
122
ОБОРУДОВАНИЕ
Применение частотно-зависимых
моделей при расчетах электромеханических
переходных процессов
в изолированных энергосистемах
УДК
621.313.333:621.3.07
В
статье
рассмотрено
влияние
частотно
-
зависимых
моделей
электрических
машин
на
расчеты
электромеханических
переходных
процессов
в
изолированных
энергосисте
-
мах
.
Установлена
важность
учета
частотной
зависимости
при
расчете
в
среднеквадра
-
тичных
величинах
для
расчета
пусков
асинхронных
двигателей
с
прямым
пуском
в
тяже
-
лых
условиях
.
Монаков
Ю
.
В
.,
к
.
т
.
н
.,
доцент
,
заведующий
кафедрой
Электрические
станции
ФГБОУ
ВО
«
НИУ
«
МЭИ
»
Мурзинцев
А
.
В
.,
ассистент
кафедры
Электрические
станции
ФГБОУ
ВО
«
НИУ
«
МЭИ
»
Окнин
Е
.
П
.,
главный
эксперт
отдела
инноваций
и
проектной
деятельности
ПАО
«
Россети
Московский
регион
»
Шутенко
Н
.
В
.,
студент
магистратуры
кафедры
Электрические
станции
ФГБОУ
ВО
«
НИУ
«
МЭИ
»
Ключевые
слова
:
изолированная
энергосистема
,
пуск
асинхронных
двигателей
,
электромеханические
переходные
процессы
,
частотно
-
зависимые
модели
П
уск
асинхронных
двигателей
большой
мощности
вызывает
значительное
снижение
напря
-
жения
на
питающих
шинах
.
Для
изолированных
систем
,
в
которых
мощ
-
ность
нагрузки
сравнима
с
мощностью
источника
,
невозможно
пренебрегать
инерцией
генераторов
,
необходимо
учи
-
тывать
изменение
скорости
их
вращения
и
,
соответственно
,
частоты
в
системе
.
В
подобных
случаях
возможны
срабаты
-
вания
защит
от
снижения
частоты
и
на
-
пряжения
,
а
также
срыв
пуска
машины
.
ПОСТАНОВКА
ЗАДАЧИ
Зачастую
мощные
двигатели
по
техно
-
логическим
причинам
требуют
прямого
пуска
,
при
котором
значение
пусковых
токов
максимальное
.
Понижение
частоты
питающего
напряжения
оказывает
пози
-
тивное
влияние
на
пусковую
характери
-
стику
двигателя
ввиду
зависимости
со
-
противлений
,
момента
и
тока
от
частоты
питающей
сети
.
Эти
зависимости
описы
-
ваются
выражениями
:
M
(
s
) =
I
P
(
s
)
≈
I
C
(
s
) =
=
X
P
= 2
π
C
∙
L
P
,
X
C
= 2
π
C
∙
L
C
,
где
R
P
,
X
P
,
R
C
,
X
C
—
активные
и
индуктив
-
ные
сопротивления
ротора
и
статора
со
-
ответственно
[1].
Для
мощных
двигателей
типовое
зна
-
чение
пускового
cos
φ
обычно
принимает
-
ся
равным
0,15 [2].
Наибольшая
точность
моделирования
достигается
применением
программных
пакетов
,
использующих
мгновенные
зна
-
чения
тока
при
расчете
[3].
Эти
програм
-
мы
(
например
, EMTP, PSCad)
требуют
большого
числа
исходных
данных
,
полу
-
чение
которых
затруднительно
на
стадии
проектирования
.
На
практике
чаще
при
-
меняются
программы
,
рассчитывающие
переходные
процессы
в
действующих
значениях
(
например
, ETAP) [4].
По
умол
-
чанию
в
таких
комплексах
изменение
ча
-
стоты
не
принимается
во
внимание
,
то
есть
сопротивления
асинхронных
машин
зависят
только
от
процессов
,
происхо
-
дящих
при
разгоне
двигателя
[5].
К
этим
явлениям
относится
изменение
сопротив
-
лений
ротора
во
время
пуска
благодаря
эффекту
глубокого
паза
:
X
P
(
s
) =
X
P
пуск
+
∙
(1 –
s
),
R
P
(
s
) =
R
P
пуск
+
∙
(1 –
s
).
