятся
переключения
:
включается
выключатель
на
-
грузки
ВН
3.5 (
отключенный
в
нормальном
ре
-
жиме
),
дается
команда
на
включение
выключа
-
теля
РЛ
1
в
РП
1,
производится
возврат
АВР
(
переключение
ТП
1,
ТП
3,
ТП
5
и
ТП
7
обратно
на
питание
от
РЛ
1),
взводятся
пружины
отклю
-
чения
всех
ВН
.
В
результате
формируется
ремонтная
схе
-
ма
(
рисунок
3).
Все
нечетные
ТП
запитывают
-
ся
по
РЛ
1,
причем
ТП
1 —
со
стороны
РП
1,
а
ТП
3,
ТП
5,
ТП
7 —
со
стороны
РП
2.
Четные
ТП
запитываются
по
РЛ
2,
причем
ТП
2 —
со
стороны
РП
1,
а
ТП
4,
ТП
6,
ТП
8 —
со
стороны
РП
2.
То
есть
точка
нормального
токораздела
РЛ
2
остается
на
разомкнутом
выключателе
ВН
2.6,
а
точка
токораздела
РЛ
1
переносит
-
ся
с
выключателя
нагрузки
ВН
3.5 (
рисунок
2)
на
выключатели
нагрузки
ВН
1.5
и
ВН
2.1
(
рисунок
3).
Затем
повреждение
отключенной
кабельной
линии
между
ТП
1
и
ТП
2
ликвиди
-
руется
ремонтной
бригадой
.
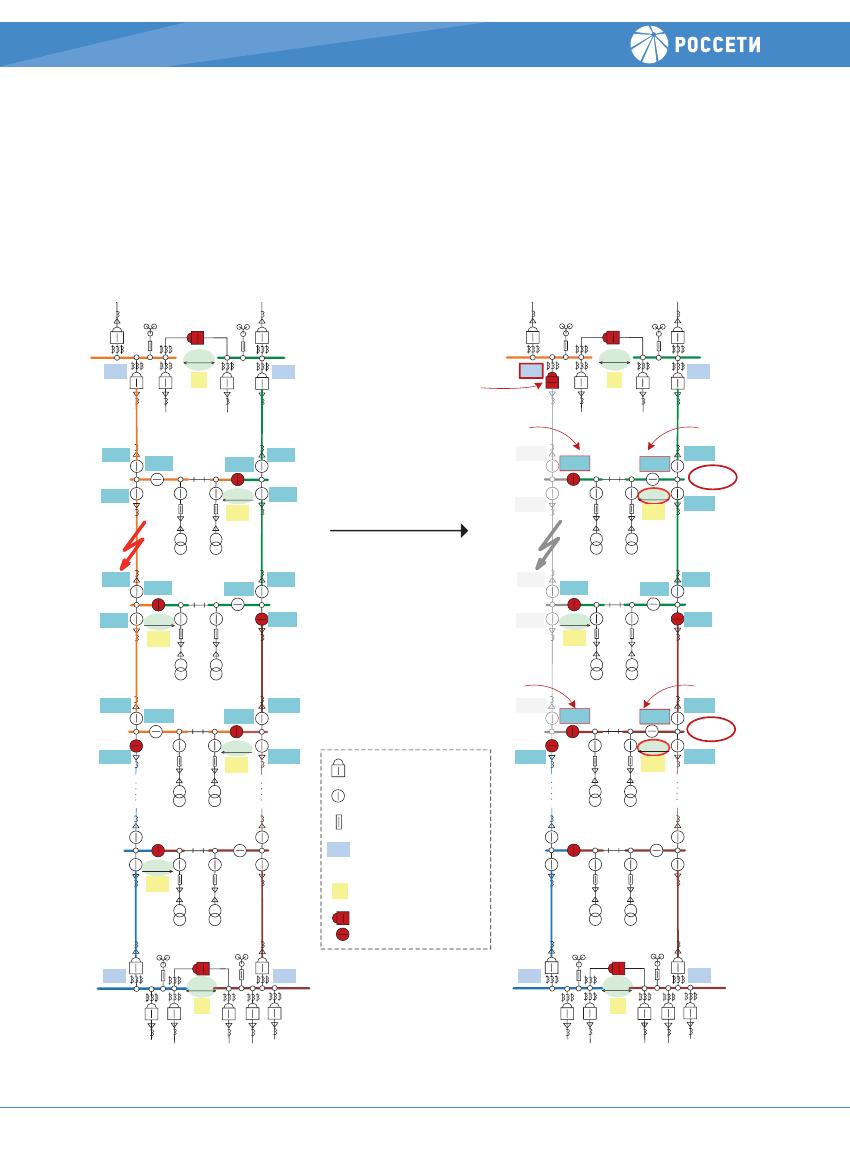
ОПИСАНИЕ
АВТОМАТИЧЕСКОЙ
ЛОКАЛИЗАЦИИ
ПОВРЕЖДЕНИЙ
Учитывая
,
что
низкоомное
резистивное
за
-
земление
нейтрали
создает
при
ОЗЗ
ток
,
до
-
статочный
для
срабатывания
простых
токовых
защит
,
становится
возможным
предложить
универсальный
подход
к
ликвидации
повреж
-
дений
независимо
от
типа
повреждения
(
одно
-
фазное
или
многофазное
).
Первоочередным
,
необходимым
для
авто
-
матизации
схемы
элементом
является
изме
-
рительный
орган
,
фиксирующий
прохождение
тока
повреждения
(
индикаторы
/
указатели
про
-
хождения
тока
КЗ
—
ИТКЗ
,
УТКЗ
).
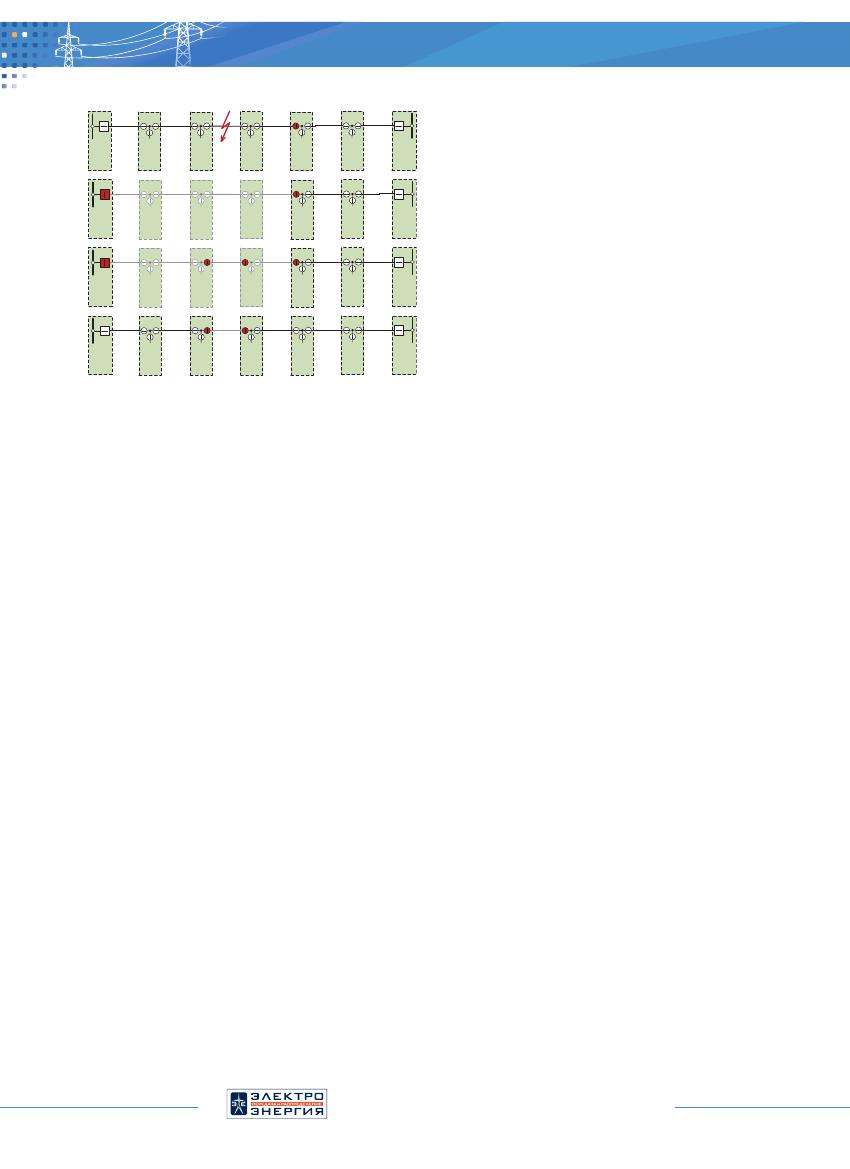
