39
№
5 (32) 2015
В
2014
году
ПАО
«
МОЭСК
»
начало
выпуск
технологических
заданий
на
реконструк
-
цию
ПС
с
одним
общим
разделом
по
АСУ
ТП
и
телемеханике
(
ТМ
).
До
этого
задания
имели
два
отдельных
раздела
и
строились
две
от
-
дельные
системы
—
ТМ
(
с
середины
прошлого
века
)
и
АСУ
ТП
(
с
конца
90-
х
годов
),
объединён
-
ные
межмашинным
обменом
.
Так
был
осущест
-
влён
переход
к
проектированию
и
строительству
в
ПАО
«
МОЭСК
»
одной
системы
—
АСУ
ТП
с
функци
-
ями
ТМ
.
Ниже
рассмотрена
история
этого
вопроса
и
приведён
анализ
целесообразности
такого
реше
-
ния
.
В
ФЗ
«
Об
электроэнергетике
» [1]
рассматрива
-
ются
базовые
понятия
оперативно
-
диспетчерского
управления
,
требования
которого
определяются
нормативными
документами
[3—7];
а
также
со
-
гласно
ФЗ
«
О
техническом
регулировании
» [2]
тех
-
ническими
регламентами
и
сопутствующими
доку
-
ментами
—
нормами
проектирования
,
правилами
устройства
электроустановок
,
правилами
техниче
-
ской
эксплуатации
[8—14].
Документы
первой
группы
главным
образом
опре
-
деляют
функционал
,
необходимый
для
организации
оперативно
-
диспетчерского
управления
.
Требования
к
структуре
рассматриваемых
систем
описаны
в
документах
второй
группы
.
Структура
в
соответствии
с
«
Правилами
технической
эксплуатации
» (
ПТЭ
) [8]
Пункт
1.8
ПТЭ
[8]
определяет
,
что
понятие
АСУ
объединяет
понятия
АСУ
ТП
,
АСДУ
и
АСУ
П
.
В
соответствии
с
пунктом
6.10.1
ПТЭ
,
АСДУ
является
системой
ДП
всех
уровней
управления
,
которые
мо
-
гут
функционировать
как
самостоятельно
,
так
и
быть
интегрированы
с
АСУ
ТП
энергообъектов
.
В
соответ
-
ствии
с
пунктом
6.10.3
ПТЭ
—
в
АСДУ
входит
ОИК
и
ССПИ
(
системы
сбора
и
передачи
информации
)
с
пунктом
6.10.7
ПТЭ
—
в
состав
ССПИ
должны
вхо
-
дить
системы
телемеханики
.
Данный
тезис
приво
-
дится
также
в
пункте
1.8.7
ПТЭ
,
где
определено
,
что
устройство
телемеханики
является
частью
ССПИ
,
которая
входит
в
состав
АСУ
.
В
соответствии
с
6.10.4
ПТЭ
,
ОИК
должен
обеспечивать
связь
с
устройствами
телемеханики
.
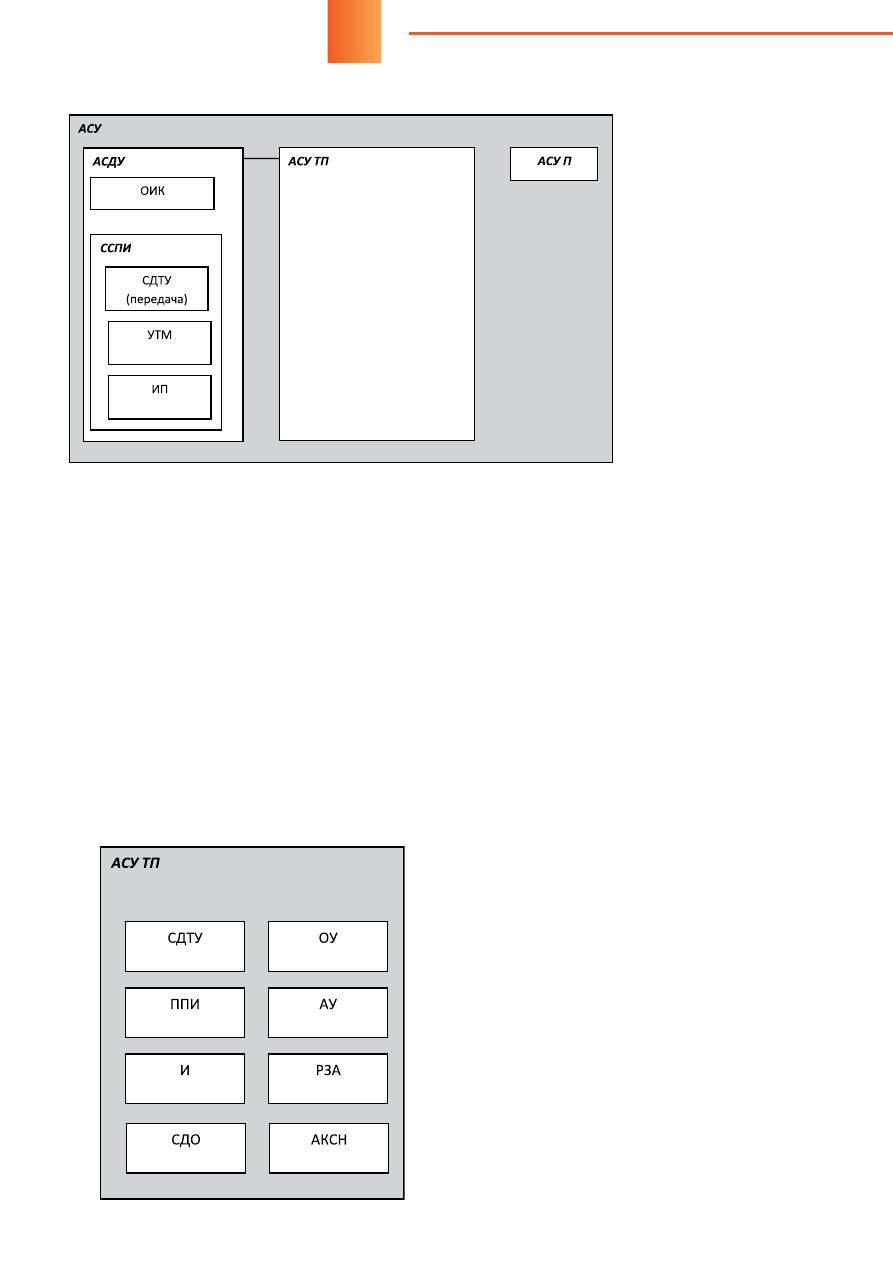
Пункт
1.8.5
ПТЭ
до
-
пускает
как
самостоятельное
функционирование
АСДУ
,
АСУ
ТП
и
АСУ
П
(
системы
АСУ
П
в
данной
статье
не
рассматриваются
),
так
и
как
подсистем
,
интегрированных
в
АСУ
энергосистем
(
рис
. 1).
