
46
э
н
е
р
г
о
с
н
а
б
ж
е
н
и
е
энергоснабжение
П
ричинами
возникновения
системных
аварий
нередко
являются
нарушения
устойчивости
по
напряжению
вслед
-
ствие
образования
локальных
дефи
-
цитов
реактивной
мощности
в
узлах
нагрузки
.
Непрогнозируемые
изменения
нагрузки
потре
-
бителей
в
совокупности
с
аварийными
возмуще
-
ниями
являются
триггерами
неустойчивости
по
напряжению
.
Дефицит
пропускной
способности
ЛЭП
к
удаленным
узлам
нагрузки
и
отсутствие
источников
реактивной
мощности
в
них
также
может
привести
к
лавине
напряжения
.
Помимо
наличия
резервов
реактивной
мощности
в
ЭЭС
требуется
их
координация
для
правильного
рас
-
пределения
по
узлам
нагрузки
за
наименьшее
время
.
При
используемом
в
ЕЭС
России
про
-
тивоаварийном
управлении
(
ПАУ
)
сделать
это
достаточно
трудно
,
так
как
традиционные
мето
-
ды
могут
оказаться
несвоевременными
или
не
-
эффективными
,
что
в
некоторых
случаях
может
способствовать
развитию
аварии
[1–3].
Модели
и
системы
на
основе
искусственного
интеллекта
(
ИИ
)
предполагают
дополнение
су
-
ществующих
средств
ПАУ
,
повышая
тем
самым
Реуцкий
И
.
С
.,
старший
диспетчер
ОДС
филиала
АО
«
СО
ЕЭС
» —
«
Региональное
диспетчерское
управление
энергосистемы
Иркутской
области
»
Томин
Н
.
В
.,
к
.
т
.
н
.,
старший
научный
сотрудник
,
заведующий
лабораторией
управления
функционированием
электроэнергетических
систем
ИСЭМ
СО
РАН
Курбацкий
В
.
Г
.,
д
.
т
.
н
.,
профессор
,
главный
научный
сотрудник
ИСЭМ
СО
РАН
Ключевые
слова
:
устойчивость
по
напряжению
,
регулирование
напряжения
,
автоматика
,
роевой
интеллект
,
мультиагентная
система
,
машинное
обучение
Повышение устойчивости
по напряжению сложных энергосистем
с использованием моделей адаптивной
интеллектуальной автоматики
на примере северной части
энергосистемы Иркутской области
УДК
621.311:004.855
Как
показывает
практика
,
принципы
существующей
структуры
противоаварийного
управления
(
ПАУ
)
в
ЕЭС
России
как
сред
-
ства
предотвращения
нарушения
устойчивости
по
напряжению
не
позволяют
выполнять
корректное
ПАУ
в
нерасчетных
режи
-
мах
и
при
ненормативных
возмущениях
,
которые
возникают
при
системных
авариях
.
Эффективным
решением
может
стать
дополнение
существующей
системы
ПАУ
интеллектуальными
комплексами
.
В
статье
предложена
концепция
новой
интел
-
лектуальной
автоматики
регулирования
напряжения
и
реак
-
тивной
мощности
(
ИАРН
)
в
ЭЭС
,
использующей
мультиагент
-
ные
технологии
для
предотвращения
нарушения
устойчивости
по
напряжению
.
Предложенная
модель
ИАРН
реализует
две
мультиагентные
подсистемы
адаптивной
настройки
регулято
-
ров
напряжения
:
систему
регулирования
уставок
автоматики
регулирования
возбуждения
синхронных
генераторов
и
систему
управления
средствами
компенсации
реактивной
мощности
,
построенной
по
принципу
виртуальной
электростанции
.
Эффек
-
тивность
предложенной
ИАРН
продемонстрирована
на
примере
реальной
схемы
Бодайбинского
энергетического
кольца
север
-
ной
части
энергосистемы
Иркутской
области
,
в
котором
могут
возникать
проблемы
с
устойчивостью
по
напряжению
.
Рассма
-
тривается
концепция
внедрения
предложенной
ИАРН
в
суще
-
ствующую
систему
ПАУ
ЕЭС
России
.
47
МПА
ВЭ
-
СКРМ
EMS-SCADA
ВЭ
L
-
индексы
Оптимальные
инъекции
Q
Измерения
Оптималь
-
ные
уставки
СКРМ
Локальная
информация
(
токи
статора
,
ротора
,
напряжения
,
локальные
сигналы
отключения
)
Регулирование
уставки
АРВ
Регулирование
уставки
АРВ
Регулирование
уставки
АРВ
сигнал
измерений
сигнал
УВ
Генератор
n
Генератор
2
Генератор
1
Агент
2
Агент
1
Агент
N
АРВ
1
АРВ
2
АРВ
n
ЭЭС
СКРМ
1
СКРМ
2
СКРМ
m
их
интеллектуальный
уровень
.
Разработки
послед
-
них
лет
связаны
с
применением
систем
децентра
-
лизованного
мультиагентного
управления
[4–7],
об
-
ладающих
хорошей
отказоустойчивостью
и
высокой
адаптивностью
при
выдаче
управляющих
воздей
-
ствий
(
УВ
).
Другим
перспективным
подходом
явля
-
ется
развитие
интеллектуальных
систем
централи
-
зованного
управления
,
основанных
на
сочетании
традиционных
методов
с
технологиями
машинного
обучения
и
эвристической
оптимизации
[8, 9].
Этот
подход
позволяет
значительно
ускорить
и
автомати
-
зировать
решение
задачи
оценки
устойчивости
ЭЭС
по
напряжению
на
основе
характерных
индикаторов
.
Также
возможна
комбинация
этих
систем
в
целях
бо
-
лее
эффективного
управления
[10, 11].
Применение
таких
систем
в
ЕЭС
России
позволит
значительно
повысить
устойчивость
ЭЭС
,
способствуя
развитию
уровня
интеллектуализации
сетей
и
достижению
це
-
лей
цифровой
трансформации
ЕЭС
России
.
КОНЦЕПЦИЯ
АДАПТИВНОЙ
ИНТЕЛЛЕКТУАЛЬНОЙ
АВТОМАТИКИ
УПРАВЛЕНИЯ
НАПРЯЖЕНИЕМ
И
РЕАКТИВНОЙ
МОЩНОСТЬЮ
В
настоящее
время
при
режимном
управлении
сис
-
темные
операторы
во
всем
мире
все
еще
широко
ис
-
пользуют
«
ручной
»
принцип
(
или
принцип
встречного
регулирования
)
управления
реактивной
мощностью
,
который
включает
оперативную
корректировку
уста
-
вок
по
напряжению
,
а
также
загрузки
генераторов
по
реактивной
мощности
в
соответствии
с
плановым
графиком
,
включение
и
отключение
батарей
стати
-
ческих
конденсаторов
(
БСК
)
и
управляемых
шунти
-
рующих
реакторов
(
УШР
),
перенастройка
уставок
FACTS
и
автоматики
регулирования
коэффициента
трансформации
(
АРКТ
)
на
регулирования
транс
-
форматора
под
нагрузкой
(
РПН
).
Часть
данных
за
-
дач
может
решаться
локальными
автоматическими
устройствами
.
Противоаварийное
управление
напряжением
и
реак
-
тивной
мощностью
в
ЭЭС
традиционно
осущест
-
вляется
локальными
системами
противоаварийной
автоматики
(
ПА
).
В
этом
случае
ключевыми
элемен
-
тами
являются
различные
локальные
автоматики
,
призванные
обеспечить
устойчивость
динамиче
-
ского
перехода
к
новому
установившемуся
режиму
,
а
именно
:
–
обеспечивающие
автоматическое
резкое
нара
-
щивание
выработки
реактивной
мощности
при
коротких
замыканиях
—
форсировка
возбуждения
автоматики
регулирования
возбуждения
(
АРВ
)
и
устройства
FACTS;
–
обеспечивающие
автоматическое
включение
средства
компенсации
реактивной
мощности
(
СКРМ
)
и
/
или
отключение
потребителей
по
факту
резкого
снижения
напряжения
(
автоматика
огра
-
ничения
снижения
напряжения
—
АОСН
).
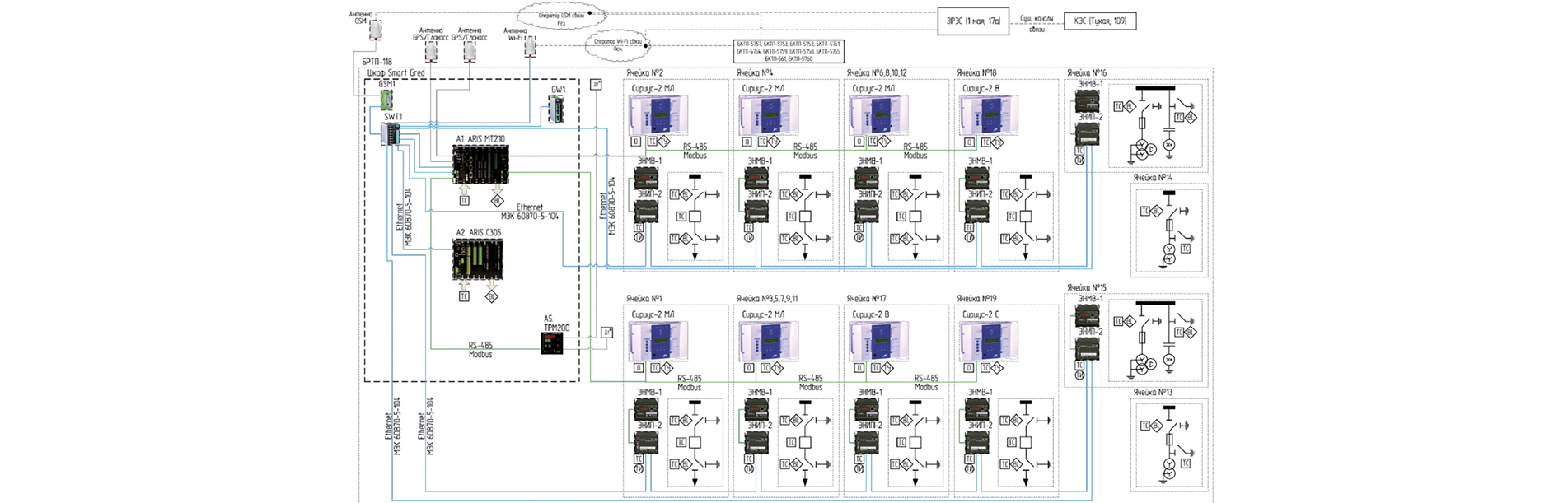
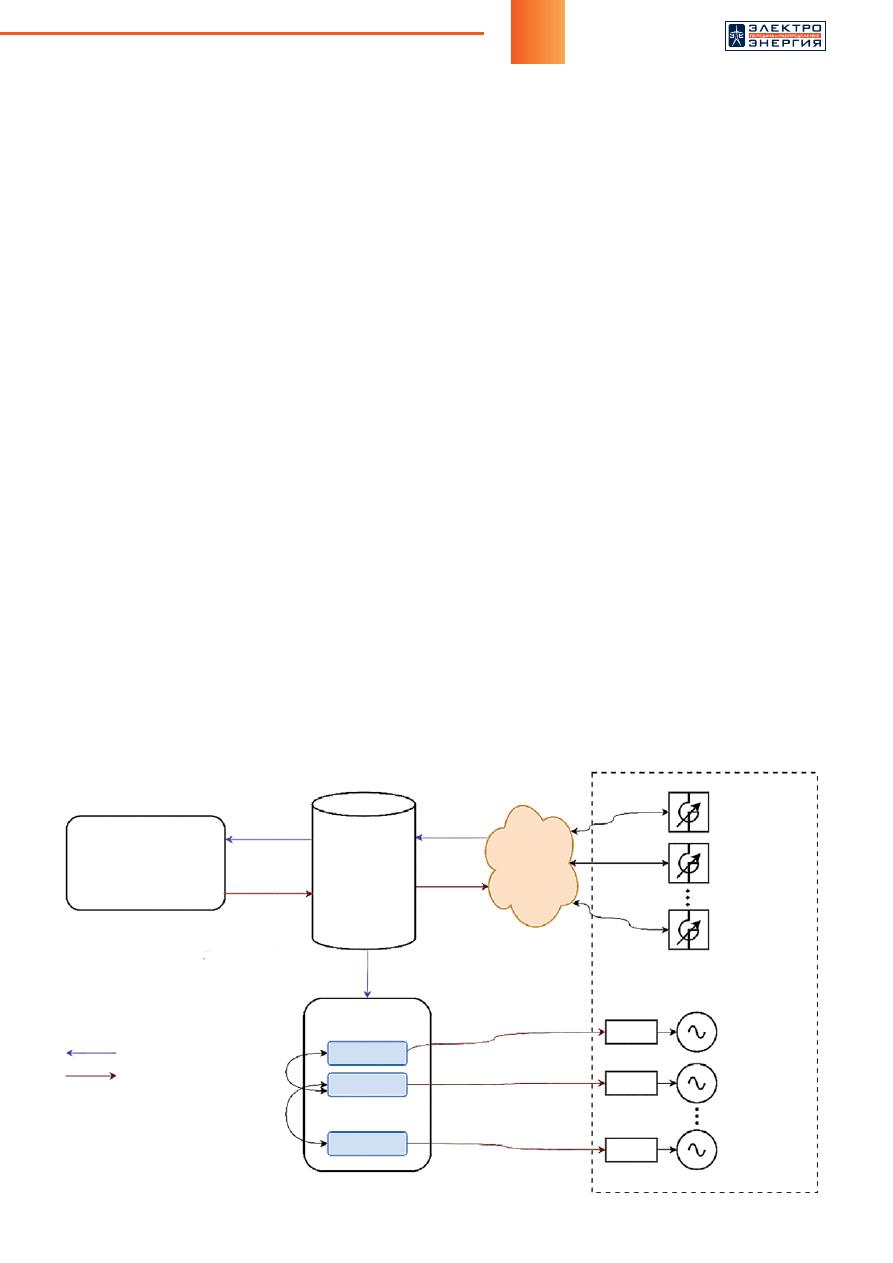
Для
целей
режимного
и
противоаварийного
управления
напряжением
и
реактивной
мощностью
в
работе
использовано
сочетание
двух
подходов
для
разработки
модели
интеллектуальной
автоматики
регулирования
напряжения
(
ИАРН
) (
рисунок
1).