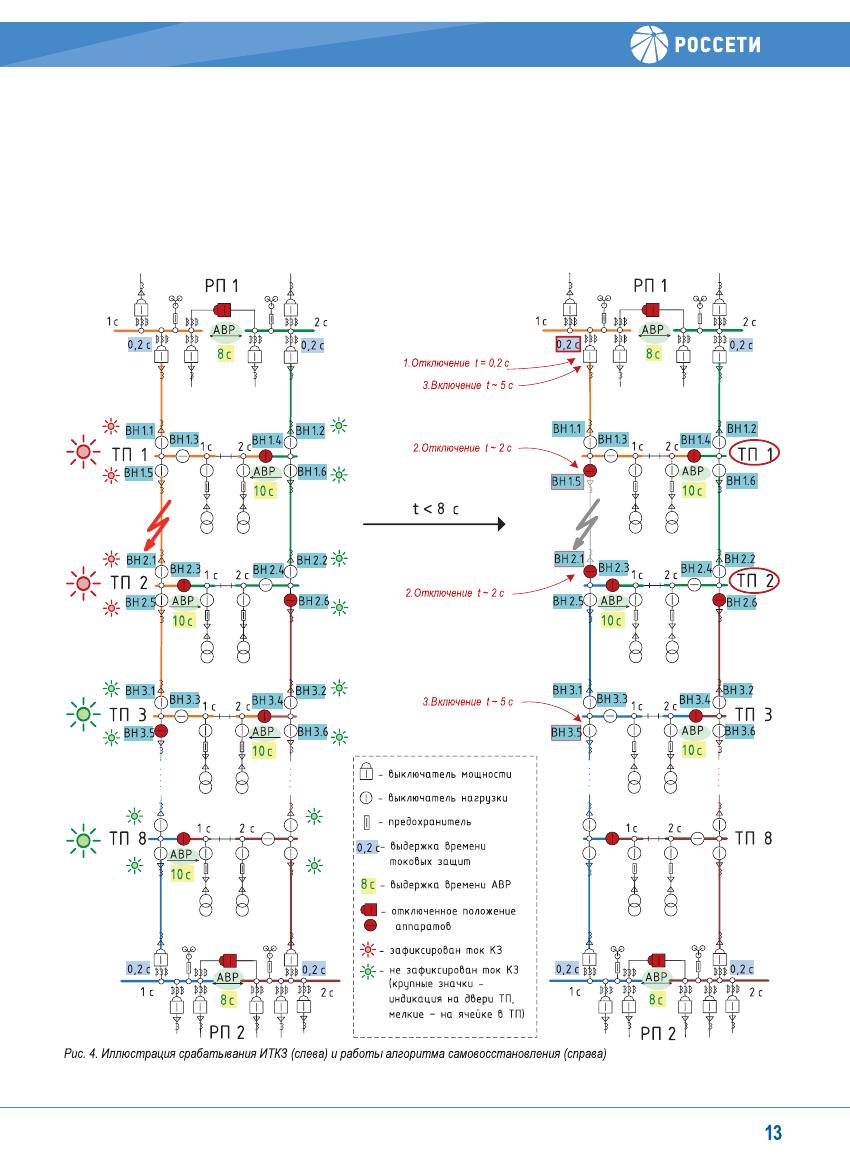
Установка
одних
только
подобных
индикаторов
на
каждом
кабельном
присоединении
в
ТП
(
рисунок
4,
схема
слева
)
упростит
про
-
цедуру
поиска
поврежденного
участка
:
при
объезде
рас
-
пределительной
линии
ОВБ
не
потребуется
производить
определение
направления
повреждения
при
помощи
вы
-
полнения
продолжительной
серии
измерений
(
устройством
поиска
повреждений
УПП
[4],
либо
мегаомметром
)
в
каждой
ТП
,
достаточно
визуального
осмотра
состояния
индикатора
.
Для
удобства
индикация
может
быть
выведена
на
дверь
ТП
,
то
есть
посредством
визуального
осмотра
ТП
бригада
ОВБ
Ǜǚ
1
NjǍǛ
ǝǚ
8
ǝǚ
3
8
Ǽ
0,2
Ǽ
0,2
Ǽ
ǝǚ
2
ǝǚ
1
NjǍǛ
NjǍǛ
10
Ǽ
10
Ǽ
1
Ǽ
2
Ǽ
1
Ǽ
2
Ǽ
1
Ǽ
2
Ǽ
1
Ǽ
2
Ǽ
1
Ǽ
2
Ǽ
t ~
5-7
Ȃ
-
ǺǻǰǯǹȀǻǫǸdzǽǰǶȇ
-
ǭȆǵǶȉȂǫǽǰǶȇ
ǷǹȄǸǹǼǽdz
-
ǭȆǵǶȉȂǫǽǰǶȇ
ǸǫǮǻǾDzǵdz
8
Ǽ
0,2
Ǽ
-
ǭȆǯǰǻDZǵǫ
ǭǻǰǷǰǸdz
ǽǹǵǹǭȆȀ
DzǫȄdzǽ
-
ǭȆǯǰǻDZǵǫ
ǭǻǰǷǰǸdz
NjǍǛ
-
ǹǽǵǶȉȂǰǸǸǹǰ
ǺǹǶǹDZǰǸdzǰ
ǫǺǺǫǻǫǽǹǭ
NjǍǛ
10
Ǽ
Ǎǘ
1.3
Ǎǘ
1.4
Ǎǘ
1.1
Ǎǘ
1.2
Ǎǘ
1.5
Ǎǘ
1.6
Ǜǚ
2
0,2
Ǽ
0,2
Ǽ
1
Ǽ
2
Ǽ
NjǍǛ
8
Ǽ
Ǎǘ
2.3
Ǎǘ
2.4
Ǎǘ
2.1
Ǎǘ
2.5
Ǎǘ
2.2
Ǎǘ
2.6
2.
ǵǶȉȂǰǸdzǰ
ǭȆǵǶȉȂǫǽǰǶȊ
Ǎǘ
3.3
Ǎǘ
3.4
Ǎǘ
3.1
Ǎǘ
3.5
Ǎǘ
3.2
Ǎǘ
3.6
1 .
ǽǵǶȉȂǰǸdzǰ
Ǎǘ
,
ǹǺǻǰǯǰǶǰǸǸǹǮǹ
ǵǫǵ
«
ǬǶdzDZǫǴȃdzǴ
»
2.
ǵǶȉȂǰǸdzǰ
Ǎǘ
ǭ
ǽǹȂǵǰ
ǸǹǻǷǫǶȇǸǹǮǹ
ǻǫDzǻȆǭǫ
3.
ǹDzǭǻǫǽ
NjǍǛ
1 .
ǽǵǶȉȂǰǸdzǰ
Ǎǘ
,
ǹǺǻǰǯǰǶǰǸǸǹǮǹ
ǵǫǵ
«
ǬǶdzDZǫǴȃdzǴ
»
3.
Ǎ
Ǚ
Ǎ
Ǎ
Ǚ
ǍǹDzǭǻǫǽ
NjǍǛ
Рис
. 3.
Последовательность
оперативных
переключений
для
формирования
ремонтной
схемы
сможет
определить
поврежденный
участок
—
между
ТП
,
в
одной
из
которых
зафиксирован
ток
КЗ
,
а
в
другой
нет
.