Подсистема
СДТУ
применительно
к
ССПИ
обе
-
спечивает
телемеханические
каналы
связи
.
Подси
-
стема
ИП
обеспечивает
функционирование
измери
-
тельных
преобразователей
,
которые
подключаются
к
модулям
УСО
(
устройства
сбора
),
что
совместно
реализует
функции
сбора
.
Структура
в
соответствии
с
«
Ос
-
новными
положениями
по
созданию
АСУ
ТП
» [9]
ПТЭ
[8]
не
содержит
требований
к
внутренней
структуре
АСУ
ТП
электрических
подстанций
.
Пункт
4.7
ПТЭ
«
Системы
управления
технологическими
процессами
»
относится
к
разделу
4 «
Тепломехани
-
ческое
оборудование
электростанций
и
тепловых
Решение по объединению
систем АСУ ТП и
телемеханики для
подстанций ПАО «МОЭСК»
Евгений БОГДАНОВ,
начальник управления телемеханики ПАО «МОЭСК»,
Игорь САПОЖНИКОВ,
начальник производственной службы АСТУ ЦЭС — филиала ПАО «МОЭСК»
40
СЕТИ РОССИИ
сетей
»,
поэтому
применять
требования
данного
раз
-
дела
к
АСУ
ТП
электрических
подстанций
неправо
-
мерно
.
Для
дальнейшего
анализа
рассмотрим
РД
34.35.120-90 «
Основные
положения
по
созданию
автоматизированных
систем
управления
технологи
-
ческими
процессами
(
АСУ
ТП
)
подстанций
напряже
-
нием
35—1150
кВ
» (
ОП
[9]).
Поставим
своей
целью
детализировать
по
ОП
структуру
АСУ
ТП
на
рис
. 1.
В
соответствии
с
требованиями
п
. 3.1.
ОП
,
АСУ
ТП
электрической
подстанции
35—1150
кВ
должна
состоять
из
подсистем
:
информационной
(
И
),
опе
-
ративного
управления
(
ОУ
),
автоматического
управ
-
ления
(
АУ
),
передачи
и
приёма
информации
(
ППИ
),
связи
(
СДТУ
),
релейной
защиты
(
РЗА
),
диагностики
состояния
основного
электрооборудования
(
СДО
),
автоматизации
и
контроля
собственных
нужд
(
АКСН
).
В
скобках
добавлены
обо
-
значения
подсистем
и
укрупнённый
функционал
в
соответствии
с
п
. 3.2—
3.9
ОП
для
отображения
на
рис
. 2.
При
установке
АСУ
ТП
,
в
соответствии
с
ОП
значи
-
тельно
расширяется
объём
собираемой
информации
за
счёт
интегрируемых
под
-
систем
(
РЗиА
,
СДО
и
т
.
п
).
Собираемая
информация
отображается
на
подстан
-
ционном
АРМ
оперативно
-
го
персонала
(
подсистема
оперативного
управления
),
а
также
передаётся
через
подсистему
связи
(
СДТУ
)
на
диспетчерские
пункты
верх
-
них
уровней
АСДУ
(
п
. 3.5
и
2.3
ОП
).
Из
этого
следует
,
что
данным
документом
предполагается
поглоще
-
ние
системы
ССПИ
системой
АСУ
ТП
.
Идеология
поглощения
функций
ССПИ
системой
АСУ
ТП
при
-
ведена
также
в
«
Рекомендациях
по
техническому
проектированию
подстанций
переменного
тока
с
высшим
напряжением
35—750
кВ
» [10].
