94
воздушные линии
Разработка системы
непрерывного
мониторинга воздушных
линий электропередачи
в автоматическом режиме
Т
ранспортировка электроэнергии от места ее производства — элек-
тростанций к потребителям является одной из важнейших задач
электроэнергетики. Транспорт электроэнергии производится преиму-
щественно по воздушным линиям электропередачи (ВЛ).
Эффективность и надежность передачи энергии определяется состояни-
ем ВЛ, поэтому оценка состояния ВЛ является неотъемлемой составляющей
бесперебойного процесса транспортировки электрической энергии. Очевид-
но, что чем выше частота выполнения мониторинга состояния элементов ВЛ,
тем скорее будут устранены зарождающиеся дефекты и, соответственно, тем
меньше технологических нарушений произойдет на ВЛ.
В соответствии с п. 5.7.14 Правил технической эксплуатации электрических
станций и сетей Российской Федерации (ПТЭ) при эксплуатации ВЛ должны
быть организованы их периодические и внеочередные осмотры. График пери-
одических осмотров утверждается техническим руководителем организации,
эксплуатирующей электрические сети. Периодичность осмотров каждой ВЛ
по всей длине должна быть не реже 1 раза в год. Кроме того, не реже 1 раза
в год инженерно-техническим персоналом должны производиться выбороч-
ные осмотры отдельных ВЛ (или их участков), а все ВЛ (участки), подлежащие
капитальному ремонту, должны быть осмотрены полностью [1].
На сегодняшний день определение состояния ВЛ 35–110 кВ в ПАО «Рос-
сети Центр» производится путем пешего обхода ЛЭП с периодичностью не
реже 1 раза в год. Однако подобный осмотр дает неполное представление
о состоянии ВЛ. Более информативным видом осмотра ВЛ является верховой
осмотр, но для его проведения необходим вывод воздушной линии в ремонт,
а также использование специальной техники. При этом объем проводимого
верхового осмотра одной ВЛ — 3–4 опоры в день.
Согласно ПТЭ верховые осмотры с выборочной проверкой проводов и тро-
сов в зажимах и в дистанционных распорках на ВЛ напряжением 35 кВ и выше
или их участках, имеющих срок службы 20 лет и более или проходящих в зо-
нах интенсивного загрязнения, а также по открытой местности, должны про-
изводиться не реже 1 раза в 6 лет, а на остальных ВЛ 35 кВ и выше (участках)
не реже 1 раза в 12 лет [1].
Очевидно, что при существующем порядке эксплуатации ВЛ обеспечивать
высокий уровень надежности становится все сложнее. Это усугубляется меня-
ющимися климатическими зонами и участившимися погодными аномалиями,
а также увеличением отработавшего свой ресурс оборудования и материалов
при неизменной численности обслуживающего персонала. Говоря о погод-
ных аномалиях, можно привести пример так называемого «ледяного дождя»
в 2015 году в Костромской области, ранее вообще никогда не подвергавшейся
такого рода природным явлениям. Липецкая область постепенно становится
гололедной зоной, где неблагоприятные погодные явления в осенне-зимний
период становятся обычными явлениями.
В
данной
статье
описана
технология
автоматизированной
диагностики
воздушных
линий
электропередачи
с
использованием
беспилотного
воздушного
судна
(
БВС
).
Акуличев
В
.
О
.,
заместитель гене-
рального директора
по цифровой транс-
формации ПАО
«Россети Центр»
Бредихин
А
.
С
.,
и.о. начальника
дирекции по инно-
вационной деятель-
ности и импорто-
замещению ПАО
«Россети Центр»
Мурашев
Б
.
А
.,
главный специалист
Департамента циф-
ровой трансформа-
ции ПАО «Россети
Центр»
Середкин
О
.
А
.,
начальник управ-
ления технологи-
ческого развития
и цифровизации
филиала ПАО
«Россети Центр» —
«Липецкэнерго»
95
Учитывая, что осмотр ВЛ бригадами — достаточно
трудоемкая и затратная работа, особенно в сложных
погодных условиях или в труднодоступной местности,
а также невысокую эффективность выявления дефек-
тов с учетом периодичности выполнения осмотров,
логичной является гипотеза о повышении эффектив-
ности мониторинга ВЛ с помощью БВС.