Если
дооснастить
индикатор
прохождения
тока
КЗ
бло
-
ком
передачи
данных
(
например
,
по
GSM-
каналу
),
ДРЭС
(
диспетчер
района
электрических
сетей
),
получив
данные
со
всех
ТП
распределительной
линии
,
может
дистанционно
определить
поврежденный
участок
и
направить
персонал
ОВБ
непосредственно
в
ближайшие
к
месту
повреждения
ТП
для
отключения
поврежденной
КЛ
и
создания
ремонтной
схемы
путем
переключений
(
рисунок
3).
12
Ежеквартальный
спецвыпуск
№
2(13),
июнь
2019
Автоматизация
электросетей
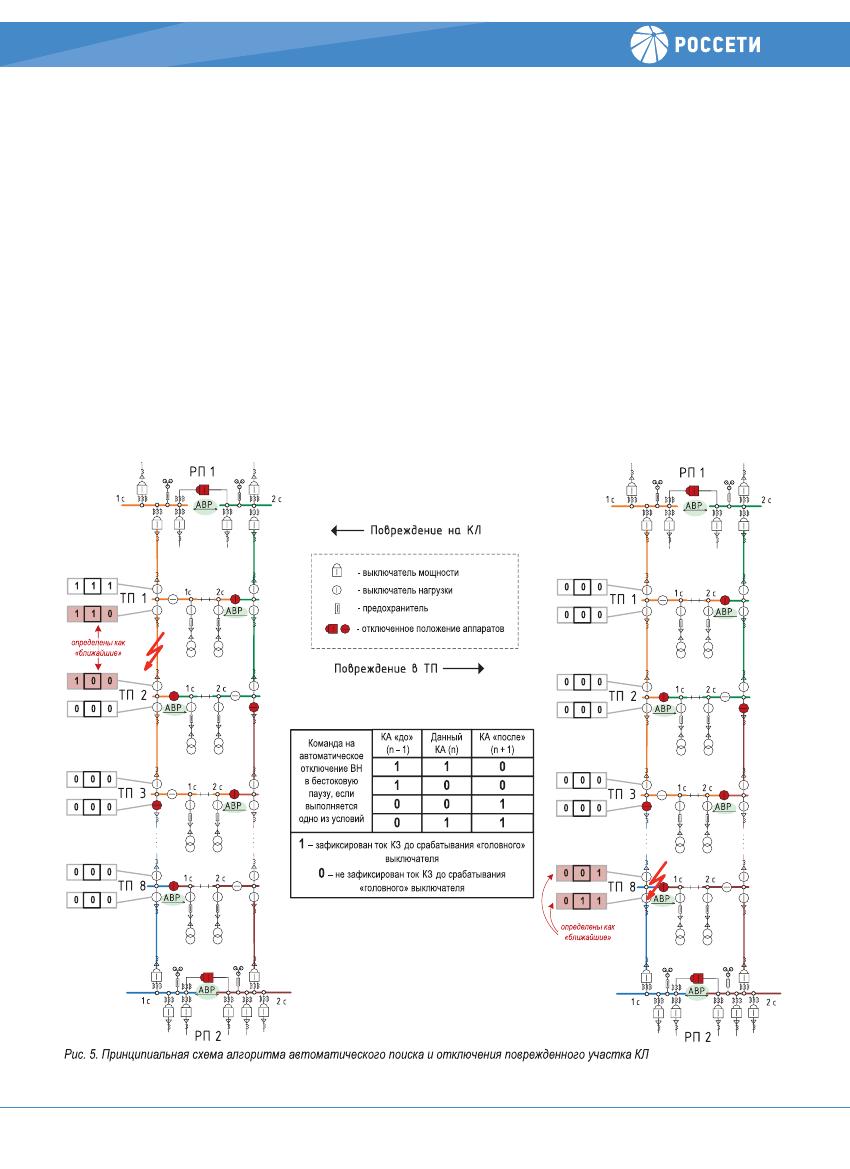
Возможны
различные
подходы
к
автоматическому
определению
и
отключению
только
поврежденного
участка
распределительной
линии
.
Можно
реализовать
алгоритм
отключения
поврежденной
КЛ
ближайшими
выключателя
-
ми
нагрузки
в
бестоковую
паузу
после
отключения
распре
-
делительной
линии
«
головным
»
выключателем
в
РП
и
до
начала
работы
АВР
в
ТП
.
Для
реализации
алгоритма
от
-
ключения
ВН
на
базе
контроллера
,
устанавливаемого
в
ТП
,
необходимо
помимо
фиксации
прохождения
токов
КЗ
на
всех
присоединениях
в
ТП
обеспечить
надежную
и
быст
-
родействующую
передачу
данных
о
прохождении
тока
КЗ
между
соседними
ТП
.
Алгоритм
обрабатывает
эти
данные
и
отключает
ВН
в
случае
,
если
через
предыдущий
ВН
за
-
фиксировано
прохождение
тока
КЗ
,
а
через
последующий
нет
(
подробно
алгоритм
описан
далее
и
проиллюстрирован
ниже
на
рисунке
5).
В
этом
случае
применительно
к
рас
-
смотренной
схеме
последовательность
коммутаций
при
отключении
поврежденной
КЛ
будет
следующей
:
13

–
при
КЗ
на
РЛ
1
между
ТП
1
и
ТП
2
с
выдержкой
времени
отключается
выключатель
РЛ
1
в
РП
1
и
нечетные
ТП
(1,
3, 5, 7)
остаются
без
напряжения
;
–
далее
автоматически
отключаются
ВН
1.5
и
ВН
2.1,
изо
-
лируя
тем
самым
поврежденный
участок
.
Вслед
за
автоматическим
отключением
поврежденного
участка
необходимо
также
до
момента
срабатывания
АВР
в
ТП
восстановить
питание
неповрежденной
части
РЛ
1
от
РП
1
и
РП
2,
то
есть
необходимо
включить
выключатель
РЛ
1
в
РП
1
и
обеспечить
автоматическое
включение
вы
-
ключателя
нагрузки
в
точке
нормального
разрыва
РЛ
1
(
ВН
3.5).
Таким
образом
,
получим
так
называемую
«
само
-
восстанавливающуюся
»
схему
—
схему
,
которая
при
воз
-
никновении
повреждения
автоматически
преобразуется
в
ремонтную
схему
(
рисунок
3).
Для
реализации
функций
«
самовосстановления
»
необходимо
фиксировать
состо
-
яние
(
положение
)
коммутационных
аппаратов
в
ТП
,
уста
-
новить
контроллер
в
РП
и
передавать
на
него
данные
о
прохождении
тока
КЗ
(
для
определения
алгоритмом
по
-
врежденного
участка
)
и
данные
о
положении
коммутацион
-
ных
аппаратов
(
для
фиксации
факта
отключения
выключа
-
телями
нагрузки
поврежденной
КЛ
).
В
случае
неуспешного
самовосстановления
(
если
за
вре
-
менную
уставку
АВР
в
ТП
питание
не
восстановилось
)
рабо
-
та
алгоритма
блокируется
и
действием
АВР
обесточенные
ТП
переводятся
на
питание
через
РЛ
2,
как
было
описано
выше
(
рисунок
2).
Таким
образом
,
АВР
становится
вспомо
-
гательным
мероприятием
,
работающим
при
неуспешности
восстановления
схемы
.
Ввиду
того
,
что
точкой
токораздела
РЛ
2
в
нормальном
режиме
является
отключенный
ВН
2.6,
после
работы
АВР
нагрузка
большей
части
ТП
(
ТП
3 —
ТП
8)
оказывается
за
-
питанной
от
РП
2
через
РЛ
2.
Можно
дополнительно
реали
-
зовать
на
базе
контроллера
в
РП
алгоритм
переноса
точки
токораздела
распределительной
линии
РЛ
2,
позволяющий
в
той
или
иной
степени
оптимизировать
загрузку
оставшей
-
ся
в
работе
питающей
линии
,
то
есть
перераспределить
ее
между
РП
1
и
РП
2.
Вообще
говоря
,
ток
однофазного
замыкания
в
сети
с
низкоомным
резистивным
заземлением
нейтрали
возмож
-
но
отключать
выключателями
нагрузки
.