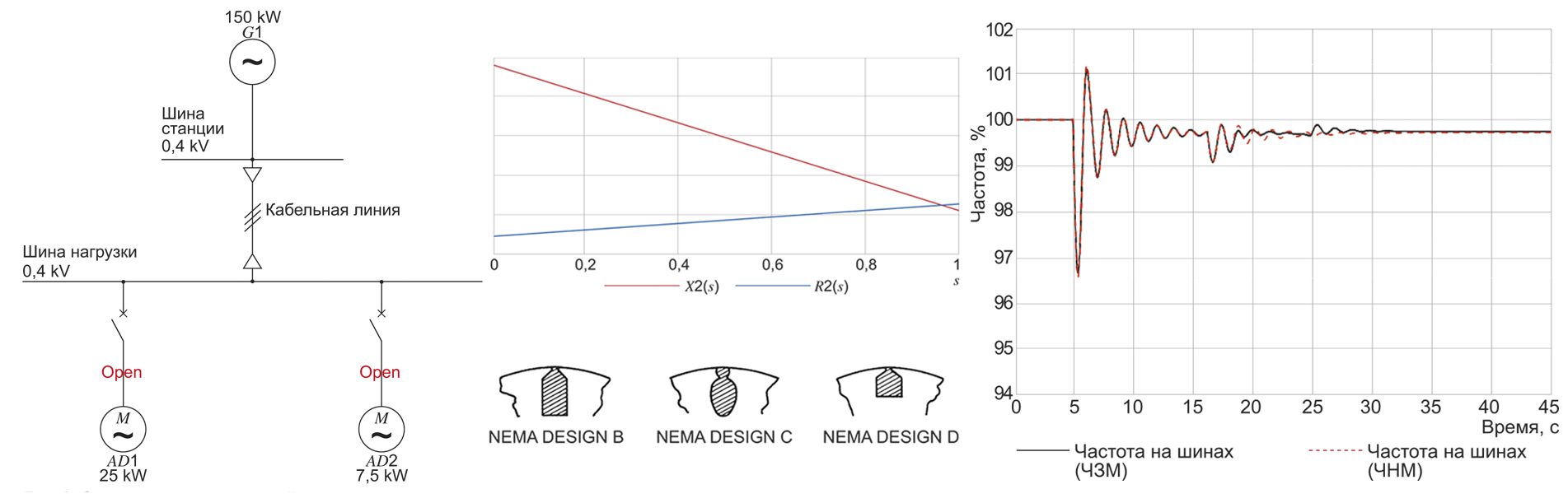
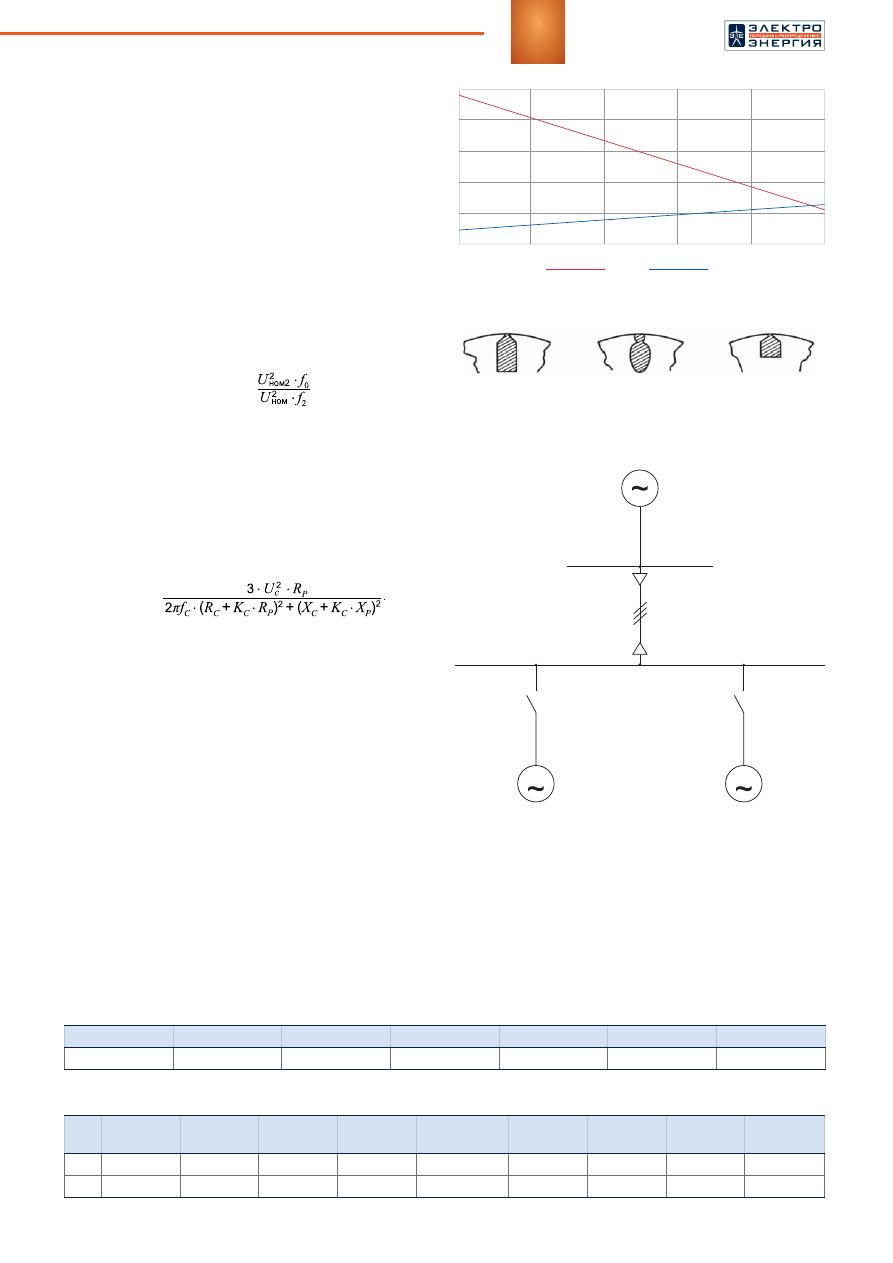
На
рисунке
1
представлена
зависи
-
мость
обозначенных
сопротивлений
от
скольжения
.