В
работе
использована
концепция
предаварийного
управления
,
предложенная
в
[1],
которая
рассматри
-
вается
как
промежуточное
звено
между
оперативно
-
диспетчерским
и
противоаварийным
управлением
.
Основной
целью
такого
управления
является
раннее
предупреждение
и
предотвращение
опасных
состоя
-
ний
режима
и
аварийных
ситуаций
прежде
,
чем
они
приведут
к
крупной
системной
аварии
.
Таким
образом
,
предаварийное
управление
представляет
своеобраз
-
ный
«
нулевой
эшелон
»
в
общей
системе
противоава
-
рийного
управления
и
позволяет
«
отвести
»
систему
от
границ
неустойчивости
.
Рис
. 1.
Общая
схема
гибридной
модели
автоматики
ИАРН
с
подсистемами
МПА
и
ВЭ
-
СКРМ
№
2 (77) 2023

48
ЭНЕРГОСНАБЖЕНИЕ
Ввиду
того
что
одним
из
основных
требований
к
новым
системам
ПАУ
является
отказоустойчи
-
вость
,
выполнение
ИАРН
сугубо
централизованной
существенно
снижает
данное
требование
.
Поэтому
для
адаптивного
регулирования
уставок
АРВ
син
-
хронных
генераторов
предлагается
модель
децен
-
трализованной
мультиагентной
противоаварийной
автоматики
,
где
генераторы
используются
в
каче
-
стве
агентов
.
Роль
автоматики
для
децентрализо
-
ванно
-
централизованного
управления
СКРМ
вы
-
полняет
подсистема
на
основе
роевого
интеллекта
и
машинного
обучения
,
реализованная
по
принципу
виртуальной
электростанции
(
ВЭ
).
Роевый
интел
-
лект
в
данном
случае
рассматривается
как
много
-
уровневая
мультиагентная
система
,
реализующая
глобальное
децентрализованное
поведение
через
взаимодействие
агентов
[12].
Таким
образом
ИАРН
включает
две
составляющие
:
1)
децентрализованную
мультиагентную
противо
-
аварийную
автоматику
(
МПА
)
для
регулирования
уставок
АРВ
синхронных
генераторов
;
2)
децентрализованно
-
централизованную
мультиагент
-
ную
автоматику
координации
дискретных
устройств
СКРМ
на
базе
концепции
ВЭ
(
ВЭ
-
СКРМ
).
МОДЕЛЬ
МУЛЬТИАГЕНТНОЙ
ПРОТИВОАВАРИЙНОЙ
АВТОМАТИКИ
РЕГУЛИРОВАНИЯ
АРВ
ГЕНЕРАТОРОВ
Существенное
снижение
напряжения
с
одновремен
-
ным
увеличением
выработки
реактивной
мощности
синхронными
машинами
были
предложены
в
раз
-
личных
работах
в
качестве
индикаторов
критической
ситуации
,
предшествующей
лавине
напряжения
[1].
В
предкритической
ситуации
резкое
увеличение
вы
-
работки
реактивной
мощности
будет
сопровождать
-
ся
токовой
перегрузкой
генераторов
.
Таким
образом
,
фиксация
приближения
токов
статоров
или
роторов
генераторов
в
контролируемой
подсистеме
к
около
-
критическим
значениям
может
быть
использована
для
выявления
критической
ситуации
и
запуска
рас
-
пределенной
противоаварийной
автоматики
.
В
общем
виде
закон
регулирования
современных
отечественных
АРВ
сильного
действия
может
быть
представлен
следующим
выражением
[13]:
dU
G
U
f
=
U
f
0
+
K
0
U
(
U
0
–
U
G
) –
K
1
U
–
dt
di
f
d
–
K
1
if
+
K
0
K
1
. (1)
dt
dt
При
исследовании
лавины
напряжения
основной
интерес
представляет
длительная
перегрузка
сис
-
темы
возбуждения
,
а
не
сохранение
устойчивости
параллельной
работы
в
первом
цикле
качаний
,
для
чего
предполагается
оптимальная
настройка
коэф
-
фициентов
по
производным
соответствующих
пере
-
менных
состояния
системы
.
В
связи
с
этим
можно
использовать
упрощенную
модель
АРВ
[1],
содержа
-
щую
пропорциональный
канал
по
отклонению
и
ста
-
билизирующий
канал
по
производной
напряжения
статора
:
dU
G
U
f
=
U
f
0
+
K
0
U
(
U
0
–
U
G
) –
K
1
U
. (2)
dt
При
анализе
лавины
напряжения
,
помимо
закона
регулирования
(2)
требуется
также
учесть
перегру
-
зочную
способность
системы
возбуждения
.
Режим
поддержания
напряжения
АРВ
на
заданном
уровне
возможен
до
тех
пор
,
пока
значения
токов
статора
и
ротора
находятся
в
допустимых
пределах
[13]:
I
G
I
DOP
=
k
I
·
I
NOM
, (3)
i
f
MIN
i
f
i
f
DOP
=
k
E
·
i
f
NOM
, (4)
где
k
I
и
k
E
—
максимально
допустимые
(
с
учетом
вре
-
мени
)
кратности
перегрузки
по
токам
статора
и
ро
-
тора
соответственно
;
I
DOP
и
I
NOM
—
соответственно
максимально
допустимый
(
с
учетом
времени
)
и
но
-
минальный
токи
статора
;
i
f
MIN
,
i
f
DOP
и
i
f
NOM
—
мини
-
мальный
,
максимально
допустимый
(
с
учетом
вре
-
мени
)
и
номинальный
токи
ротора
соответственно
.
Обычно
выполнение
условия
(4)
контролирует
-
ся
дежурным
персоналом
станции
в
соответствии
с
имеющимися
инструкциями
.
В
том
случае
,
если
ток
статора
превышает
максимально
допустимый
,
пер
-
сонал
снижает
уставку
АРВ
по
напряжению
,
что
при
-
водит
к
уменьшению
выдачи
реактивной
мощности
и
в
большинстве
случаев
к
снижению
тока
статора
генератора
.
Однако
при
приближении
к
лавине
на
-
пряжения
наблюдается
обратный
эффект
,
то
есть
при
снижении
уставки
АРВ
происходит
увеличение
тока
статора
.
Данный
эффект
наблюдался
и
при
развитии
Московской
аварии
в
2005
году
,
когда
пер
-
сонал
станции
пытался
выполнить
разгрузку
гене
-
раторов
путем
снижения
уставки
АРВ
,
что
вопреки
ожиданиям
только
ухудшило
ситуацию
[5].
При
этом
контроль
тока
ротора
также
обеспечивается
авто
-
матикой
,
входящей
в
состав
АРВ
.
Если
ток
возбуж
-
дения
превысит
предельно
допустимое
значение
,
сработает
ограничитель
перегрузки
(
ОП
),
который
уменьшит
уставку
АРВ
до
уровня
,
обеспечивающего
достаточно
быстрое
снижение
температуры
ротора
.
Предлагаемая
модель
МПА
обеспечивает
управле
-
ние
реактивной
мощностью
,
предотвращает
аварий
-
ное
отключение
генераторов
и
сохраняет
напряжение
на
шинах
нагрузки
в
допустимых
пределах
.
МПА
всту
-
пает
в
работу
при
приближении
токов
статоров
или
роторов
генераторов
в
контролируемой
подсистеме
к
околокритическим
значениям
,
согласно
условиям
(3)
и
(4).
МПА
состоит
из
двух
типов
агентов
:
агенты
на
-
грузки
(
АН
)
и
агенты
генерации
(
АГ
).
В
этом
случае
синхронные
генераторы
ЭЭС
выступают
в
качестве
АГ
,
которые
получают
следующую
локальную
инфор
-
мацию
:
величины
токов
статоров
и
роторов
генерато
-
ров
,
первичные
и
вторичные
напряжения
на
шинах
станции
,
локальные
сигналы
фиксации
отключения
оборудования
,
номера
отпаек
регуляторов
напряже
-
ния
генераторных
трансформаторов
.
Если
величина
тока
статора
или
ротора
превышает
максимально
допустимое
значение
(
приближается
к
предельной
величине
),
то
АГ
пытается
исключить
возможность
отключения
генератора
вследствие
перегрузки
.
Для
этого
он
отправляет
сообщения
сторонним
агентам
,
которые
в
состоянии
снизить
дефицит
реактивной
мощности
в
подсистеме
.
Сторонние
АГ
могут
снизить
дефицит
за
счет
повышения
уставки
АРВ
.
Условием
возникновения
перегрузки
генератора
является
уве
-
49
личение
текущей
генерации
реактивной
мощности
свыше
максимального
значения
(
Q
g
–
Q
g
max
> 0).
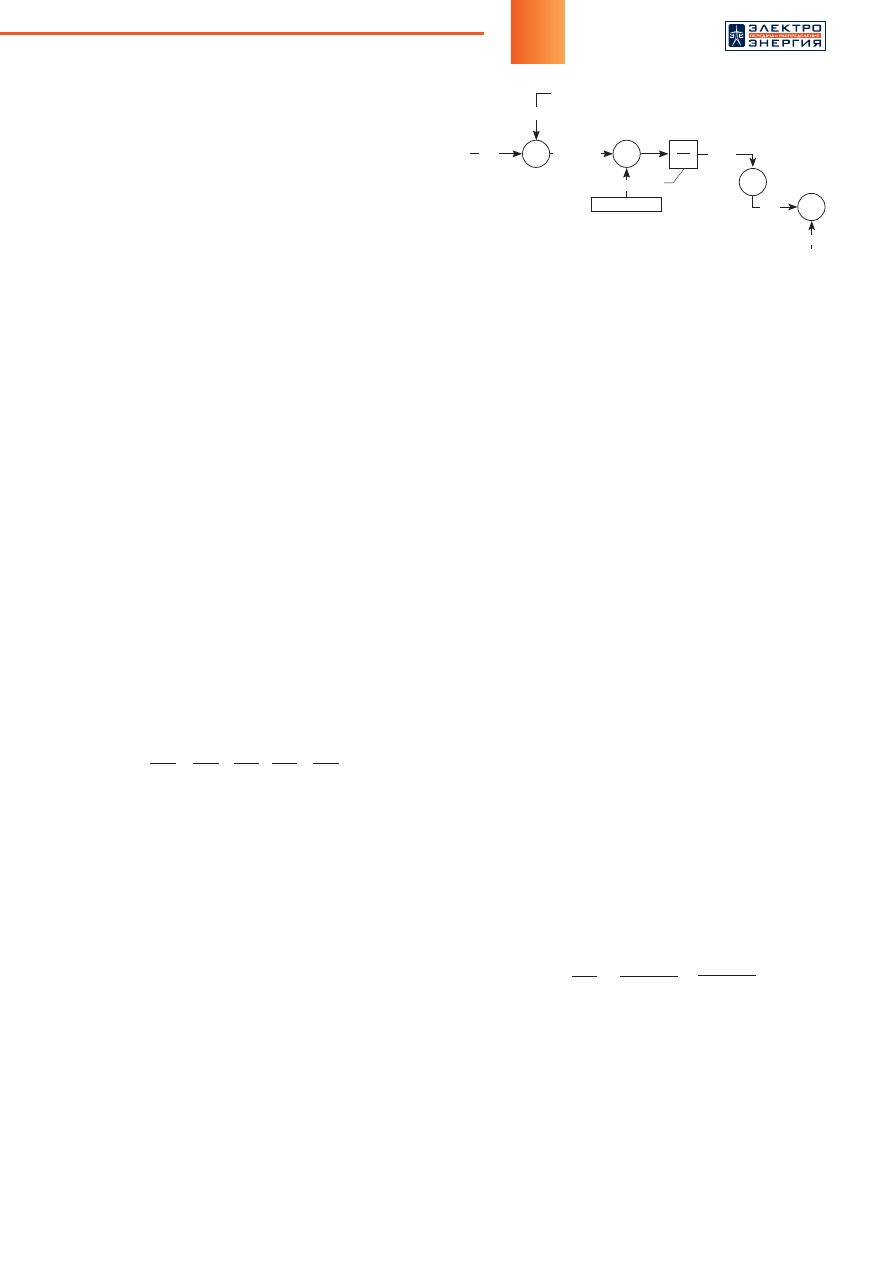
В
разработанной
программе
действие
ОП
моде
-
лируется
путем
последовательного
плавного
сниже
-
ния
уставки
по
напряжению
PU
-
узла
(
рисунок
2).
Если
в
работу
вводится
МПА
,
то
канал
ОП
может
блокиро
-
ваться
,
тем
самым
исключается
возможность
сниже
-
ния
напряжения
и
,
как
следствие
,
предотвращения
лавины
напряжения
в
сети
.
Однако
в
этом
случае
за
снятие
перегрузки
генератора
отвечает
предложен
-
ная
модель
МПА
.
Такая
блокировка
требуется
только
для
проведения
сравнительных
испытаний
.
Кроме
того
,
для
повышения
быстродействия
с
од
-
новременным
сохранением
простоты
реализации
процедура
отключения
нагрузки
(
ОН
),
контролиру
-
ющая
состояние
послеаварийного
режима
,
должна
использовать
менее
сложные
принципы
работы
,
на
-
пример
по
сравнению
с
оптимизационными
расчета
-
ми
УВ
.
Поэтому
дополнительно
в
МПА
могут
зада
-
ваться
АН
,
которые
принимают
участие
в
процедуре
отключения
нагрузки
,
в
том
числе
реализуя
эту
про
-
цедуру
независимо
в
случае
критического
снижения
напряжения
на
шинах
его
подстанции
(
реализация
стандартной
автоматики
ограничения
снижения
на
-
пряжения
—
АОСН
).
