46
АНАЛИТИКА
СЕТИ РОССИИ
46
р
о
б
о
т
ы
в
с
е
т
я
х
роботы в сетях
—
Александр
,
расскажите
,
пожалуйста
,
о
Вашем
проекте
так
,
если
бы
он
сейчас
был
в
работе
.
—
Мы
разрабатываем
роботизированный
комплекс
для
диагностики
высоковольтных
воз
-
душных
линий
электропередачи
(
ВЛ
) — «
Кана
-
тоход
» (
рис
. 1).
Комплекс
будет
осуществлять
комплексную
инженерную
инструментальную
диагностику
ВЛ
.
Мы
объединили
орла
и
ужа
—
орёл
взлетает
,
стыкуется
с
силовым
проводом
линии
электропередачи
,
дальше
по
ней
ползёт
уж
и
проводит
необходимый
контроль
.
Если
бу
-
дет
дефект
—
наше
устройство
обнаружит
его
и
предотвратит
системную
аварию
.
—
В
чём
заключается
суть
и
уникальность
Вашего
проекта
?
—
Проект
предполагает
объединение
лета
-
ющего
и
мобильного
роботов
для
выполнения
комплексного
контроля
ВЛ
.
Летающий
робот
мо
-
жет
быстро
и
по
кратчайшему
пути
достичь
лю
-
бого
места
ВЛ
.
В
России
более
2,5
млн
киломе
-
тров
линий
электропередачи
,
которые
требуют
постоянного
контроля
их
состояния
.
Сегод
-
ня
используется
визуальный
,
как
правило
,
пеший
осмотр
.
Монтажник
в
бинокль
пытается
найти
дефект
на
высоте
более
20
метров
.
Иногда
это
получа
-
ется
.
Более
эффективным
являет
-
ся
инженерный
инструменталь
-
ный
осмотр
с
использованием
специальных
диагностических
приборов
.
Однако
эти
приборы
дорогостоящие
,
требуют
высо
-
кой
квалификации
и
времени
проведения
диагностики
.
По
-
этому
эти
осмотры
,
как
прави
-
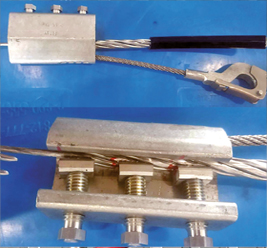
Роботизированный
комплекс «Канатоход»
Команда из Уральского федерального университета с
проектом роботизированного комплекса для диагно-
стики ВЛ «Канатоход» победила в 2014 году в конкур-
се ОАО «Россети» «Энергопрорыв — от идеи до вне-
дрения», а в апреле 2015 года представила свой проект
на всемирной выставке промышленности и иннова-
ций Hannover Messe 2015, в ходе которой российскими
технологиями заинтересовалось множество компаний
из ЕС, США, Индии, Китая, Бразилии и других стран.
О проекте «Канатоход» рассказывает его руководитель
Александр ЛЕМЕХ из Уральского федерального уни-
верситета (УрФУ), кафедра «Подъёмно-транспортные машины и роботы» Меха-
нико-машиностроительного института.
Рис
. 1.
Роботизированный
комплекс
для
диагностики
ВЛ
«
Канатоход
» Cablewalker.com
47
№
3 (30),
май
–
июнь
, 2015
47
ло
,
точечные
.
Также
более
эффективным
является
осмотр
с
подъёмом
на
опору
,
но
он
значительно
бо
-
лее
сложен
и
в
большинстве
случаев
требует
отклю
-
чения
ВЛ
,
а
главное
,
связан
со
смертельным
риском
из
-
за
высокого
напряжения
и
работ
на
высоте
.
Наш
«
Канатоход
»
предназначен
для
выполне
-
ния
комплексного
инженерного
инструментального
верхового
осмотра
,
который
может
быть
в
10
раз
эффективнее
и
дешевле
аналогичного
осмотра
с
земли
.