В 2018 году в ПАО «Россети Центр» была начата
научно-исследовательская и опытно-конструкторская
работа (НИОКР) «Разработка системы управления
группой БПЛА для выполнения непрерывного монито-
ринга ВЛ в автоматическом режиме с сетью зарядных
станций как элемента системы управления».
Предпосылками к реализации данного проекта яв-
ляются следующие проблемы, с которыми сталкива-
ется обслуживающий персонал при эксплуатации ВЛ:
– высокая доля ВЛ, выработавших свой норматив-
ный срок;
– сложность выявления зарождающихся дефектов
ВЛ на ранних стадиях до возникновения техноло-
гического нарушения;
– контроль состояния ВЛ путем осмотра бригадами,
в том числе со значительной задержкой по времени;
– высокие трудозатраты обслуживающего персона-
ла на осмотр;
– высокие затраты на привлечение техники для
выполнения регламентированных верховых
осмот ров ВЛ.
Планируемый функционал разрабатываемой сис-
темы:
– выявление зарождающихся дефектов элементов
ВЛ и, соответственно, повышение надежности
работы ВЛ, снижение недоотпуска электроэнергии;
– снижение доли участия персонала в обслуживании
ВЛ и, соответственно, снижение операционных
издержек при обслуживании ВЛ;
– повышение безопасности работы ВЛ путем контро-
ля нахождения посторонних предметов, строений
и т.п. в охранной зоне ВЛ;
– контроль выполнения работ подрядными органи-
зациями на объектах электросетевого хозяйства;
– проведение предпроектных и изыскательских ра-
бот с целью строительства/реконструкции ВЛ
и объектов электрических сетей;
– предварительная оценка затрат на вырубку про-
сек посредством численного анализа по высотам
деревьев, их количеству, типу.
Учитывая тенденцию ежегодного улучшения
технических характеристик БВС и миниатюриза-
ции полезной нагрузки (фото- и видеокамеры, уль-
трафиолетовые и инфракрасные камеры и т.п.) ло-
гичным становится предположение о возможности
получения объективной информации о состоянии
линий по результатам мониторинга с применени-
ем БВС.
При этом эффективность применения технологии
обеспечивается в случае отсутствия участия высоко-
квалифицированного оператора БВС, а также боль-
ших временных затрат персонала служб воздушных
линий на обработку информации от БВС.
Исходя из этого, в ПАО «Россети Центр» был
сформулирован совершенно новый подход к разви-
тию системы диагностики с помощью БВС. Он состо-
ит не только в отказе от высококвалифицированного
оператора БВС, но и в обеспечении обработки боль-
шого массива данных с помощью элементов искус-
ственного интеллекта.
В качестве основной инновации принята идея соз-
дания системы из БВС и многофункциональных базо-
вых станций.
Целевая модель состоит в полностью автоматиче-
ской системе контроля ВЛ и распознавания дефектов
с передачей диагностической информации в единую
Систему управления производственными активами.
Концептуально вид процесса автоматизированно-
го мониторинга ВЛ с помощью БВС представлен на
рисунке 1.
Результаты НИОКР можно представить в виде сле-
дующих основных разделов.
ДОРАБОТАННЫЙ
БПЛА
КОПТЕРНОГО
ТИПА
В ходе проведенного НИОКР было установлено, что
для уверенного обнаружения дефектов ВЛ скорость
БВС должна находиться в диапазоне 35–40 км/ч, а за
время пролета каждой опоры ВЛ БВС должен сделать
не менее 6 ее фотографий. Для этих целей лучше
всего подходит БВС коптерного типа.
Рис
. 1.