Поэтому
возможно
усложнить
вышеописанный
алгоритм
и
предусмотреть
в
нем
различия
в
зависимости
от
типа
повреждения
:
–
отключение
поврежденного
участка
РЛ
ближайшими
к
месту
повреждениями
ВН
в
бестоковую
паузу
(
как
опи
-
сано
выше
) —
при
многофазных
повреждениях
;
–
отключение
поврежденного
участка
РЛ
ближайшими
к
месту
повреждениями
ВН
без
срабатывания
«
головно
-
го
»
выключателя
—
при
однофазных
.
Это
усложнит
алгоритм
,
потребует
различать
вид
КЗ
,
од
-
нако
позволит
избежать
кратковременных
отключений
части
потребителей
(
на
время
автоматических
переключений
)
при
возникновении
однофазных
замыканий
в
сети
.
АЛГОРИТМ
САМОВОССТАНОВЛЕНИЯ
На
рисунке
5
приведена
схема
участка
городской
сети
,
для
ко
-
торого
рассматривается
возможность
реализации
пилотного
проекта
автоматизации
сети
6–10
кВ
.
Далее
подробно
описан
алгоритм
определения
и
локализации
поврежденного
участка
применительно
к
данной
схеме
.
Итак
,
первый
шаг
алгоритма
—
фиксация
повреждения
.
Фиксация
повреждения
происходит
токовым
реле
,
которое
формирует
сигнал
на
отключение
выключателя
.
Выключа
-
тель
отключает
распределительную
линию
,
размыкая
свои
контакты
и
формируя
сигнал
,
являющийся
начальным
усло
-
вием
для
запуска
алгоритма
.
Следующий
шаг
—
локализация
повреждения
.
Для
ло
-
кализации
повреждения
блок
управления
(
контроллер
)
на
РП
производит
опрос
данных
с
установленных
в
сети
датчиков
для
получения
«
общей
картины
»
состояния
сети
(
нормальное
состояние
коммутационных
аппаратов
,
данные
с
индикаторов
протекания
тока
КЗ
(
ИТКЗ
/
УТКЗ
)).
Локализация
места
по
-
вреждения
преследует
цель
определения
ближайших
к
месту
повреждения
коммутационных
аппаратов
(
выключателей
на
-
грузки
или
выключателей
).
Для
описания
логики
работы
предлагаемого
алгоритма
введем
обозначение
показаний
ИТКЗ
:
1
—
зафиксирован
ток
КЗ
,
превысивший
заданную
уставку
;
0
—
не
зафиксирован
ток
КЗ
,
превысивший
заданную
уставку
.
Условием
для
определения
ближайшего
к
месту
КЗ
вы
-
ключателя
нагрузки
будет
набор
из
показаний
трех
ИТКЗ
:
ИТКЗ
предыдущего
выключателя
,
ИТКЗ
данного
выключате
-
ля
и
ИТКЗ
следующего
выключателя
.
Например
,
на
рисун
-
ке
4
для
принятия
решения
,
является
ли
ВН
2.1
ближайшим
к
месту
КЗ
,
анализируются
показания
[
ИТКЗ
ВН
1.5;
ИТКЗ
ВН
2.1;
ИТКЗ
ВН
2.5].
Выключатель
нагрузки
«
n
»
определя
-
ется
как
ближайший
к
месту
повреждения
,
если
комбинация
показаний
[
ИТКЗ
(
n
– 1);
ИТКЗ
n
;
ИТКЗ
(
n
+ 1)]
для
него
совпа
-
дает
с
одной
из
: [1; 1; 0], [0; 1; 1], [1; 0; 0], [0; 0; 1].
Выклю
-
чатель
в
РП
определяется
как
ближайший
к
месту
повреж
-
дения
,
если
[
ИТКЗ
(
n
– 1);
ИТКЗ
n
]
или
[
ИТКЗ
n
;
ИТКЗ
(
n
+ 1)]
совпадает
с
[1; 0], [0; 1].
Следующий
шаг
алгоритма
—
отключение
поврежден
-
ной
КЛ
.
Когда
повреждение
локализовано
,
то
есть
опреде
-
лены
ближайшие
к
месту
повреждения
коммутационные
аппараты
,
на
них
подается
сигнал
на
отключение
.
Причем
сигнал
на
отключение
можно
формировать
как
центральным
контроллером
в
РП
,
так
и
контроллерами
в
ТП
(
достаточно
передавать
в
них
показания
ИТКЗ
(0
или
1)
с
соседних
ТП
).
Финальный
шаг
—
восстановление
питания
ТП
посред
-
ством
включения
выключателя
в
РП
и
нормально
разомкнутого
выключателя
(
в
случае
,
если
он
не
определен
как
ближайший
к
месту
повреждения
).
Восстановление
питания
происходит
следующим
образом
по
факту
выполнения
условий
:
–
отключены
ближайшие
к
месту
повреждения
коммута
-
ционные
аппараты
(
которым
соответствуют
комбинации
измерений
[1; 1; 0]
и
[1; 0; 0]
или
[0; 0; 1]
и
[0; 1; 1]),
14
Ежеквартальный
спецвыпуск
№
2(13),
июнь
2019
Автоматизация
электросетей
–
время
после
отключения
головного
выключателя
дей
-
ствием
защит
не
превысило
временную
уставку
АВР
;
–
на
все
коммутационные
аппараты
распределительной
линии
,
кроме
определенных
как
ближайшие
к
месту
повреждения
,
подается
сигнал
на
их
включение
.
Выключатели
[1; 1; 0]
и
[1; 0; 0]
или
[0; 0; 1]
и
[0; 1; 1],
в
свою
очередь
,
отключены
с
запретом
включения
действи
-
ем
автоматики
.
Алгоритм
самовосстановления
прост
,
потому
как
работа
-
ет
одинаково
эффективно
как
при
повреждениях
на
кабеле
,
так
и
на
шинах
ТП
(
рисунок
5).
Независимо
от
выбранного
алгоритма
отключения
по
-
врежденного
участка
для
реализации
функций
автомати
-
зации
требуется
модернизация
ячеек
РУ
10(6)
кВ
ТП
с
ВН
,
то
есть
оснащение
моторизированными
приводами
комму
-
тируемых
автоматикой
ВН
,
установки
исполнительных
ор
-
ганов
и
организации
каналов
передачи
данных
между
ТП
и
РП
.
Для
осуществления
автоматической
дистанционной
коммутации
выключатели
нагрузки
отходящей
и
питающей
КЛ
типа
ВНМ
-10
и
ВН
-16
должны
иметь
привод
с
электро
-
магнитом
отключения
.
Наличие
электромагнита
отключения
при
взведенном
(
включенном
)
состоянии
ВН
позволяет
соз
-
дать
схему
управления
,
в
которой
по
сигналу
может
быть
осуществлено
замыкание
цепи
электромагнита
отключения
с
последующим
действием
приводного
механизма
на
от
-
ключение
главных
контактов
выключателя
нагрузки
,
после
чего
для
обеспечения
возможности
последующей
коммута
-
ции
данного
КА
необходимо
осуществить
взвод
пружинного
механизма
.
ПОСТАНОВКА
ЗАДАЧИ
ОПРЕДЕЛЕНИЯ
ОПТИМАЛЬНОГО
ЧИСЛА
ПУНКТОВ
АВТОМАТИЗАЦИИ
Полное
самовосстановление
возможно
,
если
автоматизи
-
рованы
все
узлы
на
распределительной
линии
,
то
есть
все
ТП
оборудованы
коммутационными
аппаратами
с
возмож
-
ностью
дистанционного
отключения
от
действия
автоматики
(
либо
дистанционного
включения
,
если
речь
идет
о
комму
-
15
тационном
аппарате
в
точке
нормального
разрыва
распре
-
делительной
линии
(
РЛ
),
а
также
соответствующими
датчи
-
ками
и
устройствами
сбора
и
передачи
данных
(
УСПД
)
или
контроллерами
.