Благодаря
этому
возможно
существенно
по
-
высить
эффективность
технического
обслуживания
ВЛ
и
,
как
следствие
,
снизить
аварийность
и
потери
электроэнергии
в
электрических
сетях
.
Благодаря
этому
комплексу
система
так
называ
-
емых
«
умных
сетей
» (Smart Grid),
которая
в
данный
момент
активно
обсуждается
профессиональным
сообществом
,
может
получить
отличный
источник
информации
о
техническом
состоянии
сетей
.
Сегодня
для
диагностики
ВЛ
также
используют
летательные
аппараты
,
как
пилотируемые
,
так
и
беспилотники
.
Они
,
как
правило
,
летят
на
большой
скорости
(
более
80
км
/
ч
)
на
средней
высоте
и
,
обыч
-
но
используя
видеокамеру
и
тепловизор
,
стремятся
выявить
крупные
дефекты
ВЛ
.
Однако
их
примене
-
ние
ограничено
вследствие
того
,
что
они
не
дают
нужную
инженерную
информацию
,
а
только
отчасти
помогают
выявить
наиболее
проблемные
зоны
ВЛ
.
Для
классификации
определённых
видов
дефектов
нужно
внимательно
рассмотреть
объект
со
всех
сто
-
рон
.
Эти
устройства
часто
дают
только
картинку
,
ко
-
торую
сложно
использовать
в
инженерной
практике
эксплуатации
и
технического
обслуживания
ВЛ
.
—
Как
возникла
идея
создания
подобного
нов
-
шества
?
Это
была
абстрактная
идея
или
необхо
-
димость
?
—
В
Уральском
федеральном
университете
мной
был
основан
Клуб
по
развитию
робототехники
,
в
рамках
которого
объединились
энтузиасты
этого
на
-
правления
самых
разных
специальностей
и
возрас
-
тов
.
В
нашей
команде
было
несколько
человек
,
кото
-
рые
делали
дирижабли
.
В
данный
момент
у
нас
есть
дирижабль
объёмом
6
м
3
.
От
представителя
Немецкого
объединения
инсти
-
тутов
прикладных
исследований
им
.
Фраунгофера
в
клуб
поступило
письмо
,
в
котором
нам
предложили
участвовать
в
крупном
интеграционном
европейском
проекте
в
рамках
Седьмой
рамочной
программы
Ев
-
ропейского
союза
—
НИФТИ
.
Проект
предполагал
создание
роботизированного
комплекса
для
опера
-
ций
спасения
,
состоящего
из
группы
летающих
робо
-
тов
,
группы
наземных
роботов
и
штаба
управления
.
Мы
заинтересовались
этим
предложением
и
прошли
серию
стажировок
в
этом
институте
.
Там
мы
узнали
,
что
в
проекте
НИФТИ
участву
-
ют
12
партнёров
со
всего
Европейского
союза
—
Институт
искусственного
интеллекта
Голландии
,
Университет
города
Рима
ди
Сапиенца
,
Универ
-
ситет
города
Прага
,
Университет
города
Цюрих
,
МЧС
Германии
,
Италии
,
Швейцарии
и
другие
пар
-
тнёры
.
Нашими
задачами
в
этом
проекте
были
со
-
вершенствование
конструкции
летающего
робота
и
создание
программного
обеспечения
автономного
управления
.