Однако
прежде
чем
перейти
к
отключению
нагрузки
,
то
есть
к
реализации
проти
-
воаварийных
управляющих
воздействий
,
МПА
пыта
-
ется
перераспределить
реактивную
мощность
с
це
-
лью
снятия
локальных
перегрузок
агрегатов
.
Знания
агента
о
подсистеме
формируются
в
виде
базы
знаний
с
использованием
подхода
,
основан
-
ного
на
анализе
чувствительности
коэффициентов
матрицы
Якоби
уравнений
установившегося
режи
-
ма
[14].
Полагая
неизменными
инъекции
активной
мощности
(
P
= 0),
коэффициенты
чувствительности
определятся
как
:
Q
Q
Q
P
–1
P
=
–
, (5)
U
U
U
где
P
,
Q
,
,
U
—
соответственно
,
векторы
инкре
-
ментных
изменений
инъекций
активной
и
реактивной
мощности
,
а
также
углов
и
напряжений
в
узлах
ЭЭС
.
МОДЕЛЬ
АВТОМАТИКИ
РЕГУЛИРОВАНИЯ
СКРМ
НА
БАЗЕ
КОНЦЕПЦИИ
ВЭ
Традиционный
подход
ко
вторичному
регулированию
является
более
простым
с
точки
зрения
реализации
,
однако
обеспечивает
меньший
уровень
автоматиза
-
ции
процессов
.
Он
заключается
в
установке
большо
-
го
количества
СКРМ
в
ЭЭС
,
которые
используются
для
поддержания
напряжения
в
передающей
части
сети
в
часы
прохождения
пика
нагрузки
,
а
также
в
случае
возникновения
аварийных
ситуаций
.
Коор
-
динированный
подход
основан
на
разделении
сис
-
темы
на
районы
управления
с
последующим
внед
-
рением
средств
координации
реактивной
мощности
в
каждой
из
подсистем
[15].
При
разработке
модели
автоматики
ВЭ
-
СКРМ
предлагается
объединить
преимущества
вышеопи
-
санных
подходов
посредством
технологии
ВЭ
,
кон
-
цепция
которой
обычно
предполагает
объединение
совокупности
распределенных
генераторов
для
со
-
Рис
. 2.
Схема
канала
управления
с
выбором
ОП
и
МПА
в
качестве
снятия
перегрузки
генератора
ЭЭС
O
max
O
g
«+»
«+»
«–»
O
g
–
O
max
IsMASOFF
1/0
K
T
s
U
ref
U
ref
«–»
0
здания
системы
согласованно
работающих
устройств
,
управляемой
и
контролируемой
из
единого
центра
.
Обычно
ВЭ
рассматривается
как
виртуальный
кла
-
стер
распределенных
источников
активной
мощности
с
целью
обеспечения
энергетической
гибкости
при
использовании
генерации
или
доступной
мощности
потребителя
.
Распределенный
характер
такой
поста
-
новки
делает
ее
идеальной
для
парадигмы
мультиа
-
гентной
системы
.
Концепция
ВЭ
с
мультиагентным
регулированием
может
также
быть
применена
для
координирован
-
ного
управления
СКРМ
(
БСК
,
УШР
и
т
.
п
.)
для
целей
вторичного
регулирования
напряжения
в
ЭЭС
[16].
Однако
,
в
отличие
от
подсистемы
МПА
,
распреде
-
ленное
регулирование
СКРМ
в
рамках
платформы
ВЭ
предполагает
централизованную
координацию
.
Такая
постановка
может
быть
успешно
реализова
-
на
на
базе
мультиагентной
системы
,
построенной
на
принципе
роевого
интеллекта
[17],
где
глобальная
цель
такого
«
интеллекта
»
заключается
в
миними
-
зации
некой
целевой
функции
с
определенным
на
-
бором
ограничений
.
При
этом
поведение
,
свойства
и
структура
на
коллективном
уровне
порождаются
только
локальными
взаимодействиями
агентов
[18].
В
статье
в
качестве
такой
функции
предлагает
-
ся
использовать
один
из
эффективных
индикаторов
устойчивости
по
напряжению
—
сумму
L
-
индексов
,
значения
которого
необходимо
минимизировать
для
обеспечения
требуемого
уровня
надежности
.
L-
индекс
является
эффективной
количественной
мерой
устой
-
чивости
ЭЭС
,
позволяющей
определить
,
как
далеко
текущее
состояние
системы
от
точки
лавины
по
на
-
пряжению
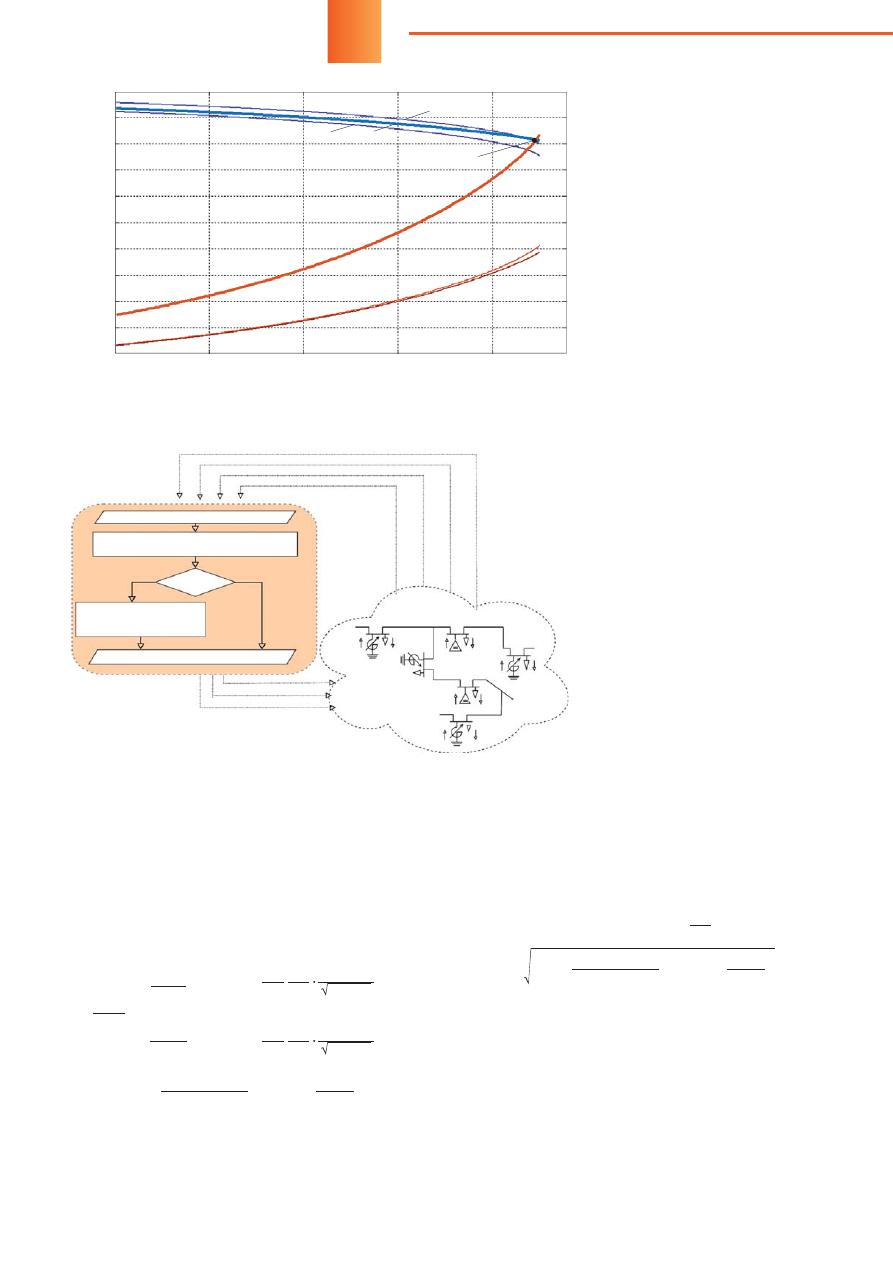
[19] (
рисунок
3).
Данный
индекс
меняется
в
диапазоне
от
0 (
режим
холостого
хода
)
до
1 (
коллапс
напряжения
)
и
может
быть
рассчитан
по
формуле
:
U
∙
0
j
S
∙
j
+
S
j
+
L
j
=
1 +
=
=
,
(6)
U
∙
j Y
∙
jj
+
*
∙
U
j
2
Y
jj
+
∙
U
j
2
где
Y
jj
+
—
комплексно
-
сопряженные
элементы
преоб
-
разованной
матрицы
проводимости
;
U
∙
j
—
комплекс
-
ное
напряжение
,
зависящее
от
узловой
мощности
S
∙
j
и
эквивалентной
мощности
S
∙
j
corr
;
U
∙
0
j
—
эквивалентное
напряжение
;
S
∙
J
+
—
преобразованная
комплексно
-
со
-
пряженная
мощность
.
На
основе
метода
расчета
L
-
индекса
в
[20]
пред
-
ложен
общий
аналитический
алгоритм
оптимизации
по
реактивной
мощности
,
который
позволяет
опре
-
делить
объем
необходимых
инъекции
реактивной
мощности
Q
I
для
i
-
го
нагрузочного
узла
для
работы
№
2 (77) 2023
50
ЭНЕРГОСНАБЖЕНИЕ
электрической
сети
в
оптимальном
установившемся
режиме
.
Такие
корректирующие
воздействия
позво
-
ляют
обеспечить
необходимый
уровень
режимной
надежности
системы
и
избежать
проблем
с
устойчи
-
востью
по
напряжению
.
Для
этого
необходимо
решить
систему
уравнений
относительно
частных
производных
функции
суммы
локальных
L
-
индексов
,
L
sum
по
Q
I
для
корректировки
доступных
в
ЭЭС
СКРМ
.
L
sum
Q
=
L
sum
Q
1
L
sum
Q
m
=
1
U
j
X
j
1
U
1
2
+
2
1
U
j
X
jm
m
2
+
2
i
L
–
i
j
i
L
–
i
j
= 0, (7)
где
,
=
=
(
Q
i
+
Q
i
)
X
ji
U
i
–
P
i
X
ji
U
i
i
L
i
j
i
L
i
j
;
P
i
,
Q
i
—
активная
и
реактивная
мощности
нагрузки
узла
соответ
-
ственно
;
X
ji
—
реактивное
сопротивление
между
нагру
-
зочными
узлами
j
и
i
;
m
—
количество
доступных
СКРМ
.
В
результате
определяется
экстремум
функции
L
sum
,
и
поскольку
она
является
выпуклой
,
то
ее
экстремаль
-
ное
значение
будет
являться
минимальным
.
В
итоге
сформулированная
модель
цен
-
трализованной
автоматики
регули
-
рования
C
КРМ
на
базе
концепции
ВЭ
может
быть
представлена
об
-
щей
схемой
(
рисунок
4).
Для
решения
системы
уравне
-
ний
(7)
предлагается
использовать
быстрые
решатели
на
основе
эм
-
пирического
алгоритма
роевого
ин
-
теллекта
(
метод
мотылька
и
пла
-
мени
(
ММП
)),
а
также
алгоритма
градиентного
бустинга
CatBoost
для
ускорения
решений
от
ММП
.
Выбор
алгоритма
ММП
об
-
условлен
тем
,
что
по
сравнению
с
другими
роевыми
алгоритмами
его
сходимость
наивысшая
,
то
есть
оптимальное
решение
дости
-
гается
за
наименьшее
количество
итераций
[21, 22].
Главными
эле
-
ментами
алгоритма
ММП
являют
-
ся
мотыльки
и
пламя
,
которые
со
-
ответствуют
решениям
.
Мотыльки
являются
поисковыми
агентами
,
которые
перемещаются
в
про
-
странстве
решений
,
в
то
время
как
пламя
—
лучшие
на
текущий
момент
найденные
решения
.
Все
мотыльки
осуществляют
поиск
вокруг
пламени
и
перемещают
пламя
в
новое
положение
,
если
найдено
лучшее
решение
.
Такой
процесс
поиска
гарантирует
на
-
хождение
глобального
решения
оптимизационной
задачи
.
Стра
-
тегически
в
процессе
миграции
агенты
движутся
таким
образом
,
чтобы
приблизиться
к
глобально
-
му
экстремуму
фитнес
-
функции
.
Для
нахождения
оптимальных
инъекций
Q
i
мы
стремимся
минимизировать
сумму
локальных
L
-
индексов
,
L
sum
,
то
есть
найти
экстремум
функ
-
ции
L
sum
согласно
(7).
В
этом
случае
фитнес
-
функ
-
ция
для
задачи
нахождения
оптимальных
уставок
СКРМ
может
быть
записана
следующим
образом
:
1
F
=
L
sum
=
m
j
=1
1 –
U
j
.