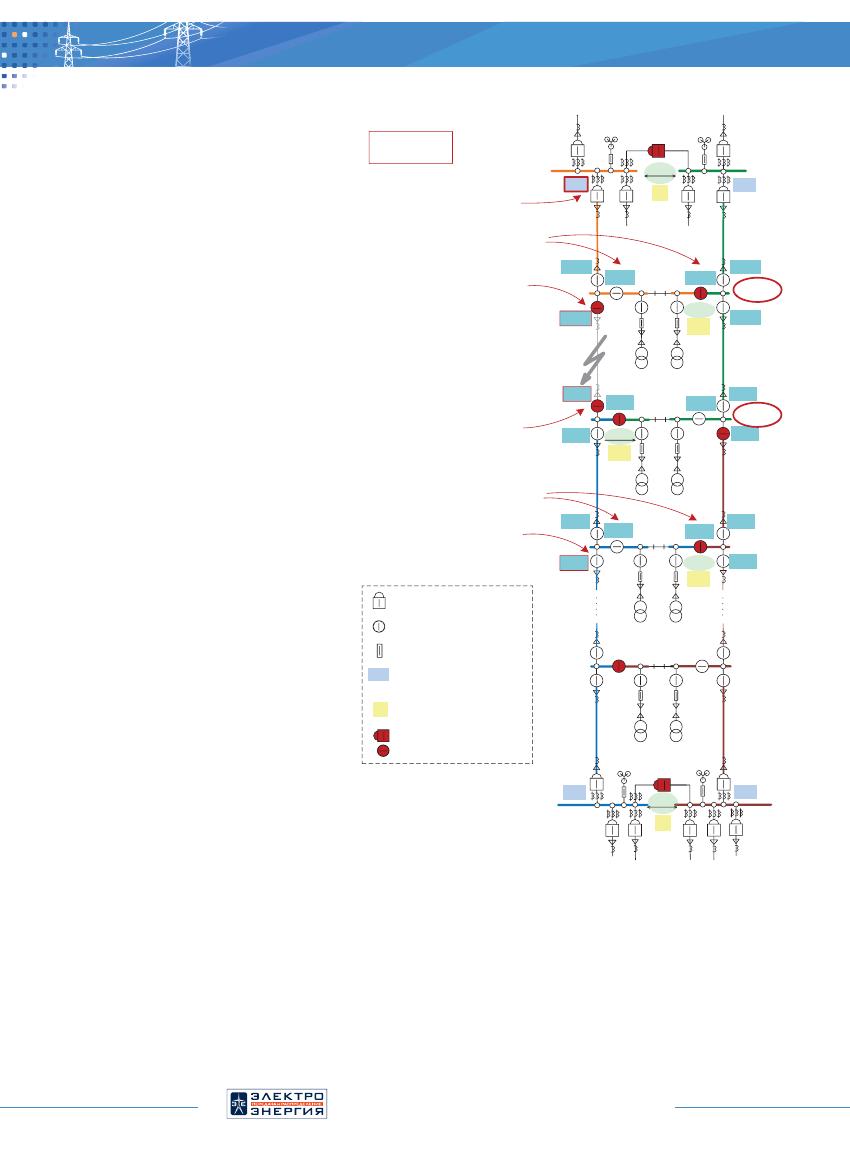
Если
же
автоматизированы
не
все
ТП
,
а
,
на
-
пример
,
половина
,
то
самовосстановление
тоже
возможно
,
однако
не
в
полном
объеме
:
то
есть
электроснабжение
большей
части
потребителей
все
же
сможет
восстанавли
-
ваться
в
автоматическом
режиме
,
но
некоторая
часть
будет
оставаться
отключенной
до
принятия
мер
оперативным
пер
-
соналом
, —
такой
случай
проиллюстрирован
на
рисунке
6.
Увеличение
числа
пунктов
автоматизации
(
автоматизи
-
руемых
ТП
)
очевидным
образом
повышает
селективность
самовосстановления
—
повреждение
локализуется
более
точно
,
сокращается
число
отключенных
элементов
в
после
-
аварийной
схеме
.
Определение
оптимального
числа
пунктов
автоматизации
—
технико
-
экономическая
задача
,
которая
должна
решаться
в
процессе
проектирования
САУ
.
Далее
в
статье
показа
-
но
влияние
числа
пунктов
автоматизации
на
повыше
-
ние
надежности
электро
-
снабжения
потребителей
на
примере
участка
город
-
ской
распределительной
сети
ПАО
«
Ленэнерго
».
На
рисунке
7
пред
-
ставлен
рассматриваемый
участок
сети
.
Это
неавто
-
матизированная
преимуще
-
ственно
однолучевая
схема
электроснабжения
одиннад
-
цати
ТП
6
кВ
в
районе
исто
-
рического
центра
.
Схема
представляет
собой
одну
РЛ
с
питанием
со
стороны
РП
1
и
возможностью
резервного
питания
со
стороны
РП
2.
То
есть
,
в
нормальном
режиме
все
11
ТП
запитаны
от
РП
1.
На
присоединении
со
сторо
-
ны
РП
2
в
ТП
11
установлен
нормально
разомкнутый
разъединитель
.
Со
стороны
РП
1
уста
-
новлен
масляный
выключа
-
тель
с
ручным
автоматиче
-
ским
приводом
типа
ПРБА
,
позволяющим
производить
отключение
вручную
,
дис
-
ТП
...
...
...
...
...
...
...
РП
РП
ТП
ТП
ТП
ТП
ТП
...
...
...
...
...
...
...
РП
РП
ТП
ТП
ТП
ТП
ТП
...
...
...
...
...
...
...
РП
РП
ТП
ТП
ТП
ТП
ТП
...
...
...
...
...
...
...
РП
РП
ТП
ТП
ТП
ТП
1.
2.
3.
4.
Рис
. 6.
Частичное
самовосстановление
при
автоматизации
половины
от
общего
числа
объектов
АВР
РП
2
АВР
ТП
1
АВР
ТП
2
ТП
3
ТП
4
ТП
5
ТП
6
ТП
8
ТП
9
ТП
10
ТП
11
...
...
...
...
...
...
...
-
предохранитель
-
выключатель
мощности
-
выключатель
нагрузки
-
разъединитель
...
АВР
АВР
-
ИТКЗ
...
...
ТП
7
РП
1
Рис
. 7.
Схема
исследуемого
участка
электрической
сети
16
Ежеквартальный
спецвыпуск
№
2(13),
июнь
2019
Автоматизация
электросетей
танционно
и
автоматически
.
Однако
для
того
чтобы
вклю
-
чить
привод
после
автоматического
отключения
,
необходим
взвод
пружины
вручную
(
то
есть
при
автоматизации
РП
1
ап
-
парат
должен
быть
заменен
).
Со
стороны
РП
2
выключатель
оснащен
пружинным
приводом
с
возможностью
автоматиче
-
ского
взвода
.
Среди
всех
11
ТП
только
в
двух
(
ТП
1
и
ТП
3)
на
кабель
-
ных
присоединениях
стоят
ВН
с
пружинными
приводами
,
обеспечивающими
возможность
дистанционного
управле
-
ния
при
условии
предварительного
взвода
пружины
.