Так
как
подавляющее
большинство
современных
используемых
асинхрон
-
ных
двигателей
относятся
к
типам
B
и
C
по
классификации
NEMA (
рисунок
2),
то
эффектом
глубокого
паза
пренебрегать
нельзя
.
Расчеты
пусков
двигателей
в
изоли
-
рованных
энергосистемах
(
например
,
прибрежных
буровых
платформах
)
тре
-
буют
учета
частоты
генератора
.
Для
этого
применяются
частно
-
зависимые
модели
машин
,
в
таких
моделях
ЭДС
машины
не
зависит
от
частоты
,
в
отличие
от
сопро
-
тивлений
.
При
этом
формируется
вектор
значений
частоты
на
шинах
:
ω
Ш
(
t
) – 1
n
,1
=
D
(
ω
Г
(
t
) – 1
m
,1
),
где
D
= –(
B
BB
+
B
BS
)
–1
B
BG
;
123
ω
Ш
—
n
×
1
вектор
частот
на
шинах
системы
;
B
BB
—
n
×
1
матрица
проводимостей
,
так
называемая
мни
-
мая
часть
матрицы
проводимостей
системы
;
B
BG
—
n
×
m
матрица
,
полученная
из
сопротивлений
синхрон
-
ных
машин
;
B
BS
—
диагональная
матрица
,
учитываю
-
щая
внутренние
проводимости
синхронных
машин
на
шине
генерации
[6].
Фактически
,
процесс
по
своей
физике
аналогичен
частотному
пуску
с
использованием
ЧРП
,
что
оказы
-
вает
положительное
влияние
на
пуск
двигателя
.
При
снижении
частоты
ниже
номинальной
пуско
-
вой
ток
снижается
незначительно
из
-
за
изменения
сопротивлений
ротора
и
статора
,
но
пусковой
мо
-
мент
,
который
при
снижении
частоты
зависит
от
от
-
ношения
частот
в
первой
степени
,
значительно
уве
-
личивается
:
M
п
2
=
M
п
∙
,
где
0
—
номинальная
частота
сети
,
а
2
—
изменен
-
ная
частота
при
пуске
.
Наибольшую
сложность
для
системы
представля
-
ют
двигатели
,
которые
запускаются
с
номинальной
нагрузкой
на
валу
.
Снижение
напряжения
на
питаю
-
щих
шинах
для
такой
системы
снижает
пусковой
мо
-
мент
двигателя
и
ухудшает
условия
пуска
[7, 8].
При
этом
снижение
частоты
позволяет
сгладить
эффект
от
снижения
напряжения
,
исходя
из
соотношения
:
M
пуск
=
В
статье
рассматривается
эффект
от
примене
-
ния
частотно
-
зависимых
моделей
при
прямом
пуске
мощных
асинхронных
двигателей
с
короткозамкну
-
тым
ротором
.
ИСПОЛЬЗОВАНИЕ
ЧАСТОТНО
-
ЗАВИСИМОЙ
МОДЕЛИ
В
РАСЧЕТЕ
С
ДЕЙСТВУЮЩИМИ
ЗНАЧЕНИЯМИ
ЭЛЕКТРИЧЕСКИХ
ВЕЛИЧИН
Для
сравнения
параметров
пуска
двигателя
с
ис
-
пользованием
частотно
-
зависимой
и
частотно
-
неза
-
висимой
моделей
и
их
последующего
сопоставления
в
программном
комплексе
ETAP
была
разработана
модель
,
приведенная
на
рисунке
3.