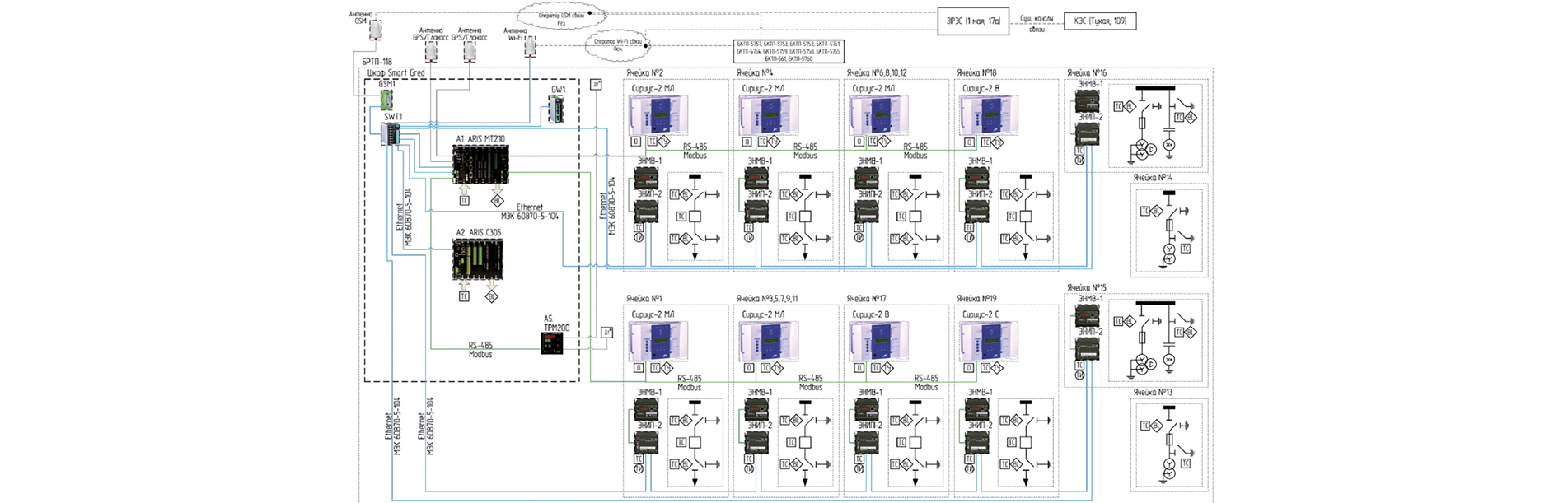
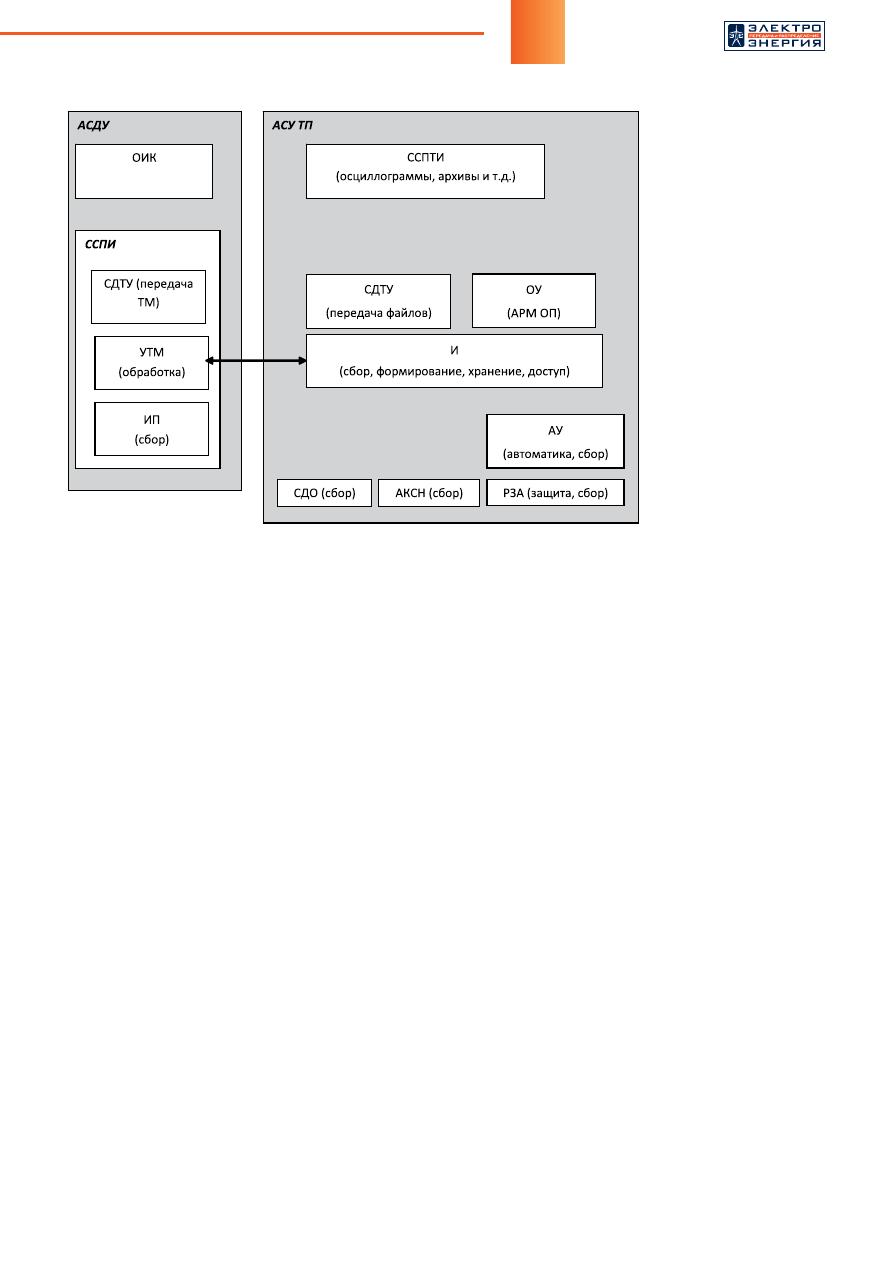
Структура
АСУ
ТП
и
ССПИ
(
ТМ
),
применяв
-
шаяся
до
2014
года
на
ПС
ПАО
«
МОЭСК
»
На
рис
. 3
приведена
структура
,
используемая
при
построении
АСУ
ТП
и
ССПИ
на
подстанциях
ПАО
«
МОЭСК
».
В
данной
структуре
функция
ССПИ
оставлена
за
системой
телемеханики
,
но
она
также
используется
как
ППИ
для
АСУ
ТП
в
терминах
ОП
,
а
АСУ
ТП
используется
как
часть
ССПИ
для
АСДУ
,
а
также
как
поставщик
файлов
с
архивами
событий
,
осциллограммами
и
т
.
п
. (
ССПТИ
).
АСУ
ТП
выполняет
интеграционные
функции
.
Собственно
подсистемы
РЗА
,
СДО
и
,
возможно
,
дру
-
гие
,
проектируемые
независимо
,
но
их
интеграция
—
в
проекте
по
АСУ
ТП
.