(8)
2
i
L
i
j
i
L
i
j
+
(
Q
i
+
Q
i
)
X
ji
U
i
2
–
P
i
X
ji
U
i
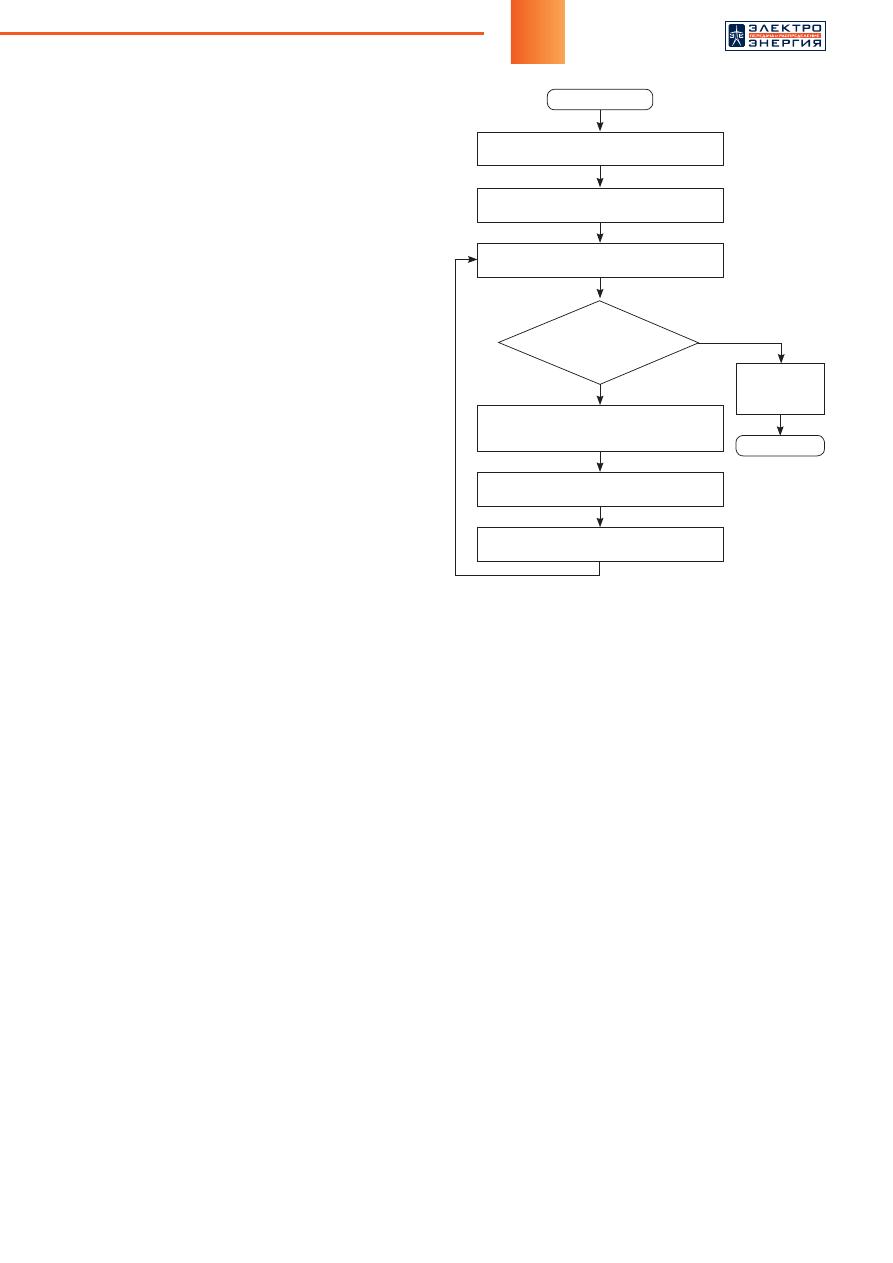
Механизм
работы
данного
алгоритма
ММП
при
-
менительно
к
решаемой
в
данной
работе
задаче
приведен
на
рисунке
5.
Предложенный
оптимизационный
решатель
на
основе
МПП
как
основной
элемент
предложенной
централизованной
автоматики
предполагает
бы
-
стрый
расчет
дополнительных
инъекции
реактив
-
ной
мощности
Q
i
для
СКРМ
,
согласно
условию
:
t
расч
t
кр
, (9)
где
t
расч
—
время
расчета
алгоритмом
ММП
инъекций
реактивной
мощности
для
всех
регулируемых
ИРМ
Рис
. 3.
Значения
напряжения
и
локального
L
-
индекса
в
нагрузочных
узлах
6-
узловой
схемы
IEEE
при
увеличении
нагрузки
1,1
1
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
50 100 150 200
Напр
яжения
,
о
.
е
. /
L
-
индек
с
U
4
U
5
L
5
=
L
max
L
4
L
6
U
6
Точка
коллапса
Состояния
тестовой
схемы
в
зависимости
от
нагрузки
Рис
. 4.
Общая
схема
реализуемой
централизованной
ВЭ
-
СКРМ
Измерения
,
расчетные
значения
индексов
устойчивости
,
мощности
ИРМ
Централизованная
ИИ
-
автоматика
Параметры
P
,
Q
,
U
,
Q
ирм
,
L
index
Быстрый
оптимизационный
решатель
(
МП
-
алгоритм
)
Да
Нет
Предобученный
ускоритель
решений
(
машинное
обучение
)
Оптимальные
инъекции
Q
t
>
t
крит
Виртуальная
станция
ИРМ
Оптимальная
корректировка
уставок
ИРМ
U
1
Q
1
Q
имр
1
Q
имр
2
Q
имр
3
Q
имр
m
Q
имр
i
P
1
P
2
P
3
P
i
Q
3
Q
m
P
m
Q
i
Q
2
U
2
U
3
U
i
U
m
51
в
ЭЭС
,
t
кр
—
критическое
время
,
определяемое
тре
-
бованиями
режимного
и
противоаварийного
управ
-
ления
.
В
случае
нарушения
условия
(9),
например
,
для
схем
ЭЭС
большой
размерности
с
большим
количе
-
ством
установленных
регулируемых
СКРМ
,
предла
-
гается
использовать
предобученный
ускоритель
ре
-
шений
на
основе
модели
машинного
обучения
,
когда
задача
оптимизации
трансформируется
в
задачу
множественной
многоцелевой
регрессии
,
целью
ко
-
торой
является
одновременное
предсказание
инъек
-
ций
реактивной
мощности
Q
1
, …,
Q
d
,
где
d
—
коли
-
чество
регулируемых
СКРМ
в
ЭЭС
.
В
общем
случае
такая
задача
сводится
к
обуче
-
нию
многоцелевой
регрессионной
модели
на
наборе
данных
S
= (
x
(1)
,
y
(1)
), …, (
x
(
N
)
,
y
(
N
)
),
вычисленном
с
по
-
мощью
некой
функции
h
,
которая
присваивает
векто
-
рам
x
и
y
d
-
целевые
значения
для
каждого
экземпля
-
ра
.
Тогда
математически
это
может
быть
записано
следующим
образом
:
h
:
x
1
…
x
m
=
y
1
…
y
d
,
x
= (
x
1
,
…
,
x
m
)
→
y
= (
y
1
,
…
,
y
d
),
(10)
где
xi
и
yi
—
пространство
образцов
для
каждого
предиктора
x
i
(
i
1,
…
,
m
)
и
каждой
целевой
пере
-
менной
y
i
(
i
1,
…
,
d
)
соответственно
.
При
этом
под
предикторами
x
i
здесь
понимаются
расчетные
ло
-
кальные
L
-
индексы
L
j
в
соответствии
с
(1),
а
под
вы
-
ходами
y
i
—
предсказанные
значения
инъекций
реак
-
тивной
мощности
Q
i
.
Под
функциями
h
здесь
могут
пониматься
как
модель
квазидинамики
ЭЭС
,
которая
позволяет
получать
последовательность
установив
-
шихся
режимов
с
различными
расчетными
параме
-
трами
режима
,
так
и
некий
накопленный
архив
теле
-
измерений
.
Перепишем
уравнения
(10)
более
компактно
как
векторно
-
матричное
произведение
1
m
,
обозначив
переменные
x
i
и
y
i
в
постановке
задачи
регулирова
-
ния
СКРМ
:
L
∙
i
T
W
=
[
L
∙
i
T
w
1
,
L
∙
i
T
w
2
,
…
,
L
∙
i
T
w
m
]
, (11)
и
тогда
весь
набор
линейных
зависимостей
можно
также
записать
как
:
L
∙
i
T
W
Q
j
,
i
= 1, …,
d
,
j
= 1, …,
m
. (12)
Приближение
в
(12)
верно
только
в
том
слу
-
чае
,
если
можно
правильно
настроить
весовые
коэффициенты
модели
регрессии
W
.
Для
этого
может
быть
использована
любая
функция
стоимо
-
сти
регрессии
при
решении
задачи
минимизации
,
чтобы
это
приближение
выполнялось
как
можно
лучше
.
В
данном
исследовании
в
качестве
решения
(12)
предлагается
использовать
алгоритм
градиентно
-
го
бустинга
CatBoost,
разработанный
компанией
Яндекс
[23].
Алгоритм
CatBoost
использует
ориги
-
нальную
схему
градиентного
бустинга
,
основанную
на
построении
симметричных
деревьев
решений
(«
деревья
забвения
»).
В
результате
чего
алгоритм
CatBoost
реализует
меньшее
количество
параме
-
тров
и
обеспечивает
более
высокую
точность
,
в
том
числе
в
случае
сложных
нелинейных
зависимостей
.
Кроме
того
,
такие
деревья
сбалансированы
,
менее
подвержены
переобучению
и
позволяют
значитель
-
но
ускорить
предсказание
во
время
тестирования
.
Применительно
к
задаче
предсказания
инъекций
реактивной
мощности
Q
i
алгоритм
градиентного
бус
-
тинга
может
быть
записан
как
:
∆
Q
i
=
∆
Q
i
+
∙
(
Q
i
–
∆
Q
i
)
2
/
Q
i
, (13)
где
—
скорость
обучения
;
∆
Q
i
и
Q
i
—
предска
-
занные
и
целевые
значения
оптимальных
значений
инъекций
мощности
для
СКРМ
.
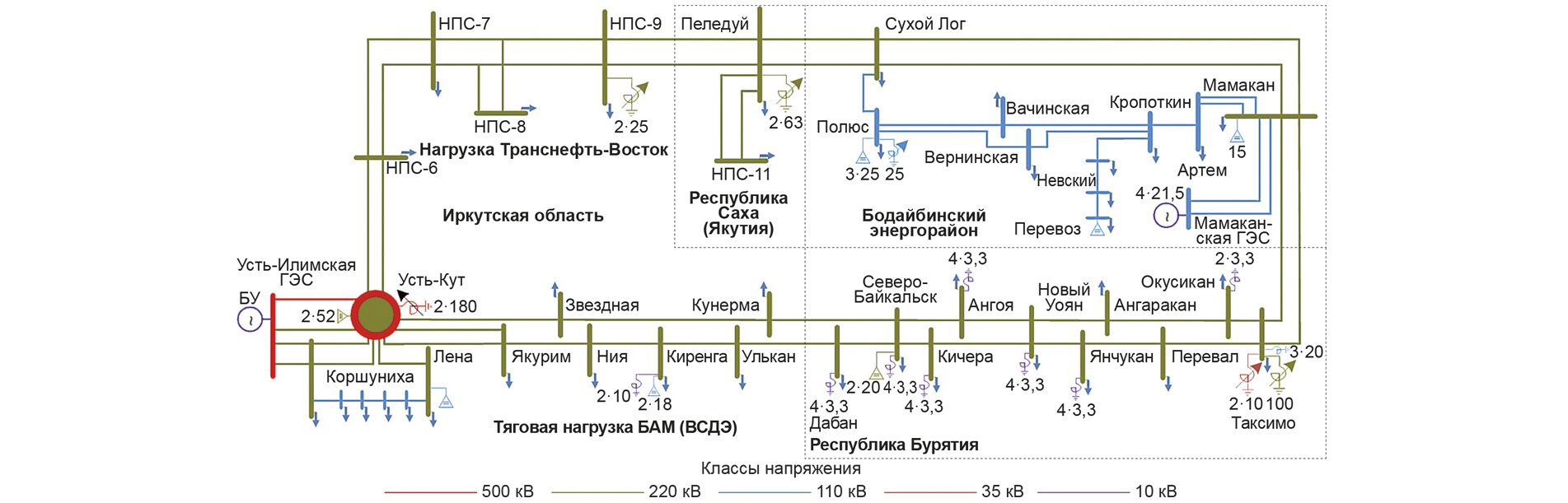
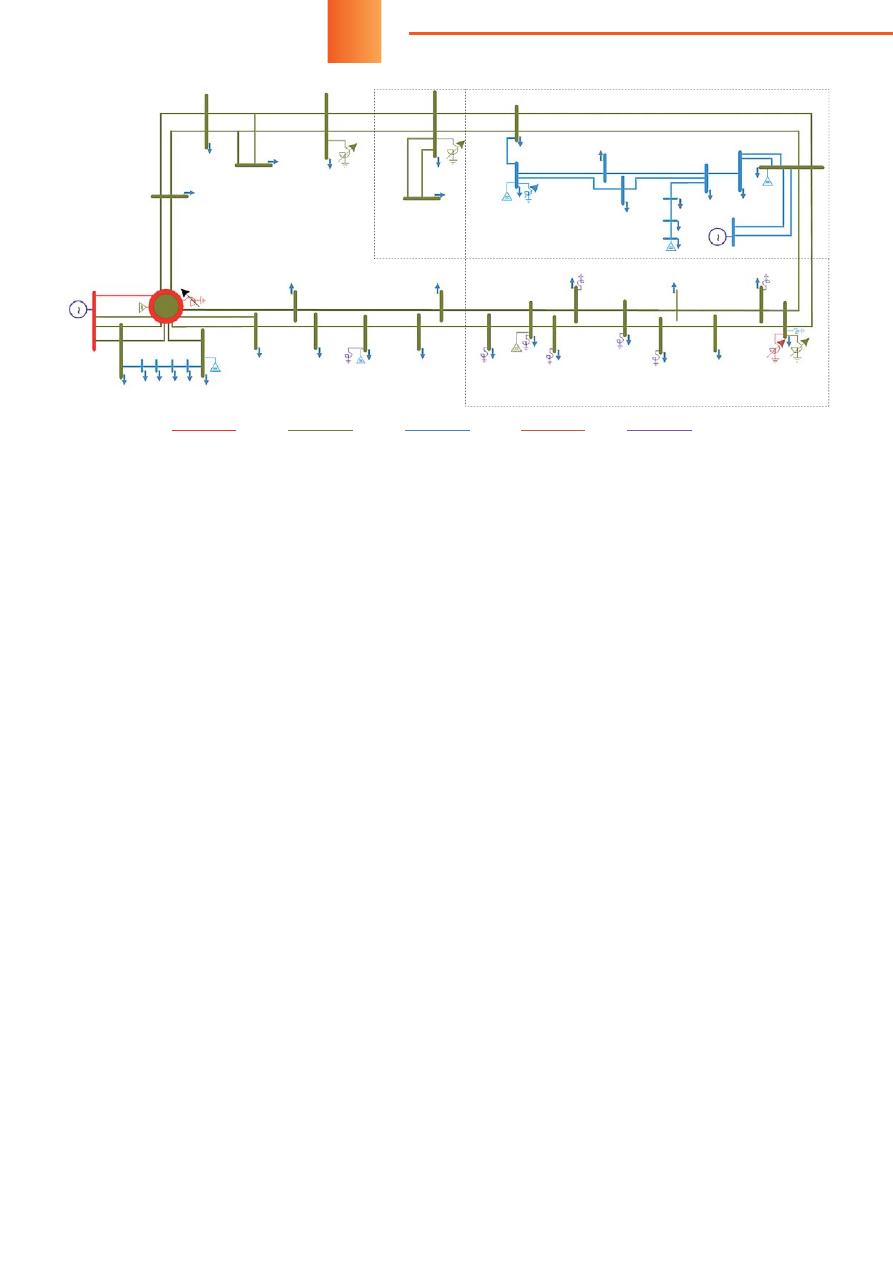
ЭКСПЕРИМЕНТАЛЬНЫЕ
РАСЧЕТЫ
Описание
схемы
.