В
данном
случае
синхронный
генератор
—
двух
-
полюсная
машина
с
номинальным
напряжением
0,4
кВ
.
Более
подробно
его
характеристики
пред
-
ставлены
в
таблице
1.
Параметрами
кабельной
ли
-
нии
в
данном
расчете
можно
пренебречь
,
так
как
параметры
,
избранные
для
нее
,
не
влияют
на
итоги
расчетов
.
Наличие
кабельной
линии
обусловлено
спецификой
расчета
в
программном
комплексе
,
где
для
корректного
формирования
ветвей
требуется
ка
-
бельная
линия
.
В
модели
также
используются
два
асинхронных
двигателя
разной
мощности
.
Их
характеристики
представлены
в
таблице
2.
Схемы
замещения
были
Рис
. 1.
Влияние
эффекта
глубокого
паза
на
сопротивле
-
ния
ротора
асинхронного
двигателя
s
0 0,2 0,4 0,6 0,8 1
Рис
. 2.
Классификация
асинхронных
двигателей
по
NEMA
NEMA DESIGN B
NEMA DESIGN C
NEMA DESIGN D
M
M
150 kW
G
1
AD
1
25 kW
0,4 kV
0,4 kV
AD
2
7,5 kW
Кабельная
линия
Шина
нагрузки
Шина
станции
Open
Open
Рис
. 3.
Схема
экспериментальной
сети
Табл
. 1.
Характеристики
синхронной
машины
P
ном
,
кВт
S
ном
,
кВА
cos
φ
ном
U
ном
,
кВ
x
d
"
, %
x
2
ном
, %
n
ном
,
об
/
мин
150
176,5
0,85
0,4
19
18
3000
Табл
. 2.
Характеристики
асинхронных
двигателей
№
1
и
№
2
№
дв
.
P
ном
,
кВт
U
ном
,
кВ
cos
φ
ном
η
ном
n
ном
,
об
/
мин
M
пуск
M
мах
I
пуск
s
ном
, %
1
25
0,4
0,89
0,91
2940
0,8
1,2
4,5
2
2
7,5
0,4
0,86
0,86
2940
0,8
1,2
5,5
2
X
2(
s
)
R
2(
s
)
№
1 (76) 2023
124
ОБОРУДОВАНИЕ
получены
с
использованием
внутренней
функции
ETAP
по
оценке
характеристик
асинхронных
машин
.
В
качестве
механической