Целью
данной
статьи
являет
-
ся
попытка
показать
,
что
на
данном
этапе
развития
целесообразно
объединять
как
минимум
проекты
по
ТМ
и
АСУ
ТП
и
создавать
единую
систему
ТМ
и
АСУ
ТП
на
базе
единого
программно
-
технического
ком
-
плекса
.
ПРЕДПОСЫЛКИ
ДЛЯ
ОБЪЕДИНЕНИЯ
.
АНАЛИЗ
ОТЛИЧИЙ
АСУ
ТП
И
ТМ
Объединение
систем
АСУ
ТП
и
ССПИ
(
ТМ
)
ранее
также
происходило
,
но
на
уровне
информационного
обмена
различных
систем
.
Такое
объединение
ха
-
рактеризуется
:
•
разработкой
двух
проектов
;
•
поставкой
двух
систем
;
•
наладкой
двух
систем
;
•
наладкой
информационного
обмена
между
двумя
системами
;
•
наличием
двух
различных
инструментальных
систем
;
Рис
. 2.
Структура
АСУ
ТП
по
ОП
(
обработка
)
(
сбор
)
(
передача
)
(
сбор
)
(
автоматика
)
(
защита
)
(
сбор
)
(
АРМ
ОП
)
Рис
. 1.
Структура
по
ПТЭ
(
сбор
)
(
обработка
)
41
№
5 (32) 2015
•
дальнейшей
эксплуатацией
двух
систем
.
Указанные
обстоятельства
порождают
следую
-
щее
:
•
отсутствие
при
проектировании
единого
взгляда
на
сбор
информации
,
и
,
как
следствие
,
избыточ
-
ность
системы
сбора
;
•
аналогично
,
избыточность
системы
электропита
-
ния
;
•
дополнительные
усилия
для
координации
строи
-
тельно
-
монтажных
и
пусконаладочных
работ
АСУ
ТП
и
ССПИ
;
•
дополнительные
усилия
на
реализацию
инфор
-
мационного
взаимодействия
систем
;
•
отсутствие
единого
электронного
проекта
систем
;
•
отсутствие
единых
инструментальных
средств
АСУ
ТП
и
ССПИ
.
Эффективное
объединение
систем
АСУ
ТП
и
ССПИ
позволяет
решить
эти
проблемы
при
условии
выполнения
единого
технического
задания
,
проекти
-
рования
,
поставки
,
наладки
,
при
наличии
единой
ин
-
струментальной
системы
.
Выполнение
этих
условий
достигается
объединением
эксплуатирующих
служб
в
одну
.
Ниже
проанализированы
отличительные
особен
-
ности
АСУ
ТП
и
ССПИ
подстанций
,
их
влияние
на
возможности
объединения
систем
.
Учтено
развитие
во
времени
требований
к
функционалу
и
техниче
-
ским
возможностям
систем
.
Обязательность
ССПИ
и
факультатив
-
ность
АСУ
ТП
АСДУ
является
обязательной
системой
для
дис
-
петчерских
пунктов
,
эксплуатирующих
электрические
сети
,
а
также
органов
диспетчерского
управления
(
п
. 1.8.3
ПТЭ
[8]).
ССПИ
и
входящие
в
неё
средства
телемеханизации
,
следовательно
,
должны
функци
-
Рис
. 3.
Структура
ПС
ПАО
«
МОЭСК
»
онировать
на
каждой
подстанции
.
ПУЭ
рас
-
сматривает
установку
простейших
средств
телемеханизации
на
2
сигнала
,
но
отсылает
при
этом
на
отрасле
-
вые
и
ведомственные
положения
(
ПУЭ
[11],
п
. 3.3.89).
Определяю
-
щими
являются
требо
-
вания
ПАО
«
Системный
оператор
ЕЭС
»,
скла
-
дывающиеся
из
переч
-
ня
объектов
диспетче
-
ризации
филиала
ПАО
«
СО
ЕЭС
»
Московское
РДУ
и
требований
к
ти
-
повому
составу
теле
-
механической
инфор
-
мации
,
передаваемой
с
объектов
электроэнер
-
гетики
в
диспетчерские
центры
ПАО
«
СО
ЕЭС
».
С
учётом
этих
тре
-
бований
возможно
функционирование
подстанций
с
установленными
средствами
телемеханизации
на
1—2
аварийно
-
предупредительных
сигнала
,
но
большинство
под
-
станций
снабжено
средствами
телемеханизации
на
сотни
сигналов
и
десятки
телеизмерений
.
С
другой
стороны
,
при
наличии
установленной
ССПИ
,
необходимость
установки
АСУ
ТП
не
ре
-
гламентируется
,
а
определяется
потребностями
и
технической
политикой
эксплуатирующей
организа
-
ции
.
При
наличии
сигнализации
состояния
термина
-
лов
РЗА
,
средств
центральной
сигнализации
,
щита
управления
и
т
.
п
.,
установка
АСУ
ТП
может
оказать
-
ся
нецелесообразной
.
Рассматриваемое
отличие
было
существенно
на
этапе
первых
внедрений
АСУ
ТП
ПС
,
поскольку
тре
-
бования
к
составу
телемеханической
информации
были
существенно
ниже
,
а
стоимость
АСУ
ТП
ПС
су
-
щественно
превышала
стоимость
ССПИ
.
На
сегодняшний
день
требования
ПАО
«
СО
ЕЭС
»
Московское
РДУ
к
составу
телемеханической
информации
резко
увеличено
за
счёт
расширенно
-
го
состава
аварийно
-
предупредительной
сигнали
-
зации
,
необходимости
передачи
состояния
разъ
-
единителей
и
заземляющих
ножей
(
Приложение
к
Р
36-
б
2-I-2-19-4711
от
11
ноября
2014
г
., «
Типовой
состав
телеинформации
,
передаваемой
с
объек
-
тов
электроэнергетики
диспетчерские
центры
ПАО
«
СО
ЕЭС
» [7]).