Членам
нашей
команды
удалось
по
-
участвовать
в
серии
европейских
учений
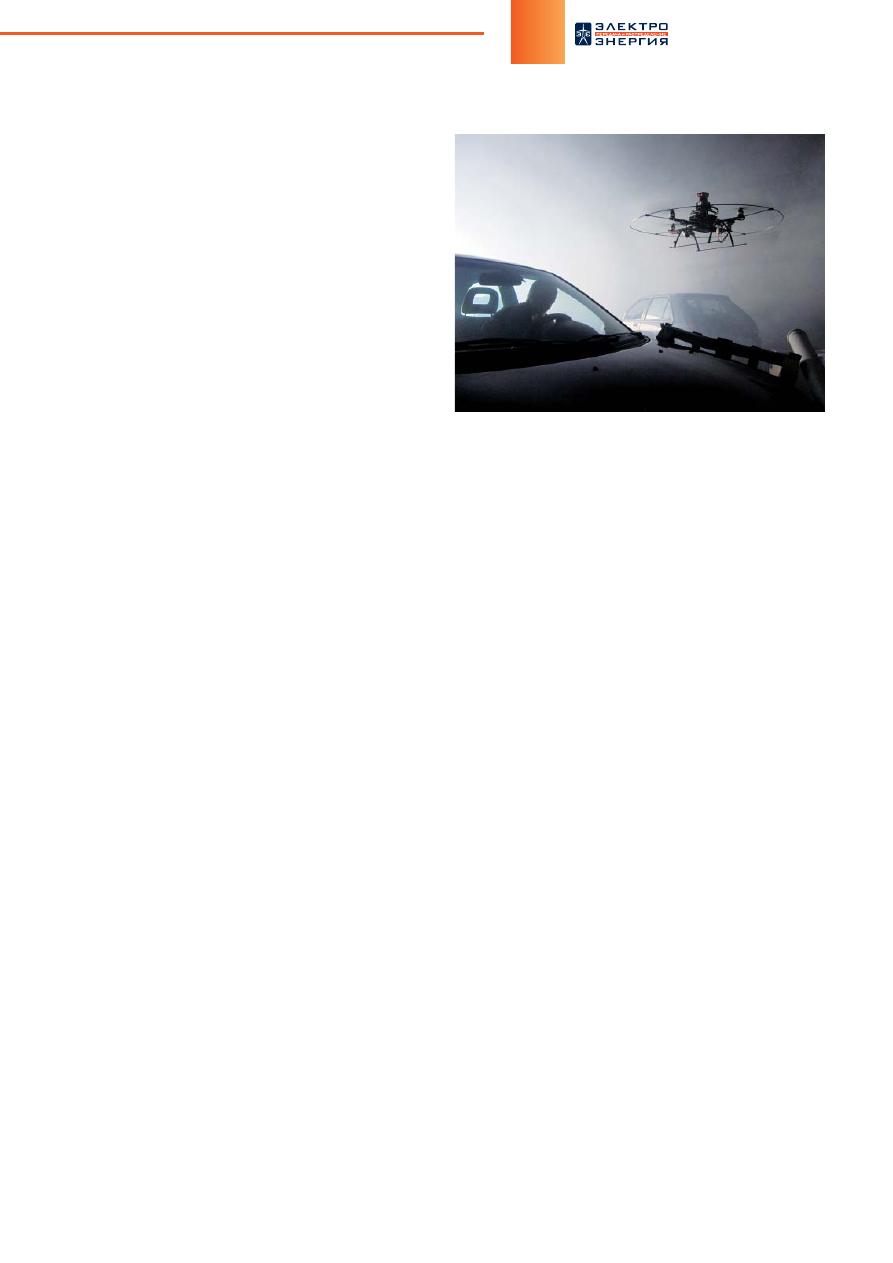
(
рис
. 2),
в
частности
в
ходе
землетрясения
в
г
.
Мирандола
на
севере
Италии
.
Участвуя
в
этом
проекте
,
мы
близко
познакоми
-
лись
с
проблематикой
создания
автономных
летаю
-
щих
роботов
и
обрели
определённые
компетенции
в
этой
теме
,
а
также
увидели
современный
уровень
постановки
задач
.
На
выставке
промышленности
и
инноваций
«
ИННОПРОМ
-2013»
мы
представили
концепт
летающего
робота
для
диагностики
ВЛ
.
На
-
шей
разработкой
заинтересовался
заместитель
ге
-
нерального
директора
филиала
ОАО
«
Федеральная
сетевая
компания
» —
Магистральные
электриче
-
ские
сети
Урала
Андрей
Александрович
Тараненко
.