Примером
для
эксперименталь
-
ного
исследования
выбрана
схема
Бодайбинского
энергетического
кольца
(
БЭК
)
северной
части
энер
-
госистемы
Иркутской
области
(
рисунок
6).
От
БЭК
220
кВ
,
которое
образуют
узловые
под
-
станции
(
ПС
)
Усть
-
Кут
,
Пеледуй
и
Мамакан
,
связан
-
ные
двухцепным
транзитом
ВЛ
220
кВ
,
осуществля
-
ется
электроснабжение
потребителей
электрической
энергии
в
ряде
районов
Иркутской
области
,
Забай
-
кальского
края
,
республик
Бурятия
и
Саха
(
Якутия
).
Центрами
питания
для
БЭК
являются
ПС
500
кВ
«
Усть
-
Кут
»
и
«
Мамаканская
ГЭС
».
На
территории
БЭК
расположены
объекты
ООО
«
Транснефть
-
Восток
»,
АО
«
Витимэнерго
»,
филиала
ПАО
«
ФСК
ЕЭС
» —
За
-
байкальское
ПМЭС
и
других
,
а
также
большинство
энергообъектов
принадлежит
ОАО
«
РЖД
».
Макси
-
мальное
потребление
энергорайона
в
период
зимних
максимальных
нагрузок
составляет
около
500
МВт
.
Баланс
электрической
мощности
БЭК
складывается
с
существенным
собственным
дефицитом
активной
мощности
.
При
максимуме
потребления
мощности
Расчет
расстояния
между
пламенем
и
мотыльками
в
пространстве
решений
Обновление
положения
каждого
мотылька
относительно
пламени
Выбор
наилучшего
решения
Конец
Расчет
значения
фитнес
-
функции
для
каждого
агента
Проверка
достижения
условия
завершения
алгоритма
Нет
Да
Начало
Сортировка
агентов
по
значению
фитнес
-
функции
(7)
Расчет
значения
фитнес
-
функции
(7)
для
начального
положения
агента
Начальные
варианты
инъекций
мощности
для
ИРМ
(
поисковые
агенты
)
Рис
. 5.
Блок
-
схема
алгоритма
ММП
для
задачи
расчета
оптимальных
уставок
СКРМ
№
2 (77) 2023
52
ЭНЕРГОСНАБЖЕНИЕ
Усть
-
Илимская
ГЭС
БУ
Классы
напряжения
500
кВ
220
кВ
110
кВ
35
кВ
10
кВ
НПС
-9
НПС
-7
НПС
-8
НПС
-6
НПС
-11
Пеледуй
Сухой
Лог
Нагрузка
Транснефть
-
Восток
Иркутская
область
Республика
Саха
(
Якутия
)
Бодайбинский
энергорайон
Перевоз
Полюс
2
·
25
2
·
63
4
·
21,5
2
·
3,3
3
·
20
2
·
10
4
·
3,3
4
·
3,3
4
·
3,3
4
·
3,3
2
·
18
2
·
10
2
·
20 4
·
3,3
100
4
·
3,3
2
·
52
2
·
180
Усть
-
Кут
15
3
·
25 25
Вернинская
Вачинская
Невский
Кропоткин
Мамакан
Артем
Мамакан
-
ская
ГЭС
Звездная
Кунерма
Ангоя
Ангаракан
Окусикан
Новый
Уоян
Северо
-
Байкальск
Коршуниха
Лена
Якурим
Киренга Улькан
Кичера
Янчукан Перевал
Таксимо
Дабан
Тяговая
нагрузка
БАМ
(
ВСДЭ
)
Республика
Бурятия
Ния
БЭК
в
зимний
период
2019
года
(414
МВт
)
распола
-
гаемая
мощность
единственной
электростанции
—
Мамаканской
ГЭС
составляет
порядка
10
МВт
(
при
установленной
мощности
станции
— 86
МВт
)
в
связи
с
малой
приточностью
в
водохранилище
в
указан
-
ный
период
,
а
возникающий
дефицит
покрывается
за
счет
перетоков
по
питающим
ВЛ
500–220
кВ
.
Развитие
существующих
золотодобывающих
предприятий
и
освоение
новых
перспективных
ме
-
сторождений
на
территории
Иркутской
области
,
в
том
числе
крупных
месторождений
золотосодержа
-
щих
руд
,
существенно
увеличат
спрос
на
электриче
-
скую
энергию
в
БЭК
.
Значимое
увеличение
потреб
-
ности
в
электроэнергии
будет
связано
с
реализацией
проектов
по
реконструкции
инфраструктуры
и
рас
-
ширению
,
в
том
числе
на
территории
Иркутской
об
-
ласти
,
Байкало
-
Амурской
железнодорожной
маги
-
страли
,
а
также
со
строительством
таких
крупных
заводов
,
как
ООО
«
Иркутская
нефтяная
компания
»,
Иркутский
завод
полимеров
и
завод
неорганической
химии
,
а
также
освоением
Ковыктинского
месторож
-
дения
ПАО
«
Газпром
».
Описание
проблемы
.
Учитывая
,
что
потребле
-
ние
БЭК
(
около
500
МВт
в
утяжеленных
режимах
)
бу
-
дет
только
расти
,
очевидно
,
что
наиболее
тяжелые
послеаварийные
режимы
возникают
при
разрыве
кольцевой
схемы
на
двухцепном
участке
,
когда
боль
-
шая
часть
нагрузки
остается
запитана
в
«
тупиковом
»
режиме
работы
.
Таким
образом
,
электроснабжение
практически
всей
нагрузки
БЭК
будет
осуществлять
-
ся
по
протяженному
транзиту
из
двух
ВЛ
220
кВ
.
В
таких
режимах
напряжение
на
шинах
подстанций
220
кВ
может
снижаться
ниже
аварийно
допустимых
значений
,
что
может
привести
к
нарушению
устойчи
-
вости
по
напряжению
.
Очевидно
,
что
в
данном
слу
-
чае
проблема
устойчивости
по
напряжению
для
БЭК
по
-
прежнему
актуальна
[3].
С
целью
управления
напряжением
на
кольце
установлены
СКРМ
,
однако
отсутствует
их
автомати
-
ческая
координация
,
что
усложняет
процесс
регули
-
рования
.
Выдача
диспетчерских
команд
оперативно
-
му
персоналу
энергообъектов
в
нормальном
режиме
является
эффективным
решением
при
медленных
изменениях
режима
.
В
аварийных
режимах
в
работу
вступает
АОСН
,
но
она
не
всегда
является
эффек
-
тивной
,
так
как
не
обладает
достаточной
гибкостью
и
адаптивностью
выдачи
УВ
,
что
в
ряде
случаев
при
-
водит
к
их
избыточности
и
,
как
следствие
,
к
превы
-
шению
наибольших
рабочих
значений
напряжения
.
Сценарии
испытаний
схемы
.
При
исследова
-
нии
эффективности
МПА
и
ВЭ
-
СКРМ
для
предотвра
-
щения
неустойчивости
по
напряжению
схемы
были
рассмотрены
следующие
варианты
моделирования
схемы
:
–
без
реализации
централизованной
автоматики
ЛАПНУ
—
в
этом
случае
в
рассматриваемой
под
-
системе
функционируют
локальные
непрерывные
(
АРВ
,
ОП
,
УШР
)
и
дискретные
(
РПН
,
АОСН
)
регу
-
ляторы
,
действия
которых
не
координируются
;
–
с
реализацией
МПА
в
подсистеме
—
в
такой
под
-
системе
также
присутствуют
локальные
(
непре
-
рывные
и
дискретные
)
регуляторы
,
однако
их
действия
координируются
МПА
;
–
с
реализацией
ВЭ
-
СКРМ
для
координированного
дискретного
управления
СКРМ
,
имеющихся
в
сис
-
теме
.
При
моделировании
не
учитывалась
автоматика
АОСН
.
Несмотря
на
то
,
что
данная
автоматика
явля
-
ется
эффективным
средством
борьбы
с
лавиной
на
-
пряжения
,
она
не
лишена
недостатков
,
к
основным
из
которых
можно
отнести
отсутствие
интеллекту
-
ального
уровня
и
координации
и
наличие
существен
-
ных
выдержек
времени
.
АОСН
реализует
УВ
исходя
из
локальной
информации
о
параметрах
режима
.
В
отличие
от
АОСН
,
МПА
выполняет
отключение
на
-
грузки
лишь
в
том
случае
,
если
это
действительно
необходимо
(
при
отсутствии
резервов
реактивной
мощности
в
подсистеме
).
При
этом
дополнительное
использование
ВЭ
-
СКРМ
для
координированного
управления
СКРМ
позволяет
нивелировать
недо
-
Рис
. 6.
Схема
БЭК
северной
части
энергосистемы
Иркутской
области
53
статки
их
локальных
регуляторов
.
Безусловно
,
даже
в
случае
реали
-
зации
моделей
МПА
и
ИА
-
СКРМ
отказ
от
АОСН
недопустим
.
Для
демонстрации
свойств
предложенных
моделей
ИАРН
,
были
рассмотрены
следующие
ситуации
возмущений
схемы
БЭК
,
которые
могут
приводить
к
потере
устойчивости
и
возникновения
ла
-
вины
напряжения
:
–
базовый
сценарий
с
последо
-
вательными
и
/
или
стохастиче
-
скими
утяжелениями
электро
-
потребления
по
всей
схеме
(
сценарий
1);
–
разрыв
кольца
между
НПС
-7
и
НПС
-8-
НПС
-9
при
утяжеле
-
нии
схемы
(
сценарий
2).
В
качестве
расчетного
модуля
для
выполнения
экспериментов
на
расчетной
модели
использован
расчетный
блок
PSAT/Matlab.
Это
среда
с
открытым
кодом
для
функционирования
на
платформах
Matlab
и
GNU/Octave,
которая
включает
в
себя
достаточный
набор
возможностей
исследования
электрических
режимов
ЭЭС
.
Алгоритм
эмпирической
оптимизации
ММП
был
также
реализован
в
Matlab.
Модели
гради
-
ентного
бустинга
CatBoost
и
множественной
регрес
-
сии
реализованы
в
среде
Python
с
использованием
открытых
библиотек
sklearn
и
catboost.
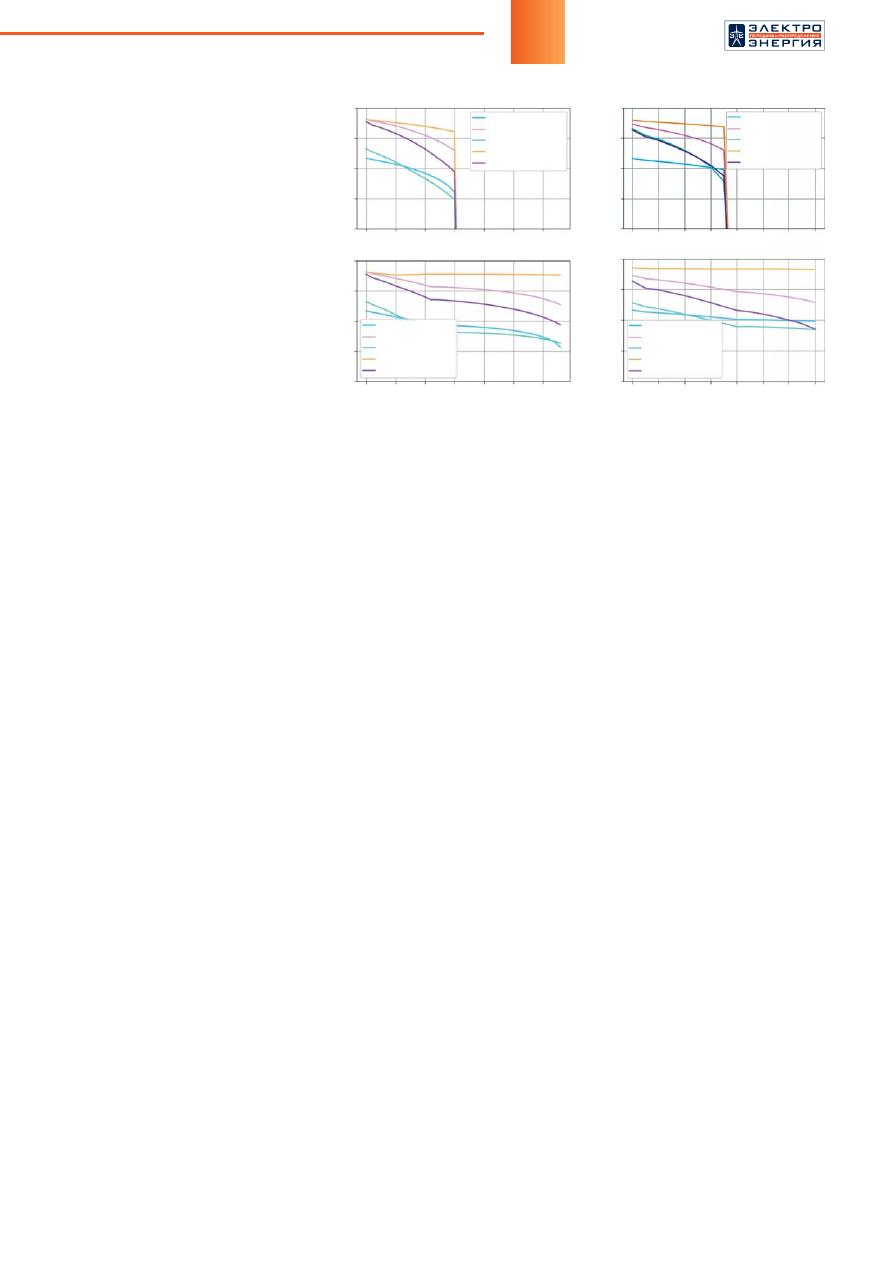
1.