Реализация
указанных
требований
требует
интеграции
в
ССПИ
сигналов
от
термина
-
лов
РЗА
,
аварийно
-
предупредительной
сигнализа
-
ции
с
каждого
элегазового
выключателя
и
т
.
п
.
При
этом
,
в
каждом
конкретном
случае
затруднительно
сравнить
затраты
на
ввод
необходимой
информа
-
ции
классическими
средствами
УТМ
(
сухие
контак
-
ты
,
сигнальный
кабель
,
модули
УСО
)
и
методами
АСУ
ТП
(
с
помощью
интеграции
по
цифровым
кана
-

42
СЕТИ РОССИИ
лам
).
Функциональные
возможности
современных
средств
телемеханизации
,
построенных
на
высоко
-
производительных
контроллерах
(
возможности
ко
-
торых
зачастую
используются
на
10—20%),
прибли
-
жаются
к
функциональным
возможностям
АСУ
ТП
,
а
стоимость
—
меньше
,
но
сравнима
со
стоимостью
средств
АСУ
ТП
.
Поэтому
установка
единой
системы
АСУ
ТП
и
ТМ
с
учётом
единого
проектирования
,
поставки
и
пуско
-
наладочных
работ
,
может
оказаться
,
а
при
установке
обоих
систем
обязательно
окажется
,
экономически
выгодной
.
Факультативность
установки
АСУ
ТП
при
обяза
-
тельности
ССПИ
на
современном
этапе
развития
не
может
быть
препятствием
для
объединения
систем
.
ПТК
АСУ
ТП
не
поддерживают
весь
спектр
телемеханических
каналов
Исторически
системы
телемеханики
функциони
-
ровали
в
условиях
низкоскоростных
каналов
.
Одной
из
основных
задач
было
эффективное
использова
-
ние
возможностей
канала
.
Экономился
каждый
бит
.
Это
достигалось
отсутствием
различий
уровней
фи
-
зического
,
канального
,
прикладного
,
передачи
дан
-
ных
.
Использовались
методы
широтно
-
импульсного
кодирования
.
Существовала
глубокая
связь
задач
СДТУ
и
АСДУ
.
Протоколы
носили
имена
систем
те
-
лемеханики
(
ВРТФ
,
УТБ
,
РПТ
,
Аист
,
Гранит
,
ТМ
-512,
ТК
-113
и
т
.
п
.).
В
дальнейшем
,
при
постепенном
вы
-
делении
связных
задач
в
самостоятельные
функ
-
ции
,
всё
равно
,
в
целях
экономии
,
в
ущерб
надёж
-
ности
,
сложности
приёмо
-
передающих
устройств
,
широко
применялись
методы
синхронной
передачи
,
так
как
обеспечивали
экономию
до
30%
трафика
(
РД
34.48.511-96,
п
. 3 [12]).
Появившиеся
комплексы
АСУ
ТП
не
были
ори
-
ентированы
на
использование
таких
каналов
связи
.
Перед
разработчиками
аппаратуры
и
программ
АСУ
ТП
,
в
основном
иностранными
,
задачи
поддержки
низкоскоростных
телемеханических
каналов
не
ста
-
вились
.
Это
обстоятельство
препятствовало
воз
-
можности
поглощения
функций
телемеханики
уста
-
навливаемым
комплексом
АСУ
ТП
.
На
сегодняшний
день
в
задачах
телемеханиза
-
ции
происходит
переход
на
стандартные
протоколы
МЭК
-60870-5-101/104 (
ОАО
«
СО
ЕЭС
», 19.03.2010,
«
Типовые
технические
требования
по
организации
обмена
информацией
с
диспетчерскими
центрами
и
центрами
управления
сетями
РСК
»
и
«
Типовая
про
-
грамма
модернизации
и
расширения
системы
сбора
и
передачи
информации
на
подстанциях
МРСК
» [6],
п
. 2.7.5.).
На
диспетчерских
пунктах
верхних
уров
-
ней
управления
АСДУ
(
ОИК
)
поддерживают
стан
-
дартные
протоколы
МЭК
-60870-5-101/104.
Поэтому
рассматриваемое
обстоятельство
на
современном
этапе
развития
не
может
быть
препятствием
для
объединения
систем
.
Требования
к
электропитанию
Отмеченная
в
предыдущем
разделе
связь
между
СДТУ
и
АСДУ
привела
к
проблеме
трактовки
требо
-
ваний
к
гарантированному
питанию
.
В
явном
виде
есть
требования
к
гарантирован
-
ному
питанию
СДТУ
при
пропадании
собственных
нужд
,
не
менее
6
часов
.
Объясняется
это
требование
наличием
транзитных
каналов
связи
,
проходящих
через
обесточенную
подстанцию
.
В
целях
сохране
-
ния
работоспособности
терминалов
защит
,
работа
-
ющих
по
этим
каналам
на
других
,
не
обесточенных
подстанциях
,
требуется
обеспечение
работоспособ
-
ности
этих
каналов
.
Поскольку
отдельно
выставленных
требований
к
гарантированному
питанию
АСДУ
не
было
, 6-
часо
-
вые
требования
распространили
и
на
них
.
С
другой
стороны
,
требования
к
гарантированно
-
му
питанию
АСУ
ТП
в
явном
виде
указаны
в
п
. 3.2.6.7
[13],
и
составляют
30
минут
.
Возникшие
различия
также
являлись
препят
-
ствием
к
объединению
систем
,
так
как
поддержание
функций
АСУ
ТП
в
течение
6
часов
неоправданно
много
.
На
сегодняшний
день
есть
понимание
избыточ
-
ности
требований
в
6
часов
для
ССПИ
.
Ввиду
того
,
что
это
требование
не
жёсткое
,
ПАО
«
МОЭСК
»
в
технологических
заданиях
на
ССПИ
выставляет
тре
-
бование
— 4
часа
.