нагрузочной
характери
-
стики
для
обоих
двигателей
была
выбрана
модель
,
имитирующая
закрытую
задвижку
,
так
как
такой
случай
пуска
является
наиболее
простым
и
широко
распространенным
.
Для
исследования
возможности
запуска
двига
-
телей
было
проведено
два
опыта
.
Первый
опыт
про
-
водился
с
использованием
частотно
-
независимой
модели
(
ЧНМ
),
так
как
это
наиболее
частый
сцена
-
рий
для
расчетов
,
второй
—
с
использованием
ча
-
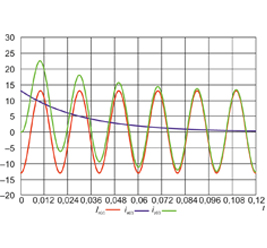
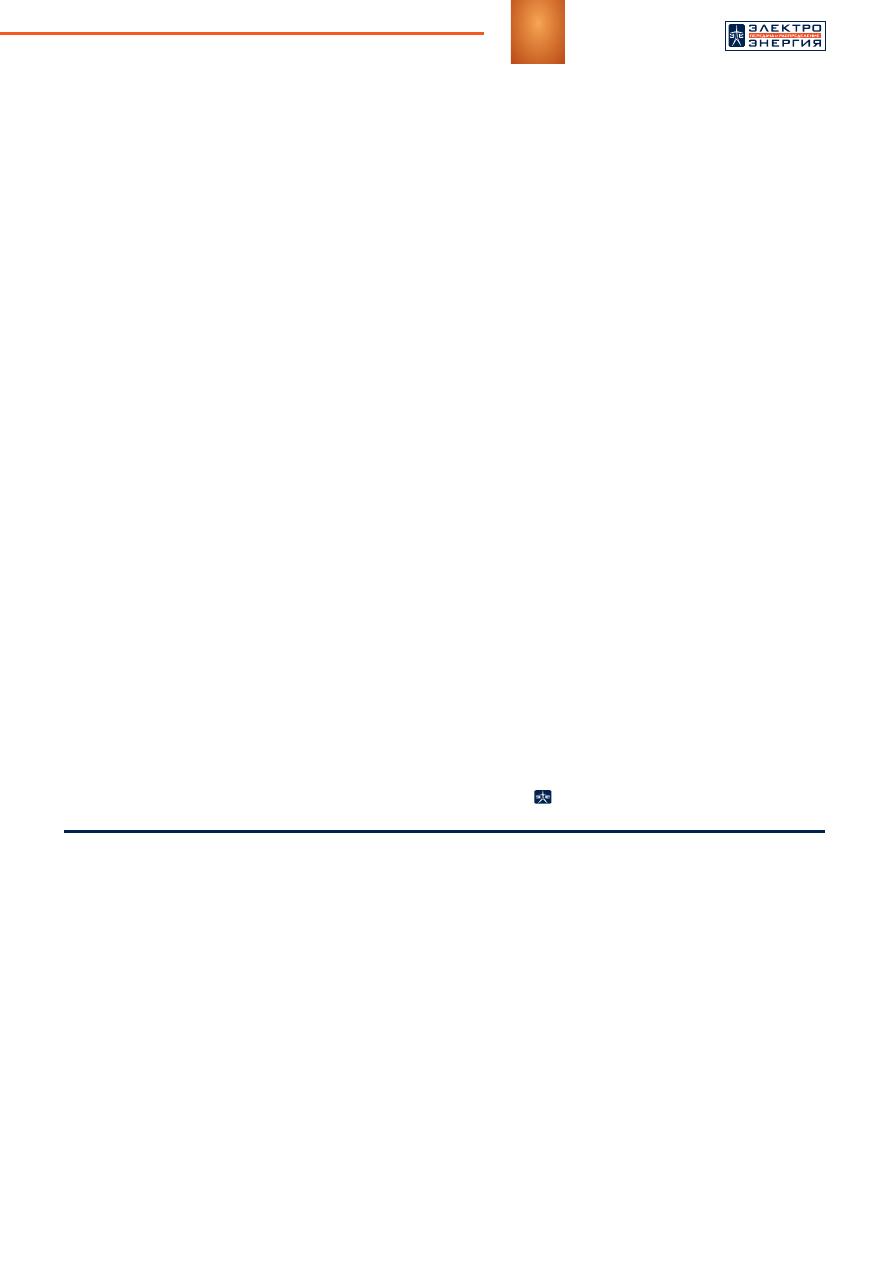
Рис
. 6.
Частота
тока
на
шинах
асинхронных
двига
-
телей
стотно
-
зависимой
модели
(
ЧЗМ
)
элементов
сети
.
Пуск
двигателей
организовывается
ступенчато
,
на
5
секунде
с
начала
расчета
запускается
наиболее
мощный
двигатель
,
во
время
его
пуска
подключает
-
ся
менее
мощный
двигатель
второй
ступени
.
В
обо
-
их
опытах
время
подключения
второго
двигателя
составляет
16,23
секунды
после
начала
расчета
.
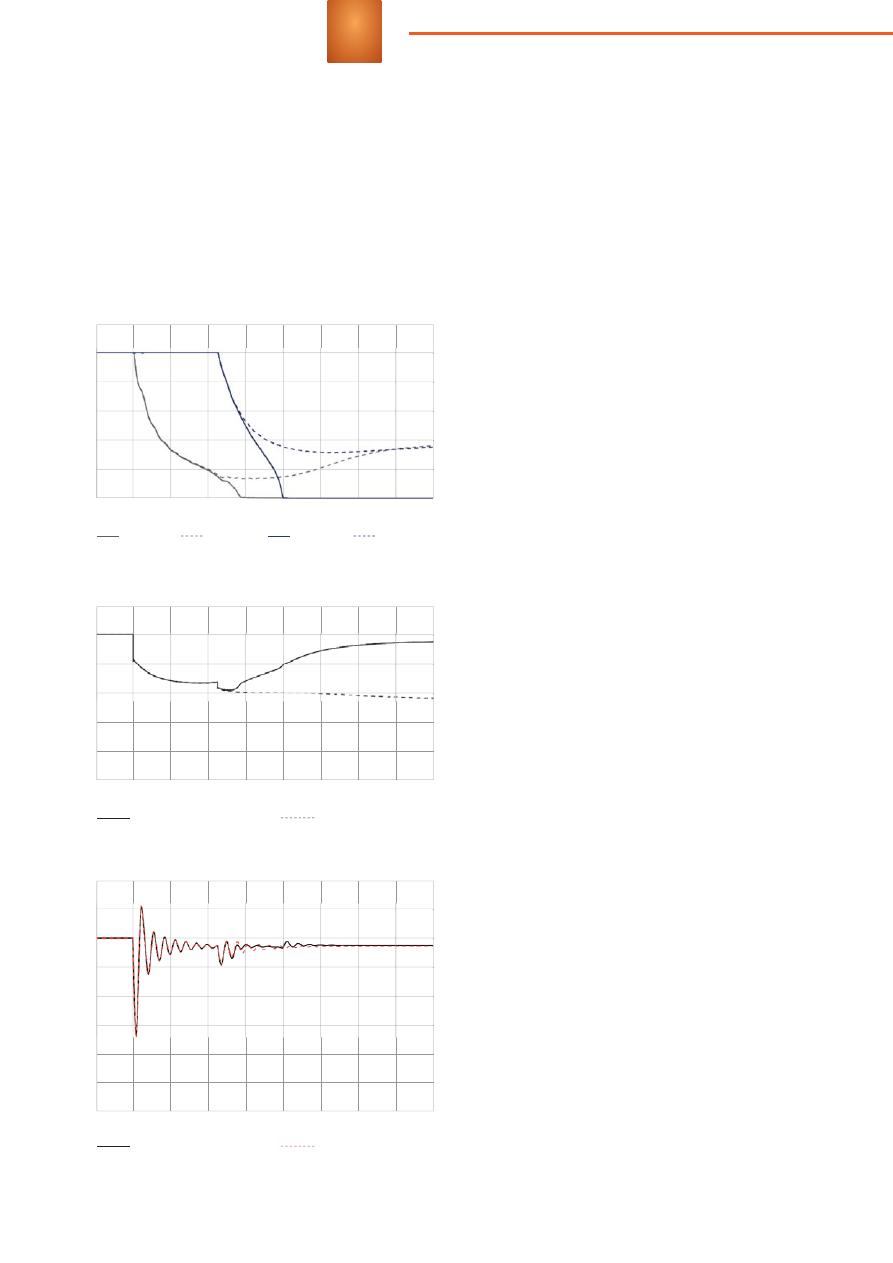
Результаты
расчетов
приводятся
на
рисунках
4–6.
На
графиках
этих
рисунков
результаты
,
полученные
с
использованием
частотно
-
зависимых
моделей
для
электрических
машин
,
выполнены
сплошными
линиями
,
для
частотно
-
независимых
—
штриховы
-
ми
линиями
.
Стоит
отметить
,
что
в
данном
случае
расчеты
проводятся
без
учета
регулирующего
фактора
со
стороны
генератора
.
Наличие
регулирования
со
стороны
генератора
улучшает
условия
пуска
,
од
-
нако
в
данной
работе
рассматривается
исключи
-
тельно
влияние
типа
модели
на
результаты
экс
-