Испытания
МПА
.
Графики
изменения
напряже
-
ний
отдельных
узлов
в
системе
БЭК
при
утяжелении
режима
для
рассматриваемых
ситуаций
(
сценарии
1
и
2)
приведены
на
рисунке
7.
Для
рассмотренных
случаев
МПА
показала
лучший
результат
.
Для
сце
-
нария
1
при
использовании
МПА
количество
шагов
утяжеления
до
предела
по
статической
устойчивости
(
N
max
)
равно
35,
при
использовании
ОП
АРВ
N
max
=15
(
рисунок
7
а
).
Для
более
«
тяжелого
»
сценария
2
с
раз
-
рывом
кольца
система
,
в
целом
,
быстрее
достигает
предела
по
статической
устойчивости
(
рисунок
7
б
).
Даже
при
использовании
МПА
количество
шагов
утяжеления
сокращается
примерно
вдвое
(
N
max
=14).
Однако
это
все
равно
в
2
раза
больше
,
чем
при
мо
-
делировании
ОП
АРВ
(
N
max
=7).
Необходимо
отметить
,
что
при
использовании
МПА
напряжения
в
системе
будут
автоматически
ограничиваться
локальными
целями
агентов
гене
-
рации
.
При
достижении
некоторого
критического
значения
напряжения
локальная
цель
(
поддержание
параметров
работы
в
допустимых
эксплуатационных
пределах
)
начнет
превалировать
над
глобальной
(
предотвращение
лавины
напряжения
).
Условием
возникновения
перегрузки
генератора
является
уве
-
личение
текущей
генерации
реактивной
мощности
свыше
максимального
значения
.
Однако
для
МПА
вероятность
каскадного
отклю
-
чения
будет
ниже
,
так
как
за
счет
перераспреде
-
ления
реактивной
мощности
загрузка
генераторов
будет
осуществляться
более
равномерно
по
срав
-
нению
с
ситуацией
,
когда
автоматика
вообще
от
-
сутствует
.
Наличие
ОП
АРВ
существенно
снижает
предел
по
статической
устойчивости
.
При
этом
если
быстродействие
ОП
АРВ
в
какой
-
то
момент
оказы
-
вается
ниже
скорости
набора
нагрузки
в
системе
,
то
некоторые
генераторы
существенно
перегружаются
.
По
понятным
причинам
излишнее
повышение
бы
-
стродействия
ОП
АРВ
недопустимо
.
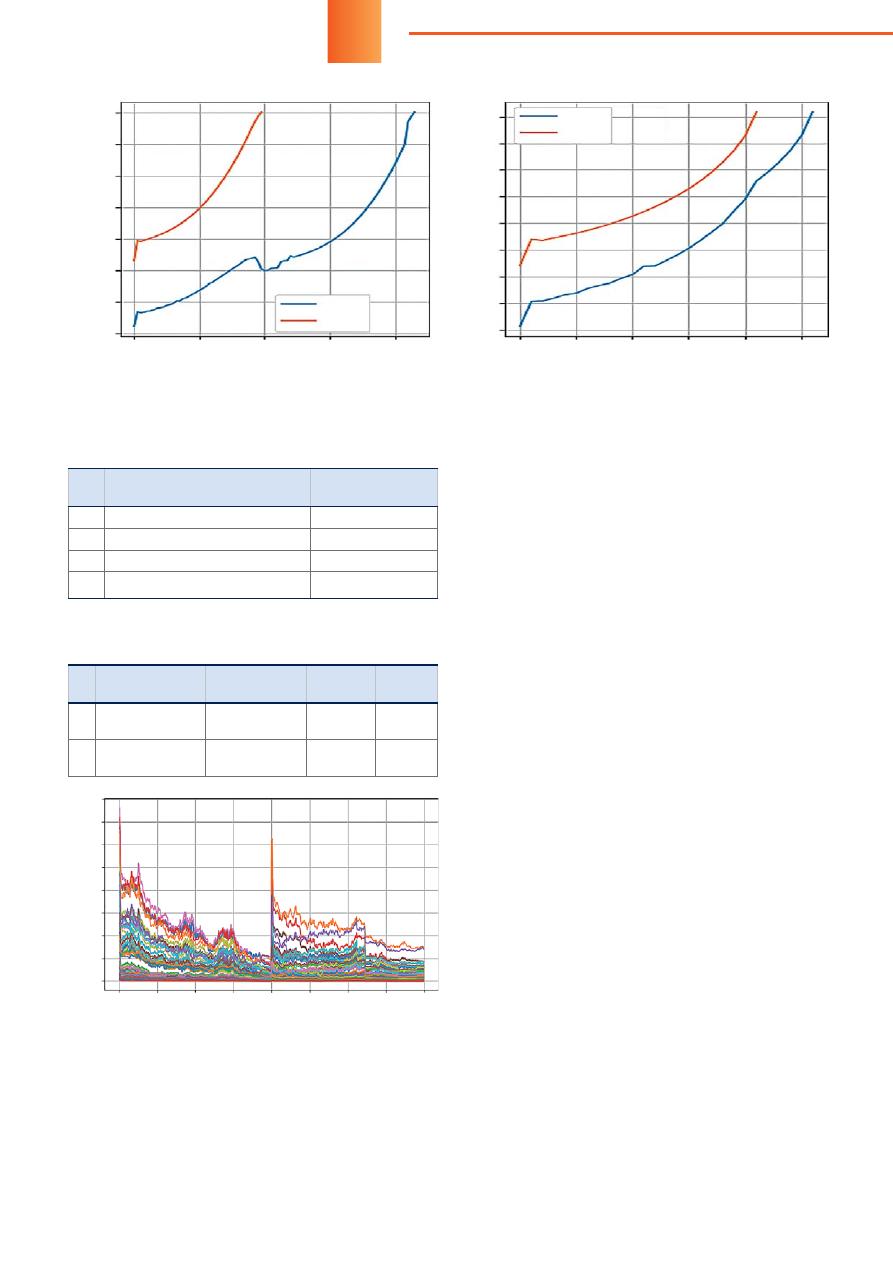
2.
Испытания
ВЭ
-
СКРМ
.
При
испытаниях
МПА
при
утяжелении
режима
не
учитывалось
наличие
дискретных
устройств
реактивной
мощности
(
БСК
,
ШР
)
в
схеме
БЭК
(
рисунок
6),
которые
коммутиру
-
ются
при
снижении
напряжения
.
Поэтому
на
втором
этапе
испытаний
помимо
МПА
,
в
циклы
моделирова
-
ния
вводилась
ВЭ
-
СКРМ
для
регулирования
таких
дискретных
устройств
,
которая
реализовывала
ско
-
ординированное
управление
ШР
и
БСК
в
схеме
БЭК
в
рамках
задачи
вторичного
регулирования
напряже
-
ния
.
Суммарный
объем
доступных
СКРМ
представ
-
лял
собой
условную
агрегацию
реактивной
мощно
-
сти
в
рамках
модели
ВЭ
,
управление
которой
было
возложено
на
ВЭ
-
СКРМ
.
При
этом
наиболее
информативным
показателем
эффективности
ВЭ
-
СКРМ
являются
не
профили
на
-
пряжения
,
а
изменение
значений
показателя
L
sum
как
целевой
функции
оптимизации
(
рисунок
8).
Как
видно
из
рисунка
8,
в
обоих
рассмотренных
сцена
-
риях
интеллектуальное
координирование
дискрет
-
ных
регуляторов
реактивной
мощности
позволяет
дополнительно
«
отодвинуть
»
предел
по
статической
устойчивости
.
Если
для
первого
сценария
МПА
обес
-
печивала
N
max
=35,
то
при
использовании
ВЭ
-
СКРМ
оно
значимо
увеличивается
до
N
max
=87 (
рисунок
8
а
).
В
сценарии
обрыва
кольца
ВЭ
-
СКРМ
дает
уже
более
скромный
эффект
повышения
предела
устойчиво
-
сти
:
с
N
max
=23
до
N
max
=28 (
рисунок
8
б
).
Важным
аспектом
испытаний
является
также
оценка
быстродействия
модели
ВЭ
-
СКРМ
.
Для
это
-
го
время
нахождения
оптимальных
уставок
СКРМ
для
одного
установившегося
режима
сравнивалось
с
другими
алгоритмами
эвристической
(
рой
частиц
,
Рис
. 7.
Результаты
квазидинамического
моделирования
на
схеме
БЭК
для
двух
сценариев
при
использовании
ОП
АРВ
(
верхние
графики
)
и
МПА
(
нижние
графики
):
а
)
сценарий
1;
б
)
сценарий
2
Напр
яжение
,
о
.
е
.
Напр
яжение
,
о
.
е
.
1,1
1,0
0,9
0,8
0,7
1,1
1,0
0,9
0,8
0,7
0 5 10 15 20 25 30
0 5 10 15 20 25 30
0 2 4 6 8 10 12 14
0 2 4 6 8 10 12 14
Усть
-
Кут
Северобайкальск
Киренга
НПС
-6
Кичера
Усть
-
Кут
Северобайкальск
Киренга
НПС
-6
Кичера
Усть
-
Кут
Северобайкальск
Киренга
НПС
-6
Кичера
Усть
-
Кут
Северобайкальск
Киренга
НПС
-6
Кичера
Напр
яжение
,
о
.
е
.
Напр
яжение
,
о
.
е
.
1,1
1,0
0,9
0,8
0,7
1,1
1,0
0,9
0,8
0,7
Шаг
утяжеления
Шаг
утяжеления
Шаг
утяжеления
Шаг
утяжеления
а
)
б
)
№
2 (77) 2023
54
ЭНЕРГОСНАБЖЕНИЕ
а
)
б
)
модель
ВЭ
-
СКРМ
предусматривает
трансформацию
оптимизационной
постановки
в
задачу
восстанов
-
ления
множественной
регрессии
и
использование
предварительно
обученной
модели
градиентного
бустинга
CatBoost
для
предсказания
уставок
СКРМ
.
В
этом
случае
мы
фактически
имеем
приближенное
,
но
крайне
быстрое
решение
задачи
ПАУ
.
Точность
такого
решения
можно
оценить
с
помощью
тесто
-
вой
ошибки
предсказания
CatBoost,
то
есть
точности
расчета
уставок
СКРМ
.
В
данном
примере
модель
CatBoost
обучалась
на
выборке
800
режимов
схемы
БЭС
,
полученных
в
результате
процедуры
стохастического
утяжеления
схемы
.
Этот
массив
данных
был
разделен
на
обу
-
чаемую
(85%)
и
тестовую
(15%)
выборки
.
На
вход
модели
подавались
расчетные
значения
локальных
L
-
индексов
как
интегральной
характеристики
режи
-
ма
(
рисунок
9),
на
выходе
были
оптимальные
устав
-
ки
доступных
СКРМ
,
предварительно
рассчитан
-
ные
алгоритмом
ММП
в
результате
моделирования
офлайн
.
На
рисунке
10
показана
эффективность
рассчи
-
танных
уставок
в
результате
стохастического
утяже
-
ления
,
что
обеспечивает
разнообразность
схемно
-
режимных
ситуаций
для
обучения
модели
CatBoost.
Общая
ошибка
обучения
составила
минимальные
0,01%.
Результаты
тестирования
модели
CatBoost
для
предсказания
уставок
некоторых
устройств
СКРМ
представлены
в
таблице
2
и
рисунке
11.
Низ
-
кая
среднеквадратичная
ошибка
RMSE
свидетель
-
ствует
о
том
,
что
обученная
модель
хорошо
попадает
в
пики
,
как
например
в
случае
предсказания
уставки
для
УШР
Усть
-
Кут
при
режиме
77 (
рисунок
11).
Коэф
-
фициент
детерминации
R2
для
всех
случаев
аппрок
-
симации
уставок
СКРМ
близок
к
1 (
таб
лица
2),
что
означает
соответствие
модели
реальным
данным
,
то
есть
ее
адекватности
в
восстановленной
множе
-
ственной
регрессии
.
Таким
образом
результаты
проведенных
испыта
-
ний
указывают
на
высокое
качество
вторичного
ре
-
гулирования
реактивной
мощности
на
примере
схе
-
мы
БЭК
с
использованием
разработанных
моделей
ИАРМ
.
Су
мма
л
ок
альных
L
-
индек
со
в
26
24
22
20
18
16
14
12
б
)
Шаг
утяжеления
Шаг
утяжеления
L
sum_corr
L
sum_corr
L
sum
L
sum
0 20 40 60 80
0 5 10 15 20 25
Су
мма
л
ок
альных
L
-
индек
со
в
Рис
. 8.
Изменение
суммы
локальных
L
-
индексов
,
L
sum
без
регулирования
и
с
регулированием
СКРМ
для
различных
сценариев
:
а
)
сценарий
1;
б
)
сценарий
2
Табл
. 1.
Сравнение
методов
по
скорости
сходимости
решения
№
Метод
оптимизации
Время
итерации
,
с
1
Мотылек
и
пламя
5,26
2
Рой
частиц
236,7
3
Имитация
отжига
353,7
4
Ньютон
-
Рафсон
1352,89
Рис
. 9.
Входная
выборка
для
модели
CatBoost,
включа
-
ющая
значения
локальных
L
-
индексов
всех
нагрузочных
узлов
схемы
БЭК
для
различных
800
режимов
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0,0
0 100 200 300 400 500 600 700 800
Лок
альные
L
-
индек
сы
Режим
ЭЭС
Табл
. 2.