С
другой
стороны
,
потребление
систем
ССПИ
и
АСУ
ТП
падает
,
и
уже
возможно
ори
-
ентироваться
на
питание
от
подстанционной
аккуму
-
ляторной
батареи
.
Миллисекундная
разрешающая
способность
дискретных
сигналов
АСУ
ТП
Классические
задачи
ССПИ
предполагают
пере
-
дачу
на
верхние
уровни
АСДУ
положений
выключа
-
телей
,
аварийно
-
предупредительную
сигнализацию
.
Для
этих
сигналов
не
требуется
высокая
разрешаю
-
щая
способность
:
аварийно
-
предупредительная
сиг
-
нализация
обычно
«
снимается
»
после
«
блинкера
»,
а
для
коммутационных
аппаратов
миллисекундный
уровень
не
требуется
.
До
сих
пор
функционируют
системы
телемеханики
,
обеспечивающие
разреша
-
ющую
способность
порядка
100
миллисекунд
.
Для
ССПИ
этого
вполне
достаточно
.
С
появлением
АСУ
ТП
ПС
,
особенно
на
ранних
этапах
,
когда
широко
использовались
устройства
РЗА
в
релейном
исполнении
,
возникла
необходи
-
мость
сбора
дискретных
сигналов
с
разрешающей
способностью
на
уровне
миллисекунд
.
Во
-
первых
,
в
релейных
устройствах
РЗА
существуют
важные
им
-
пульсные
сигналы
,
появляющиеся
на
5—10
миллисе
-
кунд
,
и
система
не
должна
их
пропустить
.
Во
-
вторых
,
при
анализе
работы
устройств
РЗА
важна
последо
-
вательность
появления
сигналов
.
В
-
третьих
,
АСУ
ТП
получает
не
только
дискретные
сигналы
,
но
и
осцил
-
лограммы
аварийных
ситуаций
.
Совместный
анализ
осциллограмм
и
событий
,
снимаемых
с
устройств
те
-
лемеханики
с
разрешающей
способностью
100
мс
,
не
имеет
смысла
,
так
как
ошибка
даже
в
2
миллисекунды
соответствует
36
градусам
,
что
для
анализа
работы
защит
много
.
Для
реализации
миллисекундной
разре
-
шающей
способности
в
комплексах
АСУ
ТП
исполь
-
зовались
специальные
модули
дискретного
ввода
,
включающие
в
себя
средства
прерываний
.
Стои
-
мость
этих
модулей
была
существенно
выше
стои
-

43
№
5 (32) 2015
мости
модулей
УСО
,
используемых
в
ССПИ
.
Даже
в
комплексах
АСУ
ТП
,
в
целях
сокращения
стоимости
,
устанавливались
модули
,
работающие
по
опросу
(
без
высокой
разрешающей
способности
)
и
по
прерывани
-
ям
.
Но
разделение
модулей
,
работающих
по
опросу
и
прерываниям
,
требовало
детальной
проработки
на
уровне
проектирования
,
что
не
всегда
возможно
.
А
тотальное
использование
модулей
,
работающих
по
прерываниям
—
экономически
неоправданно
.
Указанное
различие
систем
ССПИ
и
АСУ
ТП
так
-
же
служило
препятствием
к
объединению
систем
.
На
сегодняшний
день
обеспечивается
ввод
дис
-
кретных
сигналов
с
точностью
до
одной
миллисекун
-
ды
и
менее
,
как
в
системах
ССПИ
,
так
и
в
АСУ
ТП
,
без
существенного
влияния
на
общую
стоимость
системы
.
Отсутствие
в
ССПИ
функции
концентрации
информации
(
интеграции
)
Раньше
традиционные
реализации
средств
теле
-
механизации
не
предполагали
возможностей
инте
-
грации
.
Зачастую
,
при
установке
на
подстанции
двух
устройств
телемеханики
,
им
требовались
два
теле
-
механических
канала
,
так
как
устройство
телемеха
-
ники
не
рассчитано
на
приём
информации
от
«
сосе
-
да
»
и
передачу
её
на
диспетчерский
пункт
в
общем
потоке
по
своему
телемеханическому
каналу
.
Для
АСУ
ТП
интеграция
—
одна
из
основных
функций
.
Причём
одним
из
важных
показателей
функциональности
АСУ
ТП
является
спектр
поддер
-
живаемых
протоколов
(SPABUS, MODBUS,
и
т
.
д
.)
Данное
обстоятельство
препятствовало
погло
-
щению
функций
АСУ
ТП
системой
ССПИ
.
На
сегодняшний
день
все
широко
используемые
средства
телемеханизации
включают
в
себя
возмож
-
ности
интеграции
с
достаточно
широким
спектром
поддерживаемых
протоколов
.
При
необходимости
(
и
отечественных
разработчиков
программного
обе
-
спечения
)
можно
дополнить
систему
поддержкой
не
-
обходимых
протоколов
.
Отсутствие
в
ССПИ
АРМ
ОП
Почти
за
2
десятилетия
опыта
внедрения
опре
-
делились
требования
к
человеко
-
машинному
интер
-
фейсу
АСУ
ТП
ПС
,
реализованному
в
АРМ
опера
-
тивного
персонала
(
АРМ
ОП
).
Необходимо
отметить
,
что
интерфейс
ССПИ
,
базирующийся
на
ОИК
-
интер
-
фейсе
верхнего
уровня
АСДУ
,
не
совсем
подходит
для
АСДУ
подстанционного
уровня
.
Основными
не
-
проработанными
вопросами
подстанционного
уров
-
ня
являются
:
•
недостаточно
развитая
аварийно
-
предупреди
-
тельная
индикация
.
Неструктурированное
предо
-
ставление
оператору
большого
объёма
данных
АСУ
ТП
не
позволяет
обеспечить
требуемую
наблюдаемость
,
быстрое
определение
источни
-
ков
неисправности
и
т
.