Процесс
автоматизированного
мониторинга
ВЛ
с
помощью
БВС
1
Однократное формирование
полетного задания (для плановых
полетов) и передача его многофунк-
–
циональной площадке базирования
2
Зарядка и базирование БПЛА на
ПС 35–110 кВ, прием задания по
цифровым каналам связи и передача
его в БПЛА
3
Облет трасс ВЛ 35–110 кВ
с диагностикой элементов
ВЛ различными сенсорами
4
Возврат на базу. Передача
диагностической информации
в Центр обработки данных. Начало
режима зарядки
5
Обработка данных нейрон-
ной сетью. Выборка дефек-
–
тов и несоответствий НТД
6
Приоритизация дефектов:
аварийные, неотложные,
устраняемые в процессе ТО
7
Автоматическое формирование
заявки на устранение дефекта
и задания бригаде
№
5 (68) 2021
96
В качестве доработок была встро-
ена контактная система в опоры БВС,
были разделены напряжение пита-
ния силовых установок (двигателей
винтов) и питания систем навигации
для увеличения продолжительности
полета. Так, напряжение питания си-
ловой установки составило 51 В, на-
пряжение питания систем навигации
12 В. Для возможности проведения
полетов в условиях сильных электро-
магнитных излучений электромагнит-
ный компас был заменен на цифро-
вой. В БВС была заложена функция
«слежения за опорой». В результа-
те этого при любом положении БВС
в пространстве опора всегда нахо-
дится в центре кадра.
Данные доработки БВС позволили добиться про-
должительности нахождения аппарата в воздухе до
60 мин, гарантированной навигации в условиях силь-
ных электромагнитных помех, точной ориентации ка-
меры на объект. Внешний вид БВС коптерного типа
представлен на рисунке 2.
Для проведения различных видов осмотра БВС не-
сет как оптическую камеру, так и ИК- и УФ-камеры.
МНОГОФУНКЦИОНАЛЬНАЯ
БАЗОВАЯ
СТАНЦИЯ
Многофункциональная базовая станция устанавлива-
ется на подстанции (ПС) и является местом хранения,
зарядки БВС и контроля метеоусловий. Также базовая
станция выполняет функцию передачи диагностиче-
ской информации от БВС в центр обработки данных
и передачу в БВС полетного задания.
Станция оснащена специальными приводами для
вертикального перемещения БВС, горизонтального
перемещения защитного кожуха и приводами цен-
тровки БВС для его зарядки.
Внешний вид установленной многофункциональ-
ной базовой станции представлен на рисунке 3.
На данных станциях реализована система точной
посадки БВС. Она позволяет посадить БВС на пло-
щадку размером 1,5×1,5 м. Данная технология реа-
лизована путем нанесения на посадочную платформу
специальной метки, по которой БВС ориентируется
в пространстве и осуществляет посадку.
ВОЗДУШНЫЕ
ЛИНИИ
Рис
. 2.
Внешний
вид
БВС
коптерного
типа
Рис
. 3.
Внешний
вид
установленной
многофункциональной
базовой
станции
СПЕЦИАЛЬНОЕ
ПРОГРАММНОЕ
ОБЕСПЕЧЕНИЕ
ДЛЯ
ВЫЯВЛЕНИЯ
ДЕФЕКТОВ
Другой важнейшей системой, реализуемой в рамках
НИОКР, является комплекс алгоритмов и нейросетей
для распознавания дефектов и несоответствий нор-
мативно-технической документации. Это самая вы-
сокоинтеллектуальная часть работы, которая и обес-
печивает отказ от обработки и анализа материалов,
полученных от БВС, с помощью специалиста.
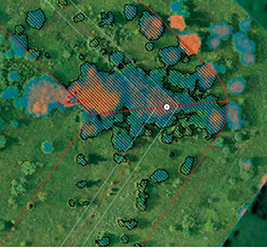
Внешний вид пользовательских интерфейсов про-
граммного обеспечения представлен на рисунке 4.
Данная система позволяет выделить на фотогра-
фии стойку, траверсу, провод, грозотрос, изолятор,
виб рогаситель, предмет в охранной зоне.
Система анализирует каждый элемент на предмет
наличия/отсутствия дефектов.
Алгоритм
работы
системы
.
Полученные с БВС
фотографии передаются в открытую сетевую папку
сервера диагностического программного обеспече-
ния. Затем эти изображения перемещаются в папки,
соответствующие номерам опор, координаты которых
наиболее близки к фактическим координатам опор.