перимента
.
Для
соблюдения
постоянства
условий
проведения
экспериментов
регулирующий
фактор
со
стороны
генератора
учтен
не
будет
,
так
как
для
этого
требуются
дополнительные
расчеты
.
Здесь
имеется
в
виду
то
,
что
в
расчетах
не
будет
учиты
-
ваться
влияние
систем
АРВ
и
АРС
генератора
.
По
результатам
эксперимента
c
использовани
-
ем
частотно
-
независимой
модели
видно
,
что
за
-
пуск
двигателей
оказался
неуспешным
—
значение
скольжения
обоих
двигателей
«
зависло
»
на
отмет
-
ке
,
примерно
равной
38%.
Это
является
следствием
того
,
что
при
запуске
асинхронный
двигатель
ока
-
зывает
серьезную
нагрузку
на
сеть
,
требуя
кратно
больше
мощности
относительно
того
количества
,
которое
он
потребляет
в
нормальном
рабочем
ре
-
жиме
.
Ступенчатый
пуск
двигателей
также
пред
-
ставляет
серьезную
нагрузку
для
генератора
,
так
как
во
время
пуска
мощного
двигателя
происходит
наброс
нагрузки
вследствие
подключения
двигате
-
ля
второй
ступени
.
Об
этом
свидетельствуют
кача
-
ния
генератора
,
которые
можно
наблюдать
на
ос
-
циллограмме
частоты
тока
на
шинах
асинхронных
двигателей
,
данная
осциллограмма
также
в
полной
мере
отражает
изменение
частоты
вращения
ге
-
нератора
во
время
переходного
процесса
.
Стоит
отметить
,
что
возмущения
в
генераторе
носят
за
-
тухающий
характер
.
Видно
,
что
возмущение
от
пу
-
ска
двигателя
первой
ступени
значительно
больше
,
чем
возмущение
от
пуска
двигателя
второй
ступе
-
ни
,
однако
это
связано
с
тем
,
что
мощность
двига
-
теля
второй
ступени
меньше
.