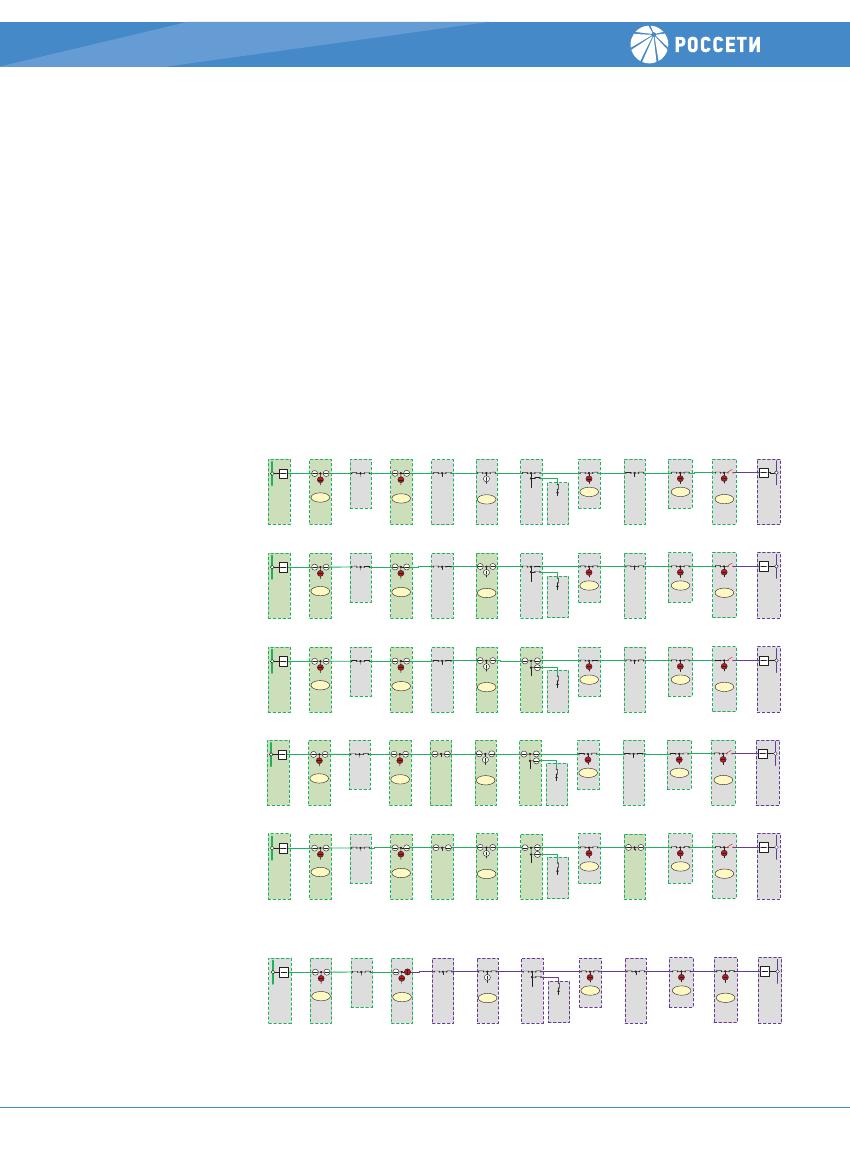
Рассмотрены
следующие
варианты
автоматизации
схе
-
мы
,
проиллюстрированные
на
рисунке
8 (
зеленым
отмечены
автоматизируемые
ТП
):
•
Вариант
1 —
автоматизация
ТП
1
и
ТП
3
без
замены
коммутационного
аппарата
(
КА
),
автоматизация
РП
1
с
заменой
КА
на
рассматриваемом
присоединении
.
•
Вариант
2 —
автоматизация
ТП
1
и
ТП
3
без
замены
КА
,
автоматизация
РП
1
с
заменой
КА
на
рассматриваемом
присоединении
,
автома
-
тизация
ТП
5
с
заменой
КА
на
линейных
присо
-
единениях
.
•
Вариант
3 —
автомати
-
зация
ТП
1
и
ТП
3
без
замены
КА
,
автоматиза
-
ция
РП
1
с
заменой
КА
на
рассматриваемом
присоединении
,
авто
-
матизация
ТП
5
и
ТП
6
с
заменой
КА
на
линей
-
ных
присоединениях
.
•
Вариант
4 —
автомати
-
зация
ТП
1
и
ТП
3
без
замены
КА
,
автоматиза
-
ция
РП
1
с
заменой
КА
на
рассматриваемом
присоединении
,
а
также
автоматизация
ТП
5,
ТП
6,
ТП
4
с
заменой
КА
на
линейных
присо
-
единениях
.
•
Вариант
5 —
автомати
-
зация
ТП
1
и
ТП
3
без
замены
КА
,
автомати
-
зация
РП
1
с
заменой
КА
на
рассматривае
-
мом
присоединении
,
а
также
автоматизация
ТП
5,
ТП
6,
ТП
4
и
ТП
9
с
за
меной
КА
на
линей
-
ных
присоединениях
.
Несмотря
на
увеличение
числа
пунктов
автоматиза
-
ции
,
функции
самовосстановления
в
схемах
,
показанных
на
рисунке
4,
ограничены
односторонним
питанием
РЛ
.
Двусто
-
роннее
питание
может
быть
организовано
посредством
пе
-
реноса
точки
нормального
разрыва
с
разъединителя
в
ТП
11
на
ВН
в
ТП
3
в
сторону
ТП
4,
как
показано
на
рисунке
9.
Все
пять
описанных
выше
вариантов
автоматизации
рассмотрены
также
для
двусторонней
схемы
питания
РЛ
(
со
стороны
РП
1
и
РП
2),
полученной
в
результате
переноса
точки
нормального
разрыва
.
ОЦЕНКА
ВЛИЯНИЯ
ИЗМЕНЕНИЯ
ЧИСЛА
ПУНКТОВ
АВТОМАТИЗАЦИИ
НА
НАДЕЖНОСТЬ
ЭЛЕКТРОСНАБЖЕНИЯ
В
условиях
принятого
ПАО
«
Ленэнерго
»
тренда
на
перевод
кабельных
городских
сетей
СН
на
низкоомное
резистивное
заземление
нейтрали
и
с
учетом
[3, 5]
при
оценке
надеж
-
ности
принято
,
что
участок
сети
эксплуатируется
в
режиме
резистивного
заземления
нейтрали
(
то
есть
фиксируются
...
ТП
10
АВР
...
ТП
11
АВР
ТП
9
...
ТП
1
...
...
...
...
...
РП
1
ТП
2
ТП
3
ТП
4
ТП
5
...
РП
2
ТП
6
...
АВР
АВР
АВР
...
...
ТП
7
...
ТП
8
АВР
...
ТП
10
АВР
...
ТП
11
АВР
ТП
9
...
ТП
1
...
...
...
...
...
РП
1
ТП
2
ТП
3
ТП
4
ТП
5
...
РП
2
ТП
6
...
АВР
АВР
АВР
...
...
ТП
7
...
ТП
8
АВР
...
ТП
10
АВР
...
ТП
11
АВР
ТП
9
...
ТП
1
...
...
...
...
...
РП
1
ТП
2
ТП
3
ТП
4
ТП
5
...
РП
2
ТП
6
...
АВР
АВР
АВР
...
...
ТП
7
...
ТП
8
АВР
...
ТП
10
АВР
...
ТП
11
АВР
ТП
9
...
ТП
1
...
...
...
...
...
РП
1
ТП
2
ТП
3
ТП
4
ТП
5
...
РП
2
ТП
6
...
АВР
АВР
АВР
...
...
ТП
7
...
ТП
8
АВР
...
ТП
10
АВР
...
ТП
11
АВР
ТП
9
...
ТП
1
...
...
...
...
...
РП
1
ТП
2
ТП
3
ТП
4
ТП
5
...
РП
2
ТП
6
...
АВР
АВР
АВР
...
...
ТП
7
...
ТП
8
АВР
1.
2.
3.
4.
5.
Рис
. 8.
Рассмотренные
варианты
автоматизации
(
зеленой
заливкой
отмечены
автоматизируе
-
мые
ТП
)
Рис
. 9.
Организация
двустороннего
питания
посредством
переноса
точки
нормального
разрыва
РЛ
из
ТП
11
в
ТП
3
...
ТП
10
АВР
...
ТП
11
АВР
ТП
9
...
ТП
1
...
...
...
...
РП
1
ТП
2
ТП
3
ТП
4
ТП
5
...
РП
2
ТП
6
...
АВР
АВР
АВР
...
...
ТП
7
...
ТП
8
АВР
17
и
отключаются
как
однофазные
,
так
и
многофазные
повреж
-
дения
).
Коэффициент
SAIFI
устанавливает
среднее
количество
долговременных
аварийных
прерываний
электроснабжения
потребителей
(
в
год
).