д
.;
•
вывешивание
плакатов
безопасности
;
•
экраны
формирования
АПТС
;
•
инструментарий
вывода
в
ремонт
/
ввода
в
работу
;
•
инструментарий
формирования
щитовых
ведо
-
мостей
;
•
экраны
диагностики
оборудования
;
•
экраны
доступа
к
терминалам
РЗА
;
•
просмотр
осциллограмм
.
Отсутствие
в
ССПИ
проработанных
решений
с
учётом
перечисленных
выше
пунктов
,
препятство
-
вало
поглощению
системой
ССПИ
функций
АСУ
ТП
.
Недостаточность
вычислительных
воз
-
можностей
ССПИ
Рассмотрев
описание
функций
подсистемы
ППИ
в
пункте
3.5
ОП
[9],
можно
сделать
вывод
,
что
объём
информации
,
собираемый
в
АСУ
ТП
ПС
,
значитель
-
но
больше
объёма
информации
в
ССПИ
.
По
опыту
реализации
систем
ССПИ
и
АСУ
ТП
ПС
в
ЦЭС
—
фи
-
лиале
ПАО
«
МОЭСК
»,
можно
оценить
объём
данных
ССПИ
<1000
параметров
,
а
объём
данных
АСУ
ТП
ПС
— 7000—15000
параметров
.
Для
обеспечения
работы
с
большими
объёмами
данных
в
АСУ
ТП
ПС
используются
серверы
с
уста
-
новленными
винчестерами
большой
ёмкости
.
ССПИ
не
располагали
достаточными
вычис
-
лительными
мощностями
и
средствами
хранения
для
работы
с
таким
объёмом
данных
.
Это
препят
-
ствовало
поглощению
функций
АСУ
ТП
системой
ССПИ
.
На
сегодняшний
день
,
в
системах
ССПИ
,
во
-
первых
,
используются
высокопроизводительные
контроллеры
,
а
во
-
вторых
,
отработаны
решения
по
распределению
функций
между
несколькими
устрой
-
ствами
(
контроллерами
).
Это
позволяет
масштабиро
-
вать
ССПИ
до
необходимых
объёмов
.
Появились
средства
хранения
информации
(
флэш
)
достаточного
объёма
и
надёжности
.
Более
низкая
,
по
сравнению
с
классическими
серверами
АСУ
ТП
,
мощность
систем
ССПИ
более
не
является
препятствием
для
поглощения
функций
АСУ
ТП
.
Требуется
высокая
надёжность
передачи
телемеханических
данных
Одними
из
существенных
отличий
ССПИ
от
АСУ
ТП
являются
высокие
требования
к
надёжности
те
-
лемеханического
тракта
данных
[«
Типовые
техни
-
ческие
требования
…» [6],
п
. 2.5.4].
Канал
данных
,
предоставляемый
для
СДТУ
для
телемеханических
данных
,
не
очень
широкий
(
обычно
,
до
64
К
),
но
обязательно
резервирован
по
разнесённым
геогра
-
фическим
трассам
;
организован
пристальный
кон
-
троль
их
состояния
.
Однако
надёжность
передачи
телемеханических
данных
определяется
не
только
каналом
данных
,
но
и
надёжностью
передающе
-
го
устройства
.
Классические
ССПИ
построены
на
базе
контроллеров
,
характеризуемых
операцион
-
ной
системой
реального
времени
,
стохастическим
характером
выполняемых
программ
,
отсутствием
вмешательства
действий
операторов
(
контроллер
не
выполняет
функций
HMI).
Оборудование
обыч
-
но
размещено
в
шкафах
с
естественным
охлажде
-
нием
,
безвентиляторного
исполнения
,
с
широким
температурным
диапазоном
.
Контроллеры
ССПИ
отличаются
невысокой
гибкостью
,
но
высокой
на
-
дёжностью
.

44
СЕТИ РОССИИ
Технические
средства
АСУ
ТП
обычно
размеща
-
ются
в
вентилируемых
шкафах
.
Оборудование
тре
-
бует
температурного
режима
до
25
о
С
(
допускается
35
о
С
—
до
двух
часов
).
Системы
построены
на
базе
операционной
системы
Windows.
Для
хранения
про
-
грамм
и
данных
используются
винчестеры
.
Для
реа
-
лизации
HMI-
функций
производится
коррекция
кон
-
фигурации
,
изменение
схем
и
т
.
д
.
Надёжность
таких
решений
недостаточна
.
О
недостаточной
надёжно
-
сти
свидетельствует
также
применяемое
в
АСУ
ТП
горячее
резервирование
серверов
.
Однако
практика
показывает
,
что
переключение
резерва
не
всегда
чётко
срабатывает
и
требуется
вмешательство
об
-
служивающего
персонала
.
Недостаточная
надёж
-
ность
механизма
резервирования
при
недостаточ
-
ной
надёжности
собственно
технических
средств
служила
главным
препятствием
для
поглощения
функций
ССПИ
системой
АСУ
ТП
.
На
сегодняшний
день
появились
решения
АСУ
ТП
на
базе
безвентиляторного
,
безвинчестерного
оборудования
,
с
широким
температурным
диапазо
-
ном
.
На
базе
таких
решений
объединение
систем
АСУ
ТП
и
ССПИ
стало
реальным
.
ВЫВОДЫ
Объединение
систем
ССПИ
и
АСУ
ТП
позволяет
достигнуть
следующих
результатов
:
•
соответствие
идеологии
«
Основных
положений
по
созданию
АСУ
ТП
» [6], «
Рекомендациям
по
техническому
проектированию
подстанций
пере
-
менного
тока
с
высшим
напряжением
35—750
кВ
» [10], «
Нормам
технологического
проектиро
-
вания
подстанций
переменного
тока
с
высшим
напряжением
35—750
кВ
» [14],
предполагающим
создание
единой
системы
;
•
сокращение
стоимости
создания
за
счёт
единого
проектирования
,
использования
единых
средств
сбора
и
управления
,
поставки
от
единого
изгото
-
вителя
оборудования
,
наладки
одной
бригадой
.