После перемещения изображений в указанные папки
автоматически запускается процесс поиска заранее
заданных обученных классов объектов, связанных
с технологиями машинного зрения (нейронной сети).
Процесс работы нейронной сети завершается запи-
сью координат найденных изображений в XML-файл.
В данном файле перечисляются все найденные объ-
екты с указанием их класса (гирлянда, изолятор и т.д.).
Далее непосредственно выполняется процесс нахож-
дения дефектов. Схематически процесс представлен
на рисунке 5.
97
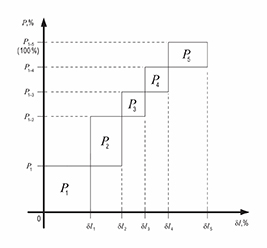
Экспериментальным путем установлено, что ис-
пользование одной модели сверточной нейронной
сети, обученной непосредственно под множество
классов (опора, изолятор, траверса и т.д.), не является
оптимальным исходя из показателей скорости работы
сети. В результате выделено 4 модели и разработан
механизм их последовательного запуска — каскад
сверточных нейронных сетей. При этом на каждом
шаге ведется фильтрация полученных изображений.
Структурно данный алгоритм приведен на рисунке 6.
В ходе реализованной в филиале ПАО «Россети
Центр» — «Липецкэнерго» НИОКР разработана дей-
а)
б)
Рис
. 4.
Примеры
пользовательского
интерфейса
диагностического
ПО
:
а
) 3D-
реконструкция
опоры
;
б
)
ГИС
–
представление
объекта
мониторинга
;
в
)
паспорт
опоры
;
г
)
поопорная
ведомость
;
д
)
ста
тис
тика
дефектов
д)
в)
г)
Рис
. 5.
Процесс
нахождения
дефектов
Фото
JPG-файл
Запись координат
найденных на снимке
объектов в XML-файл.
В данном файле
перечислены все
найденные объекты
с указанием их класса
(опора, гирлянда,
виброгаситель и т.д.)
Работа
специализированных
программ
распознавания
Дефект
отсутствует
Дефект
зафиксирован
Загрузка
фотоматериала
в программу
распознавания
дефектов
Сверточная
нейронная сеть
Запускается процесс
поиска заранее
обученных классов
объектов с примене-
нием технологий машинного зрения
(Object Detection, Convolutional Neuro
Network, Tensor Flow, Open CV)
ствующая система мониторинга ВЛ в автоматиче-
ском режиме с использованием БВС и сети зарядных
станций, которая благодаря новизне и комплексности
применяемых технологий имеет высокий потенциал
масштабирования не только в филиалах ПАО «Рос-
сети Центр» и ПАО «Россети Центр и Приволжье»,
но и в других электросетевых компаниях, имеющих
в своей зоне ответственности ВЛ 35–110 кВ.
В ближайшее время планируется заключить ли-
цензионные договоры с производителями основных
технологий в целях дальнейшей коммерциализации
и масштабирования продукта.
Рис
. 6.
Алгоритм
фильтрации
полученных
изображений
ВЛ
Последователь-
ное «вырезание»
распознанных объ-
ектов на исходном
изображении:
от крупных —
к мелким. Если
«родительский»
(более крупный)
объект не найден,
следующая сеть не
запускается
net_1
net_2
Каждая следующая
сеть «дописыва-
ет» найденные
объекты в общий
XML-файл
ЛИТЕРАТУРА
1. Правила технической
эксплуатации электри-
ческих станций и сетей
Российской
Федера-
ции. Утв. приказом Ми-
нэнерго РФ от 19 ию-
ня 2003 г. № 229. URL:
h t t p s : / / b a s e . g a r a n t .
ru/186039/.
№
5 (68) 2021
Оригинал статьи: Разработка системы непрерывного мониторинга воздушных линий электропередачи в автоматическом режиме
В данной статье описана технология автоматизированной диагностики воздушных линий электропередачи с использованием беспилотного воздушного судна (БВС).