Пример
результатов
тестирования
модели
CatBoost
для
предсказания
уставок
некоторых
устройств
СКРМ
№
Узел
Обозначение
Ошибка
RMSE, %
R-score
1
УШР
ПС
500
кВ
«
Усть
-
Кут
»
delta
Q
1
1,56
91,59
2
БСК
ПС
110
кВ
«
Лена
»
delta
Q
5
3,04
96,70
16
15
14
13
12
11
10
9
8
имитация
отжига
)
и
традиционной
(
метод
Ньютона
-
Рафсона
)
оптимизации
.
Как
видно
из
таблицы
1,
ал
-
горитм
ММП
,
используемый
в
ВЭ
-
СКРМ
,
показывает
наилучшие
результаты
.
В
случае
повышения
размерности
решаемой
за
-
дачи
(
например
,
при
большем
уровне
доступных
СКРМ
),
когда
условие
(9)
может
не
выполняться
,
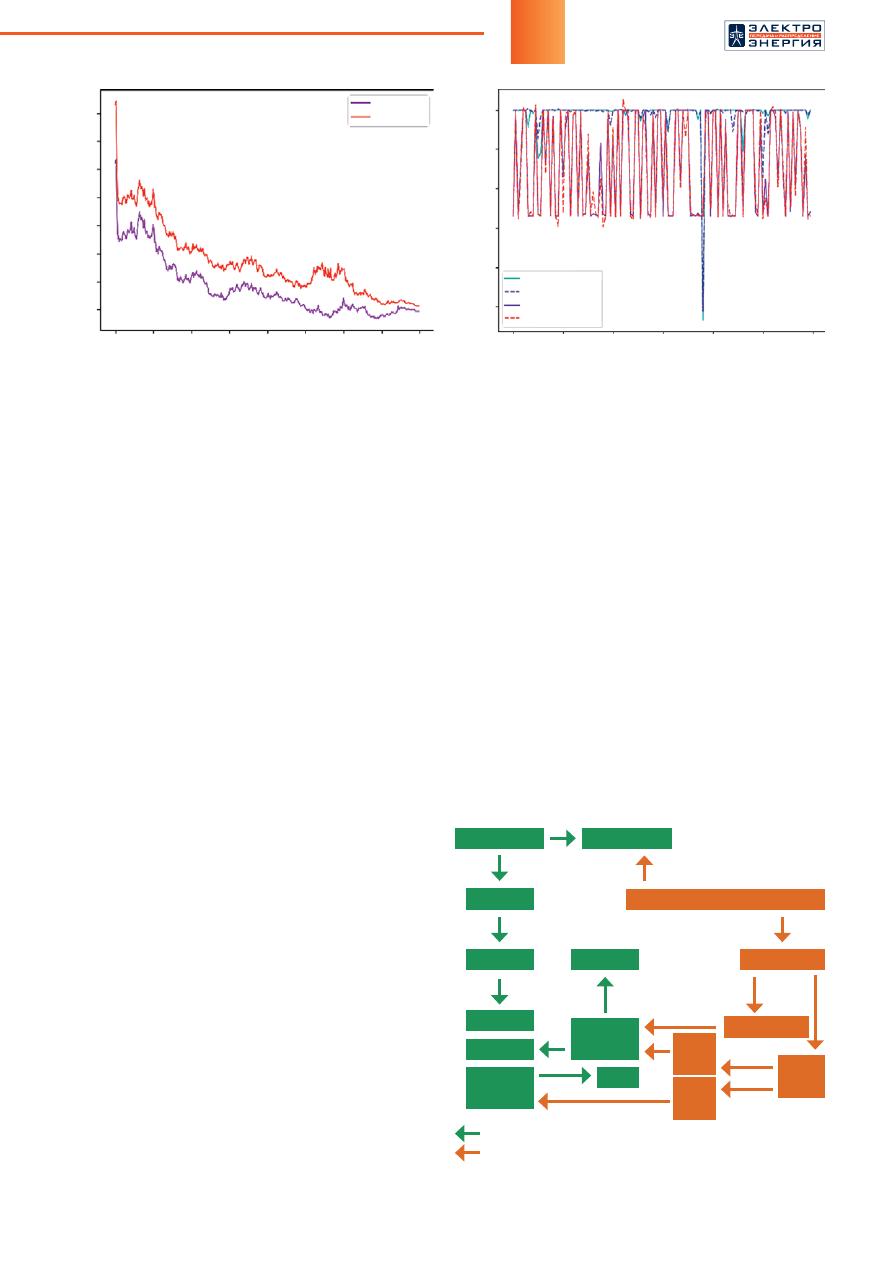
55
Шаг
стохастического
утяжеления
Шаг
стохастического
утяжеления
0 50 100 150 200 250 300 350 400
0
20
40
60
80
100 120
Су
мма
л
ок
альных
L
-
индек
со
в
У
ст
авк
а
СКР
М
Предложенная
МПА
обеспечивает
возможность
строгой
фиксации
момента
необходимости
пере
-
хода
от
задачи
вторичного
регулирования
к
задаче
противоаварийного
управления
,
исключая
тем
са
-
мым
человеческий
фактор
и
обеспечивая
непрерыв
-
ность
процессов
оперативного
и
автоматического
противоаварийного
управления
.
Реализация
скоор
-
динированного
управления
СКРМ
на
базе
ВЭ
-
СКРМ
позволяет
дополнительно
повысить
предел
по
ста
-
тистической
устойчивости
и
реализовать
эффектив
-
ное
регулирование
напряжения
при
различных
воз
-
мущениях
.
Применение
быстрых
решателей
на
базе
алгоритмов
эмпирической
оптимизации
и
машинного
обучения
позволяет
решить
проблему
большого
вре
-
мени
расчета
при
реализации
централизованного
управления
дискретными
СКРМ
.
ЗАКЛЮЧЕНИЕ
И
ПЕРСПЕКТИВА
ВНЕДРЕНИЯ
Так
как
интеллектуальные
автоматики
нового
поко
-
ления
должны
не
нарушать
,
а
дополнять
существу
-
ющую
структуру
ПАУ
ЕЭС
России
,
необходимо
рас
-
смотреть
возможность
ее
внедрения
с
сохранением
действующих
иерархических
принципов
построения
ПАУ
.
Это
важно
,
так
как
в
современных
больших
ЭЭС
,
расположенных
на
большой
территории
,
не
-
возможно
выполнить
ПАУ
на
базе
единого
центра
-
лизованного
комплекса
,
поскольку
для
этого
потре
-
буется
чрезвычайно
большое
число
протяженных
каналов
связи
и
вычислительных
мощностей
.
В
настоящий
момент
ПАУ
ЕЭС
России
организо
-
вано
по
типу
«
ДО
».
Очевидно
,
что
при
проведении
предварительных
расчетов
по
циклу
«II-
ДО
»
практи
-
чески
можно
учесть
лишь
некоторое
число
возмож
-
ных
схемно
-
режимных
ситуаций
,
что
существенно
снижает
адаптивность
комплекса
.
По
такому
прин
-
ципу
функционируют
все
существующие
локальные
автоматики
нарушения
устойчивости
АПНУ
(
ЛАПНУ
),
работающие
без
связи
с
централизованной
систе
-
мой
противоаварийного
управления
(
ЦСПА
).
ЛАПНУ
,
имеющие
связи
с
ЦСПА
,
работают
по
принципу
«I-
ДО
»,
который
основан
на
применении
математи
-
ческой
модели
в
составе
комплекса
противоаварий
-
ной
автоматики
,
с
помощью
которой
циклически
(
не
более
30
секунд
)
производится
расчет
дозировки
УВ
с
последующей
их
передачей
в
устройство
ав
-
томатического
запоминания
дозировки
(
АЗД
)
или
автоматической
дозировки
воздействий
(
АДВ
).
Вре
-
мя
расчета
дозировок
применительно
к
сохранению
краткосрочной
устойчивости
по
напряжению
в
пере
-
ходном
процессе
при
этом
остается
большим
.
Кроме
того
,
такая
автоматика
не
сможет
выдавать
коррект
-
ные
УВ
при
ненормативных
возмущениях
.
Таким
образом
,
принципиальным
шагом
к
реали
-
зации
ПАУ
нового
поколения
(
НП
)
является
переход
к
принципу
«
ПОСЛЕ
» (
рисунок
12).
При
использова
-
нии
этого
принципа
обработка
информации
для
вы
-
работки
УВ
начинается
только
после
того
,
как
посту
-
пили
сигналы
о
возмущениях
от
пусковых
органов
.
Поэтому
вычислительные
устройства
для
реализа
-
ции
данного
принципа
должны
иметь
очень
высокое
быстродействие
,
которое
могут
обеспечить
описан
-
ные
выше
интеллектуальные
системы
на
базе
искус
-
ственного
интеллекта
.
Рис
. 10.
Изменение
суммы
локальных
L
-
индексов
без
ре
-
гулирования
(
L
sum
)
и
регулированием
СКРМ
(
L
sum_corr
)
при
стохастическом
утяжелении
схемы
Рис
. 11.
Рассчитанные
(test)
и
предсказанные
моделью
CatBoost (pred)
уставки
СКРМ
для
тестовой
последова
-
тельности
установившихся
режимов
схемы
БЭК
Рис
. 12.
Модель
внедрения
ИАРН
в
структуру
ПАУ
ЕЭС
России
16
14
12
10
8
6
4
2
0,0
–0,2
–0,4
–0,6
–0,8
–1,0
L
sum_corr
L
sum
delta
Q
1-test
delta
Q
1-pred
delta
Q
5-test
delta
Q
5-pred
ЛАПНУ
(II-
ДО
)
ЦСПА
(I-
ДО
)
10%
U
пар
АПНУ
НП
(
ПОСЛЕ
)
ИАРН
ВЭ
-
СКРМ
МПА
АН
АГ
ТУВ
ОГ
ОН
СКРМ
АОСН
ФВ
АРВ
СГ
Реализованная
инфраструктура
Планируемая
реализация
№
2 (77) 2023
56
ЭНЕРГОСНАБЖЕНИЕ
В
итоге
,
предложенная
в
работе
ИАРН
представля
-
ется
частью
АПНУ
НП
(
рисунок
12),
реализация
кото
-
рой
будет
следующим
шагом
в
модернизации
ПАУ
ЕЭС
России
.
При
этом
существующие
комплексы
ПАУ
могут
быть
дополнены
интеллектуальными
средствами
с
со
-
хранением
их
автономной
работы
в
случае
нерабо
-
тоспособности
АПНУ
НП
.
Важно
отметить
,
что
ИАРН
в
рамках
работы
АПНУ
НП
будет
реализовывать
УВ
на
координацию
резервов
реактивной
мощности
и
изме
-
нение
состояния
СКРМ
для
повышения
устойчивости
,
что
отсутствует
в
существующих
принципах
ПАУ
.
Имеющуюся
инфраструктуру
построения
ПАУ
возможно
использовать
для
реализации
ИАРН
.
АОСН
в
рамках
ПАУ
НП
будет
являться
низовым
устройством
для
реализации
части
УВ
от
ВЭ
-
СКРМ
(
дискретное
регулирование
СКРМ
)
и
от
МПА
(
в
части
выполнения
процедуры
ОН
)
и
сохранять
свои
функ
-
ции
при
отказе
верхних
устройств
по
типу
ЛАПНУ
.
Работа
выполнена
в
рамках
государственного
зада
-
ния
FWEU-2021-0001 (
рег
.
№
АААА
-
А
21-121012190027-4)
фундаментальных
исследований
СО
РАН
,
а
также
гранта
Российского
научного
фонда
№
19-19-00673.
ЛИТЕРАТУРА
1.
Воропай
Н
.
И
.,
Курбацкий
В
.
Г
.,
То
-
мин
Н
.
В
.,
Панасецкий
Д
.
А
.,
Сидо
-
ров
Д
.
Н
.,
Жуков
А
.
В
.,
Ефимов
Д
.
Н
.,
Осак
А
.
Б
.,
Спиряев
В
.
А
.,
Домы
-
шев
А
.
В
.
Комплекс
интеллектуаль
-
ных
средств
для
предотвращения
крупных
аварий
в
энергосисте
-
мах
.
Новосибирск
: «
Наука
», 2016.
332
с
.
2.
Воропай
Н
.
И
.,
Томин
Н
.
В
.,
Си
-
доров
Д
.
Н
.,
Курбацкий
В
.
Г
.,
Па
-
насецкий
Д
.
А
.,
Жуков
А
.
В
.,
Ефи
-
мов
Д
.
Н
.,
Осак
А
.
Б
.
Комплекс
интеллектуальных
средств
ранне
-
го
выявления
и
предотвращения
возникновения
системных
аварий
в
энергообъединениях
//
Автома
-
тика
и
телемеханика
, 2018,
№
10.
С
. 6–25.
3.
Реуцкий
И
.
С
.,
Курбацкий
В
.
Г
.
Обоснование
необходимости
со
-
вершенствования
систем
проти
-
воаварийного
управления
для
предотвращения
нарушений
устой
-
чивости
по
напряжению
в
энерго
-
системах
// iPolytech Journal, 2022,
т
. 26,
№
2,
С
. 297–309. URL: https://
doi.org/10.21285/1814-3520-2022-
2-297-309.
4.
Архипов
И
.
Л
.,
Иванов
А
.
М
.,
Новиц
-
кий
Д
.
А
.,
Сорокин
Д
.
В
.,
Холкин
Д
.
В
.
Мультиагентная
система
управ
-
ления
напряжением
и
реактивной
мощностью
/
Сб
. 22-
й
конферен
-
ции
«
Релейная
защита
и
автома
-
тика
энергосистем
».
Москва
, 2014.
5.
Панасецкий
Д
.
А
.
Совершенствова
-
ние
структуры
и
алгоритмов
про
-
тивоаварийного
управления
ЭЭС
для
предотвращения
лавины
на
-
пряжения
и
каскадного
отключе
-
ния
линий
:
дис
. ...
канд
.
техн
.
наук
:
05.14.02.
Иркутск
:
ИСЭМ
СО
РАН
,
2015, 192 c.