Математическое
описание
SAIFI
фор
-
мулируется
следующим
образом
[7]:
1
ns
SAIFI
=
—
[
i
l
i
N
j
], (1)
N
T
i
= 1
j
i
где
N
T
—
количество
потребителей
,
получающих
электропи
-
тание
от
рассматриваемого
участка
сети
;
ns
—
количество
участков
РЛ
;
l
i
—
длина
участка
,
км
;
i
—
вероятностный
по
-
казатель
аварий
на
участке
i
,
количество
аварий
в
год
/
км
;
N
j
—
количество
потребителей
на
участке
j
;
i
—
множе
-
ство
,
сформированное
участками
сети
,
для
которых
авария
на
участке
i
приводит
к
длительным
перебоям
электроснаб
-
жения
.
Согласно
(1), SAIFI
определя
-
ется
как
отношение
суммарного
количества
аварийно
отключен
-
ных
потребителей
(
за
год
)
к
об
-
щему
количеству
потребителей
.
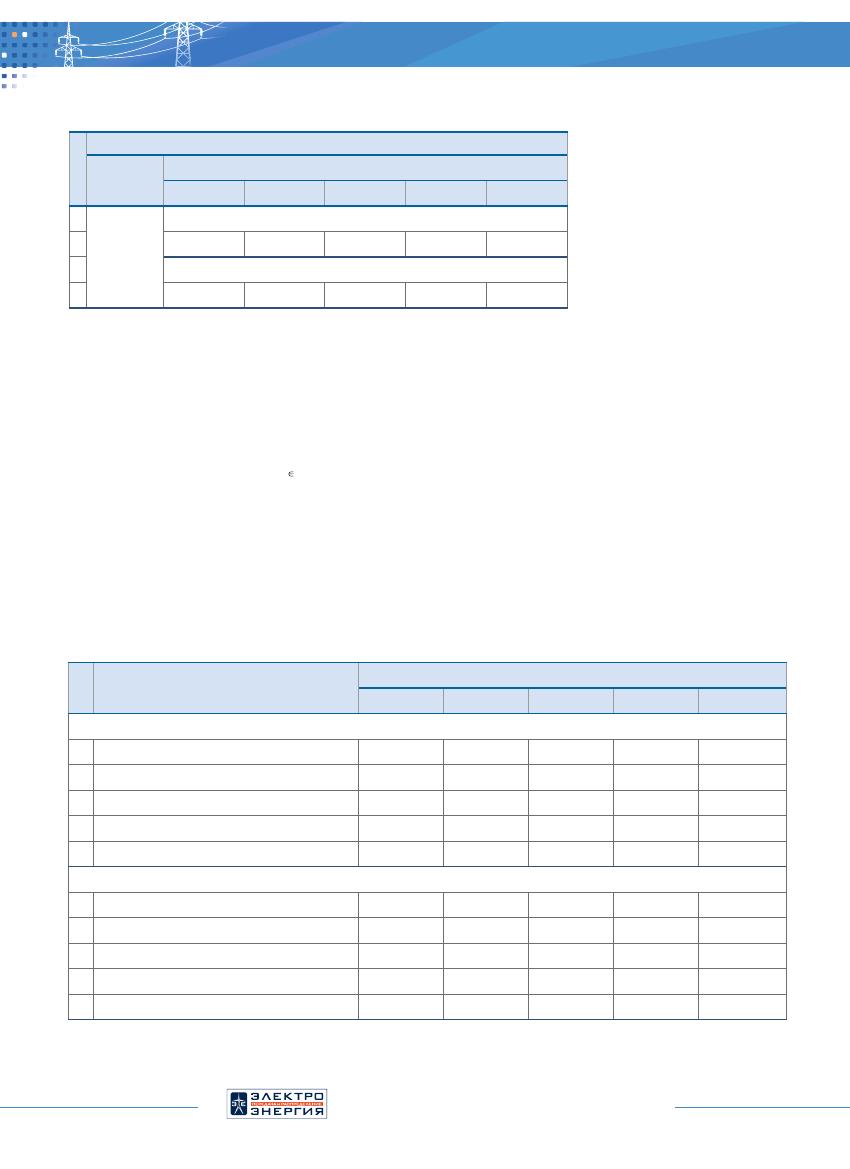
Результаты
расчета
SAIFI
приведены
в
таблице
1.
С
увели
-
чением
числа
пунктов
автомати
-
зации
частота
продолжительных
перерывов
электроснабжения
снижается
,
однако
эффект
от
каждого
дополнительного
пункта
автоматизации
относительно
предыдущего
уменьшается
.
СООТНЕСЕНИЕ
ПОВЫШЕНИЯ
НАДЕЖНОСТИ
С
ТРЕБУЕМЫМИ
КАПИТАЛЬНЫМИ
ЗАТРАТАМИ
В
таблице
2
соотнесены
расчетные
показатели
надежности
для
рассмотренных
вариантов
автоматизации
и
результаты
укрупненной
оценки
капитальных
вложений
,
необходимых
для
их
реализации
.
Из
данных
таблицы
видно
,
что
реконфигурация
сети
с
организацией
двустороннего
питания
в
значительно
большей
степени
оказывает
влияние
на
повышение
эф
-
фективности
решений
по
автоматизации
,
нежели
увеличе
-
ние
числа
пунктов
автоматизации
с
заменой
коммутацион
-
ных
аппаратов
.
Следует
отметить
,
что
немаловажным
параметром
при
определении
оптимального
числа
пунктов
автомати
-
Табл
. 1.
Динамика
изменения
SAIFI
в
зависимости
от
варианта
автоматизации
Значение
SAIFI
Без
авто
-
матизации
С
различной
степенью
автоматизации
Вариант
1
Вариант
2
Вариант
3
Вариант
4
Вариант
5
1
0,651
Без
переноса
нормального
разрыва
2
0,424
0,362
0,274
0,260
0,238
3
С
учетом
двустороннего
питания
РЛ
4
0,319
0,205
0,102
0,084
0,046
Табл
. 2.
Анализ
изменения
надежности
по
отношению
к
объемам
капитальных
вложений
*
С
различной
степенью
автоматизации
Вариант
1
Вариант
2
Вариант
3
Вариант
4
Вариант
5
Без
переноса
нормального
разрыва
1
Капитальные
затр
аты
с
НДС
,
тыс
.
руб
.
12 015
18 686
28 042
34 421
40 800
2
(
к
предыдущему
)
–
56%
50%
23%
19%
3
Изменение
SAIFI
по
отношению
к
исходному
0,227
0,289
0,376
0,390
0,413
4
(
к
предыдущему
)
–
27%
30%
4%
6%
5
Стоимость
измене
ния
SAIFI
на
0,01
ед
.,
тыс
.
руб
.
530
647
745
882
988
С
учетом
двустороннего
питания
РЛ
6
Капитальные
затр
аты
с
НДС
,
тыс
.
руб
.
18 741
25 412
34 768
41 442
47 526
7
(
к
предыдущему
)
–
36%
37%
19%
15%
8
Изменение
SAIFI
по
отношению
к
исходному
0,332
0,446
0,549
0,566
0,604
9
(
к
предыдущему
)
–
34%
23%
3%
7%
10
Стоимость
измене
ния
SAIFI
на
0,01
ед
.,
тыс
.
руб
.
564
569,6
633,1
732
786
*
Расчет
стоимостных
показателей
выполнен
в
рамках
НИР
«
Разработка
автоматизированной
системы
управления
городскими
распределительными
ка
-
бельными
сетями
6–10
кВ
»,
выполненной
АО
«
НТЦ
ЕЭС
»
для
ПАО
«
Ленэнерго
».
При
расчете
затрат
не
учтена
прокладка
ВОЛС
,
предполагается
использо
-
вание
GSM-
каналов
связи
.
Учитывалась
установка
УТКЗ
только
в
автоматизируемых
ТП
.
18
Ежеквартальный
спецвыпуск
№
2(13),
июнь
2019
Автоматизация
электросетей

зации
является
целевая
надежность
электроснабжения
—
то
есть
целевые
значения
показателей
надежности
элек
-
троснабжения
потребителей
.
Так
,
если
сокращения
SAIFI
для
рассматриваемого
участка
на
0,3
ед
.