Результаты
эксперимента
с
использованием
ча
-
стотно
-
зависимой
модели
отличаются
.
По
кривым
,
выполненным
сплошными
линиями
,
можно
видеть
,
что
произошел
успешный
запуск
обоих
двигате
-
лей
,
однако
он
оказался
очень
затянутым
,
так
как
обычно
запуск
асинхронного
двигателя
не
превы
-
шает
4–5
секунд
.
В
случае
,
когда
пуск
асинхрон
-
ного
двигателя
оказывается
затянутым
,
возникает
опасность
перегрева
обмоток
машины
,
так
как
по
ним
протекают
токи
,
превышающие
номинальные
,
более
того
,
в
таком
случае
возникает
вероятность
срабатывания
релейной
защиты
.
Эксперименталь
-
Напряжение
на
шине
(
ЧЗМ
)
Напряжение
на
шине
(
ЧНМ
)
Частота
на
шинах
(
ЧЗМ
)
Частота
на
шинах
(
ЧНМ
)
Рис
. 5.
Напряжение
на
шинах
асинхронных
двигателей
120
100
80
60
40
20
120
100
80
60
40
20
0
0
Ск
ольжение
, %
Напр
яжение
, %
Время
,
с
Время
,
с
5 10 15 20 25 30 35 40 45
5 10 15 20 25 30 35 40 45
AD
1 (
ЧЗМ
)
AD
1 (
ЧНМ
)
AD
2 (
ЧНМ
)
AD
2 (
ЧЗМ
)
Рис
. 4.
Скольжение
асинхронных
двигателей
при
сту
-
пенчатом
пуске
102
101
100
99
98
97
96
95
94
Част
от
а
, %
Время
,
с
0
5 10 15 20 25 30 35 40 45
125
но
было
выявлено
,
что
наибольшие
различия
в
ис
-
ходах
опытов
с
использованием
разных
моделей
проявляются
в
длинных
переходных
процессах
,
со
-
провождающихся
глубокими
просадками
напряже
-
ния
.
Стоит
отметить
,
что
напряжение
,
приведенное
на
осциллограмме
асинхронных
двигателей
,
соот
-
ветствует
напряжению
на
выводах
синхронного
ге
-
нератора
,
так
как
параметры
кабельной
линии
пре
-
небрежимо
малы
.
Стоит
также
отметить
и
тот
факт
,
что
такие
режимы
могут
быть
возможны
именно
в
изолированной
сети
,
где
отсутствует
подключе
-
ние
к
шинам
условно
бесконечной
мощности
,
на
которых
частота
тока
практически
не
изменяется
во
время
пуска
.
По
осциллограммам
частоты
в
сети
и
напряже
-
ния
на
шинах
двигателей
видно
,
что
имеется
се
-
рьезная
просадка
как
по
частоте
вращения
,
так
и
по
напряжению
.
В
таком
случае
можно
сделать
вывод
,
что
самозапуск
оказался
возможен
по
той
причине
,
что
замедленный
генератор
и
пониженное
напря
-
жение
играют
роль
своеобразного
частотного
пре
-
образователя
.
ЗАКЛЮЧЕНИЕ
И
ВЫВОДЫ
В
работе
были
проведены
эксперименты
над
мо
-
делью
изолированной
сети
с
использованием
ча
-
стотно
-
зависимой
и
частотно
-
независимой
моде
-
лей
.
Было
выявлено
,
что
существуют
расчетные
случаи
,
когда
результат
симуляции
напрямую
за
-
висит
от
используемой
модели
.
Использование
частотно
-
зависимой
модели
позволяет
более
точно
моделировать
процессы
,
происходящие
во
время
пуска
асинхронных
двигателей
,
так
как
в
та
-
ком
случае
в
расчете
учитывается
изменение
со
-
противлений
элементов
в
зависимости
от
частоты
тока
в
сети
.
При
таком
подходе
реализуется
дина
-
мическое
моделирование
переходных
процессов
в
электроэнергетических
системах
,
что
является
основным
преимуществом
частотно
-
зависимой
мо
-
дели
.
Следствием
этого
может
являться
экономия
средств
,
которые
затрачиваются
на
оборудование
,
так
как
появляется
возможность
отказаться
от
до
-
полнительных
трат
на
генерирующие
установки
и
устройства
плавного
пуска
.
Внедрение
частот
-
но
-
зависимых
моделей
в
процессы
проектирова
-
ния
и
расчета
изолированных
систем
может
по
-
высить
приемистость
и
гибкость
таких
систем
,
так
как
существует
возможность
обеспечения
более
благоприятных
режимов
пусков
и
самозапусков
асинхронных
двигателей
без
привлечения
допол
-
нительных
устройств
и
систем
.