Например
,
если
согласиться
,
что
измерения
для
фидеров
6—10
кВ
достаточно
получать
с
точно
-
стью
3% (
обмотка
10
Р
),
то
можно
избежать
уста
-
новки
в
ячейках
измерительных
преобразовате
-
лей
,
подключённых
к
обмоткам
0,5,
что
сэкономит
значительные
суммы
;
•
сокращение
стоимости
владения
и
времени
устранения
неисправностей
за
счёт
эксплуатации
системы
одной
службой
.
Стоит
отметить
,
что
объединение
АСУ
ТП
и
ССПИ
—
только
первый
шаг
.
Уже
сегодня
возможна
более
глубокая
интеграция
подсистемы
контроля
ка
-
чества
электрической
энергии
,
позволяющая
убрать
дополнительный
системный
блок
,
переложив
соот
-
ветствующий
функционал
на
серверы
АСУ
ТП
(
под
-
ходы
по
такому
решению
частично
реализованы
на
подстанции
«
Марфино
»
ОАО
«
Энергокомплекс
»).
Сегодня
на
повестке
дня
стоит
вопрос
о
реали
-
зации
в
проекте
по
АСУ
ТП
функций
оперативных
блокировок
(
ОБР
).
Нет
препятствий
к
интеграции
систем
учёта
электроэнергии
.
Объединение
систем
позволит
плавно
осуществить
переход
к
построению
цифровых
подстанций
.
ЛИТЕРАТУРА
1.
ФЗ
от
21.02.2003
г
.
№
35 «
Об
электроэнерге
-
тике
».
2.
ФЗ
от
15.12. 2002
г
.
№
184 «
О
техническом
ре
-
гулировании
».
3.
ПП
РФ
№
854
от
27.12.2004
г
. «
Правила
ОДУ
в
электроэнергетике
».
4.
ОАО
РАО
«
ЕЭС
России
», 29.01.2007
г
., «
Целевая
модель
прохождения
команд
и
организации
кана
-
лов
связи
и
передачи
телеметрической
инфор
-
мации
между
диспетчерскими
центрами
и
ЦУС
сетевых
организаций
,
подстанциями
».
5.
НП
АТС
,
протоколы
№
36, 40, 42, 45, 22.04.2004
г
.,
«
Требования
к
информационному
обмену
тех
-
нологической
информацией
с
автоматизиро
-
ванной
системой
системного
оператора
»,
При
-
ложение
№
2
к
«
Регламенту
допуска
субъектов
оптового
рынка
электроэнергии
к
торговой
си
-
стеме
оптового
рынка
электроэнергии
».
6.
ОАО
«
СО
ЕЭС
», 19.03.2010, «
Типовые
техниче
-
ские
требования
по
организации
обмена
инфор
-
мацией
с
диспетчерскими
центрами
и
центрами
управления
сетями
РСК
»
и
«
Типовая
программа
модернизации
и
расширения
системы
сбора
и
передачи
информации
на
подстанциях
МРСК
».
7.
Приложение
к
Р
36-
б
2-I-2-19-4711
от
11
ноября
2014
г
. «
Типовой
состав
телеинформации
,
пе
-
редаваемой
с
объектов
электроэнергетики
в
диспетчерские
центры
ОАО
«
СО
ЕЭС
».
8.
Минэнерго
России
,
приказ
№
229
от
19
июня
2003
г
., «
Правила
технической
эксплуатации
электрических
станций
и
сетей
Российской
Фе
-
дерации
».
9.
Министерство
энергетики
и
электрификации
СССР
, 28.12.90
г
.,
РД
34.35.120-90 «
Основные
положения
по
созданию
автоматизированных
систем
управления
технологическими
процес
-
сами
(
АСУ
ТП
)
подстанций
напряжением
35—
1150
кВ
».
10
Минэнерго
России
от
30
июня
2003
г
.,
Приказ
№
288,
СО
-153-34.20187-2003, «
Рекомендации
по
техническому
проектированию
подстанций
пере
-
менного
тока
с
высшим
напряжением
35—750
кВ
».
11.
Правила
устройства
электроустановок
,
гл
. 3.3,
Автоматика
и
телемеханика
.
12.
РАО
ЕЭС
России
,
РД
34.48.511-96,
Руководящие
указания
по
критериям
оценки
технического
состояния
аппаратуры
телемеханики
энерго
-
систем
с
целью
определения
необходимости
ее
замены
или
реконструкции
,
ОАО
«
Фирма
ОРГРЭС
»,
утв
. 22
июля
1996
г
.
13.
РД
153-34.1-35.127-2002, «
Общие
технические
требования
к
программно
-
техническим
ком
-
плексам
для
АСУ
ТП
тепловых
электростан
-
ций
».
14. «
Нормы
технологического
проектирования
под
-
станций
переменного
тока
с
высшим
напря
-
жением
35—750
кВ
(
НТП
ПС
)»,
СТО
56947007-
29.240.10.028-2009,
утв
.
приказом
№
136
ОАО
«
ФСК
ЕЭС
» 13
апреля
2009
г
.
Оригинал статьи: Решение по объединению систем АСУ ТП и телемеханики для подстанций ПАО «МОЭСК»
В 2014 году ПАО «МОЭСК» начало выпуск технологических заданий на реконструкцию ПС с одним общим разделом по АСУ ТП и телемеханике (ТМ). До этого задания имели два отдельных раздела и строились две отдельные системы — ТМ (с середины прошлого века) и АСУ ТП (с конца 90-х годов), объединённые межмашинным обменом. Так был осуществлён переход к проектированию и строительству в ПАО «МОЭСК» одной системы — АСУ ТП с функциями ТМ. Ниже рассмотрена история этого вопроса и приведён анализ целесообразности такого решения.