6.
Фишов
А
.
Г
.,
Карджаубаев
Н
.
А
.
Де
-
централизованное
мультиагент
-
ное
регулирование
напряжения
в
электрических
сетях
//
Вестник
Иркутского
государственного
тех
-
нического
университета
, 2018,
т
. 22,
№
6.
С
. 183–195.
7. Hu D., Ye Zh., Gao Y., Ye Z., Peng Y.,
Yu N. Multi-agent Deep Reinforce-
ment Learning for Voltage Control
with Coordinated Active and Re-
active Power Optimization. IEEE
Transactions on Smart Grid, 2022,
vol. 3, iss. 6. URL: https://ieeexplore.
ieee.org/document/9805763.
8.
Домышев
А
.
В
.
Стохастический
метод
для
оптимального
управле
-
ния
нормальными
электрическими
режимами
энергосистем
//
Энерге
-
тик
, 2021,
№
1.
С
. 11–14.
9. Huang Q., Huang R., Hao W., Tan J.,
Fan R., Huang Z. Adaptive Power
System Emergency Control Using
Deep Reinforcement Learning. IEEE
Transactions on Smart Grid, vol. 11,
no. 2, pp. 1171-1182. URL: https://
ieeexplore.ieee.org/document/
8787888.
10.
Antoniadou-Plytaria K.E., Kouveli-
otis-Lysikatos I.N., Georgilakis P.S.,
Hatziargyriou N.D. Distributed and
Decentralized Voltage Control of
Smart Distribution Networks: Mod-
els, Methods, and Future Research.
IEEE Transactions on Smart Grid,
vol. 8, no. 6, pp. 2999-3008. URL:
https://ieeexplore.ieee.org/docu-
ment/7874216.
11. Tomin N.V., Kurbatsky V.G., Re-
utsky I.S. Hybrid intelligent tech-
nique for voltage / VAR control in
power systems // IET Generation,
Transmission and Distribution, 2019,
vol. 13, no. 20, pp .4724-4732.
12.
Кошур
В
.
Д
.,
Рыжикова
Е
.
О
.
Ро
-
евой
интеллект
,
нечеткий
логи
-
ческий
вывод
и
мультиагентные
технологии
в
методе
глобальной
оптимизации
/
Сб
.
научных
трудов
XV
Всероссийской
научно
-
техни
-
ческой
конференции
«
Нейроин
-
форматика
-2013».
Часть
. 2.
М
.:
НИЯУ
МИФИ
, 2013.
С
. 12–21.
13.
Гуревич
Ю
.
Е
.,
Либова
Л
.
Е
.,
Окин
А
.
А
.
Расчеты
устойчивости
и
противо
-
аварийной
автоматики
в
энерго
-
системах
.
М
.:
Энергоатомиздат
,
1990. 391
с
.
14.
Войтов
О
.
Н
.,
Воропай
Н
.
И
.,
Гамм
А
.
З
.,
Голуб
И
.
Н
.,
Ефимов
Д
.
Н
.
Анализ
не
-
однородностей
электроэнергети
-
ческих
систем
.
Новосибирск
:
Наука
,
1999. 256
с
.
15.
Task Force C4.602. Coordinated
voltage control in transmission net-
work. CIGRE. Technical report,
2007, 285 p.
16. Sanduleac M., Pons L., Fiorentino
G., Pop R., M. Albu. The unbundled
smart meter concept in a synchro-
SCADA framework. 2016 IEEE Inter-
national Instrumentation and Mea-
surement Technology Conference
Proceedings, 2016. URL: https://
ieeexplore.ieee.org/abstract/docu-
ment/7520459.
17.
Курейчик
В
.
В
.,
Запорожец
Д
.
Ю
.
Роевой
алгоритм
в
задачах
оп
-
тимизации
//
Известия
ЮФУ
.
Тех
-
нические
науки
, 2010,
№
7(108).
С
. 28–32.
18.
Карпенко
А
.
П
.
Современные
ал
-
горитмы
поисковой
оптимизации
.
Алгоритмы
,
вдохновленные
при
-
родой
.
М
.:
Издательство
МГТУ
им
.
Н
.
Э
.
Баумана
, 2014. 448
с
.
19. Kessel P., Glavitsch H. Estimating
the Voltage Stability of a Power
System. IEEE Transactions on
Power Delivery, 1986, vol. 1, no. 3,
pp. 346354. URL: https://ieeexplore.
ieee.org/document/4308013.
20. Jiang T., Li G., Jia H., Chen H.,
Miao W. Simplied L-index and its sen-
sitivity analysis method for on-line
monitoring of voltage stability control.
Dianli Xitong Zidonghua (Automation
of Electric Power Systems), 2012,
vol. 36, No. 21. Pp. 1318. URL:
https://www.researchgate.net/publi-
cation/289615730.
21.
Хассан
Т
.
М
.
А
.
Развитие
методов
оптимизации
размещения
компен
-
сирующих
устройств
и
возобнов
-
ляемой
распределенной
генера
-
ции
в
радиальных
электрических
сетях
:
дис
. ...
канд
.
техн
.
наук
:
05.14.02.
М
.:
НИУ
МЭИ
, 2018.

57
22.
Yadykin I.B., Tomin N.V., Iska-
kov A.B., Galyaev I.A. Optimal adap-
tive control of electromechanical os-
cillations modes in power systems.
IFAC-PapersOnLine, 2022, vol. 55,
no. 9, pp. 134-139. URL: https://
www.sciencedirect.com/science/ar-
ticle/pii/S2405896322004098.
23.
Dorogush A.V., Ershov V., Gu-
lin A. CatBoost: gradient boost-
ing with categorical features
support. Workshop on ML Sys-
tems at NIPS 2017. URL: https://
www.researchgate.net/publication/
32857606.
REFERENCES
1. Voropay N.I., Kurbatskiy V.G., To-
min N.V., Panasetskiy D.A., Sido-
rov D.N., Zhukov A.V., E
fi
mov D.N.,
Osak A.B., Spiryaev V.A., Domyshev
A.V. A set of intelligent means for
major accident prevention in power
systems. Novosibirsk, Nauka Publ.,
2016. 332 p. (In Russian)
2. Voropay N.I., Tomin N.V., Sido-
rov D.N., Kurbatskiy V.G., Panasets-
kiy D.A., Zhukov A.V., E
fi
mov D.N.,
Osak A.B. A set of intelligent means
for early detection and prevention of
system accidents in power grids //
Avtomatika i telemekhanika
[Auto-
mation and remote control], 2018,
no. 10, pp. 6-25. (In Russian)
3. Reutskiy I.S., Kurbatskiy V.G. Jus-
ti
fi
cation of anti-emergency control
system improvement to prevent volt-
age instability in power systems //
iPolytech Journal, 2022, vol. 26,
no. 2, pp. 297-309. URL: https://doi.
org/10.21285/1814-3520-2022-2-
297-309.
4. Arkhipov I.L., Ivanov A.M., Novit-
skiy D.A., Sorokin D.V., Kholkin D.V.
Multi-agent voltage and reactive
power control system /
Sbornik 22-oy
konferentsii "Releynaya zashchita
i avtomatika energosistem"
[Proc. of
22nd conference "Relay protection
and automation of power systems"].
Moscow, 2014.
5. Panasetskiy D.A. Improvement of
the structure and algorithms of UPS
anti-emergency control to prevent
voltage avalanche and cascade
tripping of lines: PhD thesis in Engi-
neering Science: 05.14.02. Irkutsk,
Melentiev Energy Systems Insti-
tute, Siberian Branch of the Russian
Academy of Sciences, 2015, 192 p.
(In Russian)
6. Fishov A.G., Kardzhaubaev N.A. De-
centralized multi-agent voltage regu-
lation in electrical networks //
Vestnik
Irkutskogo gosudarstvennogo tekhni-
cheskogo universiteta
[Bulletin of
Irkutsk National Research Techni-
cal University], 2018, vol. 22, no. 6,
pp. 183-195. (In Russian)
7. Hu D., Ye Zh., Gao Y., Ye Z., Peng Y.,
Yu N. Multi-agent Deep Reinforce-
ment Learning for Voltage Control
with Coordinated Active and Re-
active Power Optimization. IEEE
Transactions on Smart Grid, 2022,
vol. 3, iss. 6. URL: https://ieeexplore.
ieee.org/document/9805763.
8. Domyshev A.V. A stochastic method
for optimal rated operating mode
control in power systems //
Energe-
tik
[Power engineer], 2021, no. 1,
pp. 11–14. (In Russian)
9. Huang Q., Huang R., Hao W., Tan J.,
Fan R., Huang Z. Adaptive Power
System Emergency Control Using
Deep Reinforcement Learning. IEEE
Transactions on Smart Grid, vol. 11,
no. 2, pp. 1171-1182. URL: https://
ieeexplore.ieee.org/document/
8787888.
10. Antoniadou-Plytaria K.E., Kouveliotis-
Lysikatos I.N., Georgilakis P.S., Hat-
ziargyriou N.D. Distributed and De-
centralized Voltage Control of Smart
Distribution Networks: Models,
Methods, and Future Research. IEEE
Transactions on Smart Grid, vol. 8,
no. 6, pp. 2999-3008. URL: https://
ieeexplore.ieee.org/document/
7874216.
11. Tomin N.V., Kurbatsky V.G., Reut-
sky I.S. Hybrid intelligent technique
for voltage / VAR control in power
systems // IET Generation, Trans-
mission and Distribution, 2019,
vol. 13, no. 20, pp .4724-4732.
12. Koshur V.D., Ryzhikova E.O. Swarm
intelligence, fuzzy inference and
multi-agent technologies in the
global optimization method /
Sbornik
nauchnykh trudov XV Vserossiyskoy
nauchno-tekhnicheskoy konferent-
sii "Neyroinformatika-2013"
[Proc.of
XVth All-Russia scienti
fi
c and tech-
nical conference "Theoretical neu-
roscience-2013"]. Part 2, Moscow,
National Research Nuclear Univer-
sity MEPhI, 2013, pp. 12-21. (In Rus-
sian)
13. Gurevich Yu.E., Libova L.E., Okin A.A.
Calculations of stability and anti-
emergency control automation in
power systems. Moscow, Energoat-
omizdat Publ., 1990. 391 p. (In Rus-
sian)
14. Voytov O.N.,Voropay N.I., Gamm A.Z.,
Golub I.N., E
fi
mov D.N. Analysis of
discontinuities in power systems.
Novosibirsk, Nauka Publ., 1999.
256 p. (In Russian)
15. Task Force C4.602. Coordinated vol-
tage control in transmission network.
CIGRE. Technical report, 2007, 285 p.
16.
Sanduleac M., Pons L., Fiorenti-
no G., Pop R., M. Albu. The un-
bundled smart meter concept in
a synchro-SCADA framework. 2016
IEEE International Instrumentation
and Measurement Technology Con-
ference Proceedings, 2016. URL:
https://ieeexplore.ieee.org/abstract/
document/7520459.
17. Kureychik V.V., Zaporozhets D.Yu.
The swarm algorithm in optimization
tasks //
Izvestiya YUFU. Tekhniches-
kiye nauki
[Bulletin of Southern Feder-
al University (SFedU). Technical sci-
ences], 2010, no. 7(108), pp. 28-32.
(In Russian)
18. Karpenko A.P. Actual algorithms of
search optimization. Algorithms in-
spired by nature. Moscow, Publish-
ing house of the Bauman Moscow
State Technical University, 2014.
448 p. (In Russian)
19.
Kessel P., Glavitsch H. Estimat-
ing the Voltage Stability of a Pow-
er System. IEEE Transactions on
Power Delivery, 1986, vol. 1, no. 3,
pp. 346354. URL: https://ieeexplore.
ieee.org/document/4308013.
20. Jiang T., Li G., Jia H., Chen H.,
Miao W. Simplied L-index and its sen-
sitivity analysis method for on-line
monitoring of voltage stability control.
Dianli Xitong Zidonghua (Automation
of Electric Power Systems), 2012,
vol. 36, No. 21. Pp. 1318. URL: https://
www.researchgate.net/publication/
289615730.
21.
Khassan T.M.A. Development of
methods of arrangement optimiza-
tion for compensators and renew-
able distributed generation in radial
networks: PhD thesis in Engineering
Science: 05.14.02. Moscow, Nation-
al Research University MPEI, 2018.
22.
Yadykin I.B., Tomin N.V., Iska-
kov A.B., Galyaev I.A. Optimal adap-
tive control of electromechanical os-
cillations modes in power systems.
IFAC-PapersOnLine, 2022, vol. 55,
no. 9, pp. 134-139. URL: https://www.
sciencedirect.com/science/article/
pii/S2405896322004098.
23. Dorogush A.V., Ershov V., Gulin A.
CatBoost: gradient boosting with cat-
egorical features support. Workshop
on ML Systems at NIPS 2017. URL:
https://www.researchgate.net/publi-
cation/32857606.
№
2 (77) 2023
Как показывает практика, принципы существующей структуры противоаварийного управления (ПАУ) в ЕЭС России как средства предотвращения нарушения устойчивости по напряжению не позволяют выполнять корректное ПАУ в нерасчетных режимах и при ненормативных возмущениях, которые возникают при системных авариях. Эффективным решением может стать дополнение существующей системы ПАУ интеллектуальными комплексами. В статье предложена концепция новой интеллектуальной автоматики регулирования напряжения и реактивной мощности (ИАРН) в ЭЭС, использующей мультиагентные технологии для предотвращения нарушения устойчивости по напряжению. Предложенная модель ИАРН реализует две мультиагентные подсистемы адаптивной настройки регуляторов напряжения: систему регулирования уставок автоматики регулирования возбуждения синхронных генераторов и систему управления средствами компенсации реактивной мощности, построенной по принципу виртуальной электростанции. Эффективность предложенной ИАРН продемонстрирована на примере реальной схемы Бодайбинского энергетического кольца северной части энергосистемы Иркутской области, в котором могут возникать проблемы с устойчивостью по напряжению. Рассматривается концепция внедрения предложенной ИАРН в существующую систему ПАУ ЕЭС России.