Оригинал статьи: Повышение надежности кабельно-воздушных линий электропередачи путем организации интеллектуального автоматического повторного включения
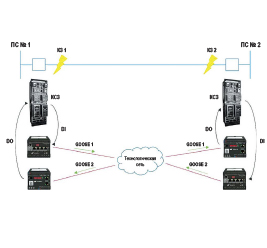
Появление кабельно-воздушных линий электропередачи (КВЛ) 110 кВ и выше предъявляет новые требования к устройствам релейной защиты и автоматики (РЗА) линий электропередачи (ЛЭП). Одной из наиболее актуальных является проблема реализации автоматического повторного включения (АПВ), то или иное решение которой значительно влияет на надежность и эффективность функционирования КВЛ. В ряде стран используется как неселективное АПВ, так и селективное. Предлагается интеллектуальный способ АПВ КВЛ на основе волновых методов, позволяющий повысить надежность РЗА КВЛ. Способ предполагает введение специальной процедуры распознавания волновых портретов повреждений как на кабельном, так и на воздушном участке ЛЭП.