Было
организовано
совещание
,
и
в
ходе
экспертно
-
го
обсуждения
,
в
котором
приняли
участие
началь
-
ник
службы
диагностики
Л
.
М
.
Масасин
и
начальник
службы
сетей
В
.
В
.
Савицкий
,
были
выявлены
наибо
-
лее
интересные
и
перспективные
направления
для
исследований
и
разработок
.
В
частности
,
стало
по
-
нятно
,
что
только
летающий
робот
в
электрических
сетях
не
нужен
,
так
как
он
не
может
дать
инженер
-
ных
данных
о
состоянии
ВЛ
,
а
даёт
только
картин
-
ку
.
Следовательно
,
нужно
разработать
гибридное
устройство
,
которое
способно
садиться
и
сканиро
-
вать
силовой
провод
и
грозотрос
.
Этот
робот
должен
быть
способен
проходить
ВЛ
от
подстанции
до
под
-
станции
,
преодолевая
расстояния
часто
более
20,
а
то
и
50
км
.
Технология
устойчивого
движения
по
стальному
канату
в
проекте
«
Канатоход
»
уходит
историей
в
разработки
производственного
объединения
«
Атом
-
спецконтроль
»
г
.
Заречный
.
Роботы
,
созданные
в
объединении
,
использовались
на
всех
атомных
станциях
СССР
,
стран
Восточной
Европы
и
участво
-
вали
в
ликвидации
последствий
катастрофы
на
Чер
-
нобыльской
АЭС
.
—
Говорят
,
что
самое
сложное
в
изобретении
—
воплотить
его
в
жизнь
.
Сколько
займёт
про
-
цесс
реализации
Вашего
проекта
?
Рис
. 2.
Учения
в
рамках
проекта
НИФТИ
,
г
.
Дортмунд
,
Германия
48
СЕТИ РОССИИ
страны
,
Фонд
«
Сколково
»,
ОАО
«
Московская
объ
-
единённая
электросетевая
компания
»
и
отраслевой
журнал
«
ЭЛЕКТРОЭНЕРГИЯ
.
Передача
и
распреде
-
ление
»
в
2014
году
проводили
конкурс
«
Энергопро
-
рыв
».
Конкурс
был
призван
облегчить
путь
от
идеи
до
внедрения
.
Было
подано
более
150
проектов
,
ор
-
ганизована
серьёзная
отраслевая
экспертиза
.
Наша
команда
приняла
участие
в
конкурсе
,
прошла
в
фи
-
нал
и
победила
.
По
итогам
конкурса
ОАО
«
МОЭСК
»
приняло
ре
-
шение
внедрить
на
своих
объектах
наш
первый
ком
-
плекс
после
его
удачных
испытаний
,
а
Фонд
«
Скол
-
ково
»
одобрил
получение
гранта
в
5
млн
рублей
.
В
2014
году
нами
была
проведена
серия
испыта
-
ний
на
объектах
филиала
ОАО
«
ФСК
ЕЭС
» —
МЭС
Урала
и
ОАО
«
МОЭСК
» (
рис
. 3).
Кроме
этого
,
в
де
-
кабре
2014
года
мы
выиграли
в
конкурсе
«
Иннова
-
ции
в
электроэнергетике
»,
который
проводил
Фонд
«
Сколково
».
В
настоящее
время
мы
стали
резиден
-
том
Фонда
«
Сколково
»,
оформляем
документы
для
получения
гранта
и
партнёрское
соглашение
с
рос
-
сийским
инвестором
и
европейским
партнёром
.