достаточно
для
попадания
в
целевую
область
,
то
приоритетным
следует
считать
автоматизацию
ТП
1
и
ТП
3 (
не
требует
замены
КА
)
с
организацией
двустороннего
питания
посредством
пере
-
носа
точки
нормального
разрыва
из
ТП
11
в
ТП
3.
Дополни
-
тельные
инвестиции
в
размере
7
млн
руб
.,
требуемые
для
снижения
данного
показателя
еще
на
0,1
ед
.,
будут
эконо
-
мически
не
оправданными
.
Таким
образом
,
для
определения
требуемого
числа
пунктов
автоматизации
конкретной
РЛ
при
проектирова
-
нии
необходимо
производить
расчеты
показателей
на
-
дежности
(
с
учетом
реального
состава
нагрузки
)
и
раз
-
меров
требуемых
капитальных
вложений
и
выбирать
вариант
,
исходя
из
критериев
минимизации
стоимости
единицы
изменения
надежности
и
стремления
к
достиже
-
нию
целевых
показателей
.
ЗАКЛЮЧЕНИЕ
Простая
и
надежная
релейная
защита
от
ОЗЗ
всей
распре
-
делительной
сети
6–10
кВ
может
быть
построена
только
при
низкоомном
резистивном
заземлении
нейтрали
.
Параллельно
с
программой
перехода
на
низкоомное
ре
-
зистивное
заземление
нейтрали
в
кабельной
сети
ПАО
«
Лен
-
энерго
»
для
автоматизации
поиска
повреждений
реализует
-
ся
программа
по
оснащению
РУ
6–10
кВ
УТКЗ
.
Дальнейшая
автоматизация
сети
6–10
кВ
с
выбором
оптимального
алгоритма
—
комплексная
задача
,
решение
которой
должно
учитывать
возможность
развития
сети
,
раз
-
личные
режимы
ее
работы
в
нормальной
и
ремонтных
схе
-
мах
,
надежность
ее
функционирования
,
многообразие
обо
-
рудования
,
схемные
и
компоновочные
решения
,
принятые
в
сетевой
компании
.
Предложенный
в
статье
подход
к
автоматизации
двух
-
лучевой
с
двусторонним
питанием
схемы
может
быть
реа
-
лизован
поэтапно
.
Участки
существующей
кабельной
сети
6–10
кВ
,
построенной
на
морально
и
физически
устаревшем
оборудовании
,
где
не
представляется
возможным
дистанци
-
онное
управление
приводами
коммутационных
аппаратов
(
например
,
разъединители
и
ВН
с
ручными
приводами
),
мо
-
гут
быть
автоматизированы
частично
:
–
перевод
на
низкоомное
резистивное
заземление
нейтра
-
ли
;
–
установка
устройств
,
фиксирующих
прохождение
тока
КЗ
;
–
организация
передачи
данных
о
прохождении
тока
КЗ
диспетчеру
района
кабельной
сети
(
например
,
по
GSM-
каналу
)
для
однозначного
определения
поврежденного
участка
.
Сеть
,
оборудованная
выключателями
нагрузки
с
мото
-
ризованными
приводами
либо
с
пружинными
приводами
,
оснащенными
электромагнитом
отключения
,
может
быть
ав
-
томатизирована
полностью
только
при
условии
организации
передачи
данных
между
ТП
и
РП
по
ВОЛС
.
Определение
оптимального
числа
пунктов
автоматиза
-
ции
—
технико
-
экономическая
задача
,
которая
должна
ре
-
шаться
в
процессе
проектирования
САУ
индивидуально
для
каждой
конкретной
схемы
сети
.
Индивидуальность
решений
заключается
не
только
в
различном
их
влиянии
на
повы
-
шение
надежности
,
но
и
в
различных
объемах
капитальных
вложений
,
требуемых
для
автоматизации
разных
типов
схем
ТП
.
Так
в
случае
,
если
ТП
построена
на
базе
ячеек
типа
RM6
или
КСО
с
ВН
,
оснащенными
либо
пружинными
приводами
с
возможностью
дистанционного
отключения
,
либо
мотори
-
зованными
приводами
,
размер
капитальных
вложений
ми
-
нимален
и
включает
в
себя
только
стоимости
вторичных
си
-
стем
(
программно
-
аппаратная
реализация
,
средства
связи
).
Если
же
в
качестве
основного
коммутационного
аппара
-
та
в
ТП
используются
разъединители
или
ВН
с
ручным
при
-
водом
,
то
автоматизация
потребует
значительных
затрат
,
обусловленных
заменой
коммутационных
аппаратов
.
Сопо
-
ставляя
объемы
требуемых
затрат
c
изменением
показате
-
лей
надежности
,
можно
определить
какое
число
ТП
в
схеме
действительно
имеет
смысл
автоматизировать
.
Предложенный
в
статье
подход
к
автоматизации
ка
-
бельной
сети
6–10
кВ
с
наделением
ее
функциями
само
-
восстановления
позволит
решить
задачу
по
улучшению
ха
-
рактеристик
надежности
электроснабжения
потребителей
,
поставленную
в
утвержденной
ПАО
«
Россети
»
концепции
«
Цифровая
трансформация
2030» [8].
ЛИТЕРАТУРА
1. Coster E.J., Kerstens W.C.M.,O. Schroe-
del “Implementation of an Automatic FLIR-
scheme in a 20 kV Distribution Grid”, 2014,
6 p.
2. Northcote-Green J., Wilson R. Control and
Automation of Electric Power Distribution
Systems, CRC Press, 2007, 490 p.
3.
Евдокунин
Г
.
А
.,
Титенков
С
.
С
.
Рези
-
стивное
заземление
нейтрали
сетей
6–35
кВ
.
СПб
.:
Терция
, 2009. 188
с
.
4.
Руководство
по
эксплуатации
устрой
-
ства
поиска
повреждений
УПП
-10
ЗАО
«
Техношанс
».
Минск
, 2006. 48
с
.
5.
СТО
18-2013.
Руководящие
указания
по
выбору
режима
заземления
нейтра
-
ли
в
электрических
сетях
напряжением
6–35
кВ
.
ПАО
«
Ленэнерго
».
СПб
., 2013.
77
с
.
6.
Кузьмин
И
.
А
.,
Магдеев
Н
.
Н
.,
Евдоку
-
нин
Г
.
А
.,
Брилинский
А
.
С
.,
Грунина
О
.
И
.
Переход
к
резистивному
заземлению
нейтрали
в
сети
6–10
кВ
ПАО
«
Ленэнер
-
го
»
как
шаг
на
пути
к
автоматизации
//
Спецвыпуск
журнала
«
ЭЛЕКТРОЭНЕР
-
ГИЯ
.
Передача
и
распределение
», 2018,
№
3(10).
С
. 18–24.
7. Ferreira G.D., Bretas A.S., Cardoso G.Jr.
Optimal Distribution Protection Design
Considering Momentary and Sustained
Reliability Indices. MEPS'10 Symposium,
Wroclaw University of Technology, Wro-
claw, Poland, 20-22 September 2010, 8 p.
8.
Концепция
«
Цифровая
трансформация
2030».
Утверждена
Советом
директоров
ПАО
«
Россети
» 21.12.2018.
19
Оригинал статьи: Самовосстановление в кабельных электрических сетях 6–10 кВ
В зарубежной практике в отношении сетей среднего напряжения, где процессы определения, локализации и отключения поврежденного участка и восстановления питания потребителей полностью автоматизированы, применяется термин selfhealing, что означает «самовосстанавливающиеся». В настоящей статье предложен подход к автоматизации кабельной сети 6–10 кВ с наделением ее функциями самовосстановления. На примере участка городской распределительной сети 10(6) кВ показано каким образом внедрение функции самовосстановления влияет на изменение SAIFI при различном числе автоматизируемых трансформаторных подстанций в схеме. Кроме того, величина относительного снижения средней частоты продолжительных отключений от увеличения числа автоматизируемых трансформаторных подстанций сопоставлена с дополнительным увеличением капитальных затрат, сделаны выводы относительно определения предпочтительного числа пунктов автоматизации.