Таким
образом
,
результатом
использования
частотно
-
зависимых
моделей
при
проведении
расчетов
становится
бо
-
лее
полное
и
точное
понимание
того
,
как
в
изолиро
-
ванных
системах
происходит
использование
мощ
-
ностей
существующего
оборудования
,
что
может
вести
к
оптимизации
эксплуатации
данного
обору
-
дования
.
Стоит
отметить
,
что
необходимость
при
-
менения
расчетов
с
учетом
частотно
-
зависимых
моделей
высока
в
изолированных
энергосистемах
,
где
существует
вероятность
появления
режимов
с
глубокими
просадками
напряжения
и
частоты
на
питающих
шинах
и
,
как
следствие
,
требуется
учет
зависимостей
параметров
машин
от
частоты
.
В
результате
экспериментов
было
установле
-
но
,
что
в
изолированных
системах
есть
теорети
-
ческая
возможность
обеспечения
прямого
пуска
асинхронных
двигателей
,
соизмеримых
по
мощ
-
ности
с
генератором
,
используемым
в
системе
.
Прямой
пуск
может
быть
обеспечен
посредством
снижения
частоты
вращения
генератора
и
неболь
-
шого
снижения
напряжения
на
его
выводах
.
В
та
-
ком
случае
частично
реализуется
частотный
пуск
двигателей
.
Однако
для
полного
подтверждения
такой
возможности
при
расчете
системы
следует
использовать
исключительно
частотно
-
зависимые
модели
.
Кроме
того
,
для
проверки
возможности
та
-
ких
пусков
на
практике
требуется
моделирование
реальной
сети
с
учетом
всех
используемых
в
ней
устройств
.
ЛИТЕРАТУРА
/ REFERENCES
1. Ansuj S., Shokooh F., Schinzinger R.
Parameter estimation for induction
machines based on sensitivity analy-
sis. Record of Conference Papers.,
Industrial Applications Society 35th
Annual Petroleum and Chemical In-
dustry Conference, 12-14 Septem-
ber 1988. URL: https://ieeexplore.
ieee.org/document/22415.
2. Falahi M., Butler-Purry K.L., Ehsani
M. Induction Motor Starting in Island-
ed Microgrids. IEEE Transactions on
Smart Grid, Sept. 2013, vol. 4, no. 3,
pp. 1323-1331. URL: https://ieeex-
plore.ieee.org/document/6576234.
3. Wigington A.J. A Comparison of In-
duction Motor Starting Methods Be-
ing Powered by a DieselGenerator
Set. URL: https://digitalcommons.
unl.edu/elecengtheses/8/.
4. ETAP.
Руководство
пользователя
программного
комплекса
/ ETAP.
Software package user manual. URL:
https://www.se.com/ru/ru/product-
range/57434544-etap/#overview.
5. Rajinder, Sreejeth M., Singh M. Sen-
sitivity analysis of induction motor
performance variables. 2016 IEEE
1st International Conference on
Power Electronics, Intelligent Control
and Energy Systems (ICPEICES),
04-06 July 2016. URL: https://ieeex-
plore.ieee.org/document/7853609.
6. Milano F., Manjavacas Á.O. Fre-
quency-Dependent Model for Tran-
sient Stability Analysis. IEEE Trans-
actions on Power Systems, Jan.
2019, vol. 34, no. 1, pp. 806-809.
URL: https://ieeexplore.ieee.org/
document/8470155.
7. Kay J.A., Paes R.H., Seggewiss
J.G., Ellis R.G. Methods for the con-
trol of large medium-voltage mo-
tors: Application considerations and
guidelines. IEEE Trans. Ind. Appl.,
1999, vol. 36, no. 6, pp. 1688-1696.
URL: https://ieeexplore.ieee.org/
document/887223.
8. Hasan S., Muttaqi K., Bhattarai R.,
Kamalasadan S. (2018). A Coordi-
nated Control Approach for Mitiga-
tion of Motor Starting Voltage Dip
in Distribution Feeders. 2018 IEEE
Industry Applications Society Annual
Meeting (IAS). URL: https://ieeex-
plore.ieee.org/document/8544554.
№
1 (76) 2023
Оригинал статьи: Применение частотно-зависимых моделей при расчетах электромеханических переходных процессов в изолированных энергосистемах
В статье рассмотрено влияние частотно-зависимых моделей электрических машин на расчеты электромеханических переходных процессов в изолированных энергосистемах. Установлена важность учета частотной зависимости при расчете в среднеквадратичных величинах для расчета пусков асинхронных двигателей с прямым пуском в тяжелых условиях.