Сегодня
мы
ведём
исследования
и
разработки
в
нескольких
направлениях
:
•
интеграция
измерительных
устройств
,
входящих
в
диагностический
модуль
;
•
обеспечение
заряда
аккумуляторов
от
ВЛ
для
длительной
работы
устройства
;
•
программа
автономного
управления
,
состоящая
из
симулятора
и
конструктора
стандартных
функ
-
ций
,
например
,
автоматической
стыковки
с
сило
-
вым
проводом
В
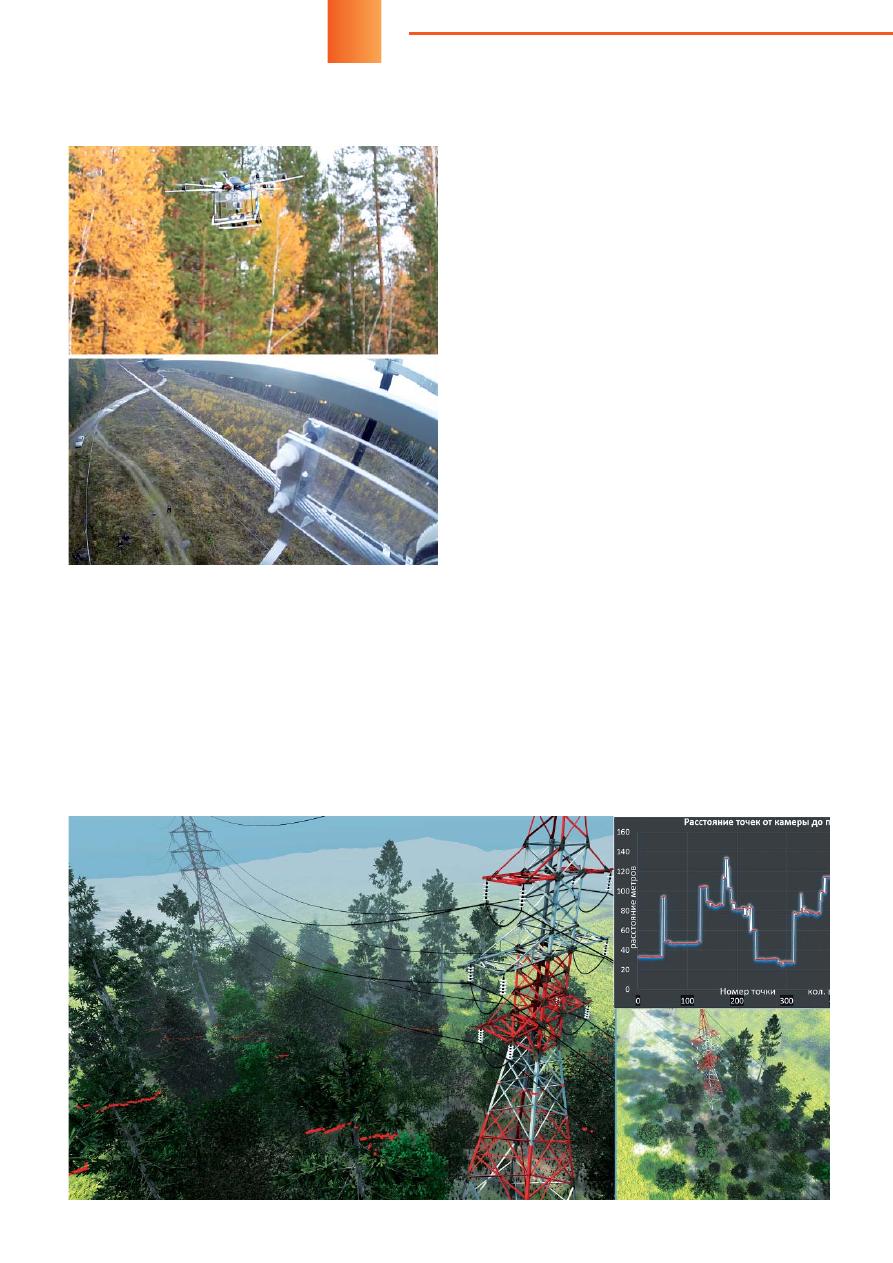
ходе
испытаний
в
ОАО
«
МОЭСК
»
на
ВЛ
110
кВ
«
Очаково
» — «
Мазилово
»
в
декабре
2014
года
были
получены
данные
с
лазерного
сканера
,
которые
ча
-
стично
использовались
для
реконструкции
сцены
в
симуляторе
(
рис
. 4).
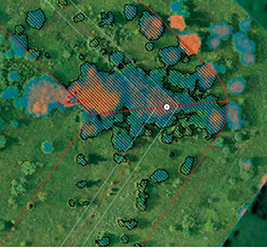
Рис
. 3.
Испытания
роботизированного
комплекса
«
Канатоход
»
ВЛ
220
кВ
,
октябрь
2014
года
Рис
. 4.
Реконструкция
лазерного
сканирования
сцены
пролета
ВЛ
в
симуляторе
«
Канатохода
»
—
Мы
знаем
,
что
очень
многие
изобретения
в
са
-
мых
разных
сферах
науки
и
техники
были
сделаны
в
нашей
стране
.
Однако
количество
изобретений
,
кото
-
рые
были
широко
внедрены
в
народное
хозяйство
—
значительно
меньше
.
Внедрение
инноваций
—
сложная
задача
.
На
пути
реализации
нашего
проекта
были
прой
-
дены
несколько
этапов
.
ОАО
«
Россети
»,
объединя
-
ющее
основную
часть
электрических
сетей
нашей

49
№
3 (30),
май
–
июнь
, 2015
—
Существуют
ли
аналоги
подобному
проекту
?
—
Аналогами
нашего
проекта
являются
две
ка
-
тегории
аппаратов
:
летающие
и
мобильные
устрой
-
ства
,
перемещающиеся
по
силовому
проводу
или
грозозащитному
тросу
.
Из
первой
категории
наиболее
известен
Airbotix,
ПТЭРО
и
др
.
Во
второй
категории
в
мире
работают
две
группы
:
в
Канаде
и
Японии
.
Робот
LineScout
выиграл
престиж
-
ную
премию
имени
Эдиссона
в
2010
году
.
Эти
роботы
требуют
специальной
подъёмной
техники
для
своей
установки
и
демонтажа
,
кроме
того
,
они
предполага
-
ют
,
как
правило
,
работу
на
отключённой
ВЛ
.
—
Какие
у
Вашего
комплекса
преимущества
и
недостатки
?
—
Главным
преимуществом
«
Канатохода
»
перед
летающими
устройствами
является
способность
осуществлять
более
точный
инструментальный
ин
-
женерный
контроль
элементов
ВЛ
.
Кроме
этого
,
од
-
ним
из
существенных
преимуществ
«
Канатохода
»
перед
летающими
роботами
является
система
под
-
зарядки
аккумуляторов
от
ВЛ
.
Основными
преимуществами
нашего
комплек
-
са
перед
мобильными
устройствами
являются
про
-
стота
конструкции
,
способность
достижения
любого
элемента
ВЛ
,
лёгкость
установки
и
демонтажа
на
си
-
ловом
проводе
или
грозотросе
.
—
Долго
ли
Ваш
комплекс
будет
актуален
?
—
Наша
идея
затрагивает
базовую
технологию
технического
обслуживания
ВЛ
.
Когда
она
будет
отработана
и
реализована
,
то
сможет
прослужить
довольно
долго
,
возможно
,
вплоть
до
прекращения
использования
воздушных
высоковольтных
линий
электропередачи
.
Беседовала
Людмила
ЮДИНА
КОММЕНТАРИЙ
Олег
ПЕРЦОВСКИЙ
,
директор
по
операционной
деятельности
Кластера
энерго
-
эффективных
технологий
Фонда
«
Сколково
»
Проект
«
Канатоход
»
стал
одним
из
победителей
конкурса
«
Энергопрорыв
»
прошло
-
го
года
,
который
мы
уже
традиционно
проводим
вместе
с
ОАО
«
Россети
».
Тематика
проекта
привлекла
внимание
многих
отраслевых
экспертов
,
входивших
в
число
членов
жюри
и
,
по
результатам
конкурса
,
разработчикам
было
предложено
провести
пилотное
внедрение
их
проекта
в
ОАО
«
МОЭСК
».
Проекту
,
безусловно
,
предстоит
пройти
ещё
достаточно
длительный
путь
,
в
том
числе
с
точки
зрения
решения
нерешённых
техно
-
логических
задач
,
прежде
чем
он
будет
готов
к
полноценному
промышленному
внедре
-
нию
,
но
уже
достигнутые
результаты
и
,
главное
,
настрой
авторов
проекта
позволяют
оптимистично
смотреть
на
его
перспективы
.
Надо
сказать
,
что
,
не
умаляя
важности
непосредственно
темы
использования
промышленных
роботов
в
электрических
сетях
,
я
бы
всё
же
рассматривал
вопрос
в
более
широком
контексте
и
говорил
о
теме
ав
-
томатизации
систем
мониторинга
и
управления
энергетическими
объектами
.
Вообще
,
сейчас
в
Кластере
энергоэффективных
технологий
Фонда
«
Сколково
»
уже
более
30
стартапов
,
занимающихся
вопросами
повышения
эффективности
электросетевого
хозяйства
.
Это
направление
разработок
сейчас
активно
раз
-
вивается
и
рассматривается
нами
в
числе
приоритетных
для
Кластера
.
Что
крайне
важно
,
большую
актив
-
ность
в
вопросах
поиска
и
внедрения
инновационных
технологий
проявляют
и
компании
электросетевого
комплекса
.
В
числе
важнейших
задач
для
эффективного
развития
сетей
можно
отметить
дистанционный
мониторинг
работы
элементов
сети
«
нижнего
уровня
»,
в
том
числе
,
в
некоторых
случаях
,
в
режиме
реаль
-
ного
времени
,
автоматизированная
обработка
этих
данных
,
системы
дистанционного
управления
элемен
-
тами
сети
.
Среди
разработок
наших
стартапов
и
партнёров
,
кроме
проекта
«
Канатоход
»,
есть
такие
темы
,
как
мониторинг
линейных
объектов
инфраструктуры
с
использованием
бес
-
пилотных
летательных
аппаратов
,
портативный
комплекс
для
автоматизации
сбора
данных
о
состоянии
воздушных
линий
и
подстанций
,
автоматизированная
система
мониторинга
го
-
лолёдообразования
на
воздушных
линиях
,
автоматизирован
-
ная
система
мониторинга
оборудования
электростанций
для
обеспечения
безопасности
,
различные
элементы
цифровых
подстанций
,
цифровые
измерительные
трансформаторы
для
умных
сетей
и
др
.
Мы
ожидаем
,
что
многие
из
этих
техноло
-
гий
,
как
и
другие
разработки
,
связанные
,
в
широком
смысле
,
с
популярной
тематикой
Smart Grid,
начнут
в
ближайшие
годы
переходить
,
в
том
числе
и
при
нашей
поддержке
,
от
стадии
разработок
к
стадии
промышленного
внедрения
.
Результатом
будет
снижение
объёмов
использования
низкоквалифициро
-
ванного
ручного
труда
,
повышение
надёжности
и
безопасно
-
сти
электросетевого
комплекса
.
Победа
в
конкурсе
«
Энергопрорыв
2014»
Победа
в
конкурсе
«
Энергопрорыв
2014»
Оригинал статьи: Роботизированный комплекс «Канатоход»
Команда из Уральского федерального университета с проектом роботизированного комплекса для диагностики ВЛ «Канатоход» победила в 2014 году в конкурсе ОАО «Россети» «Энергопрорыв — от идеи до внедрения», а в апреле 2015 года представила свой проект на всемирной выставке промышленности и инноваций Hannover Messe 2015, в ходе которой российскими технологиями заинтересовалось множество компаний из ЕС, США, Индии, Китая, Бразилии и других стран. О проекте «Канатоход» рассказывает его руководитель Александр ЛЕМЕХ из Уральского федерального университета (УрФУ), кафедра «Подъёмно-транспортные машины и роботы» Механико-машиностроительного института.