Транспортировка электроэнергии от электростанции к потребителям является одной из важнейших задач энергетики. Транспорт электроэнергии производится преимущественно по воздушным линиям электропередачи. Для обеспечения требуемых темпов роста потребления электроэнергии и поддержания устойчивости энергосистемы в нормированном диапазоне необходимо своевременное проведение мониторинга параметров, технического обслуживания, диагностики и модернизации ВЛ.
Демидов С.Н., первый заместитель генерального директора — главный инженер ПАО «Россети Центр»
Микрюков В.В., заместитель главного инженера по технологическому развитию и инновациям ПАО «Россети Центр»
Пацев А.А., главный специалист Дирекции технологического развития и инноваций ПАО «Россети Центр»
Середкин О.А., начальник Управления технологического развития и цифровизации филиала ПАО «Россети Центр» — «Липецкэнерго»
В условиях усложнения сетевой архитектуры и увеличения эксплуатационных нагрузок кратно возрастает значимость параметров надежности и оперативной управляемости ВЛ, нарушение которых может привести к крупномасштабным техногенным авариям и сбоям в энергоснабжении.
На текущем этапе определение состояния воздушных линий производится путем обхода линии с применением автотранспорта, а в случаях, когда его использование невозможно, производится пеший осмотр.
Метод визуального осмотра представляет собой один из наиболее распространенных и базовых способов диагностики технического состояния ВЛ. Его основная цель заключается в выявлении внешних признаков повреждений, дефектов и нарушений, способных привести к ухудшению эксплуатационных характеристик линии, снижению надежности электроснабжения или возникновению аварийных ситуаций.
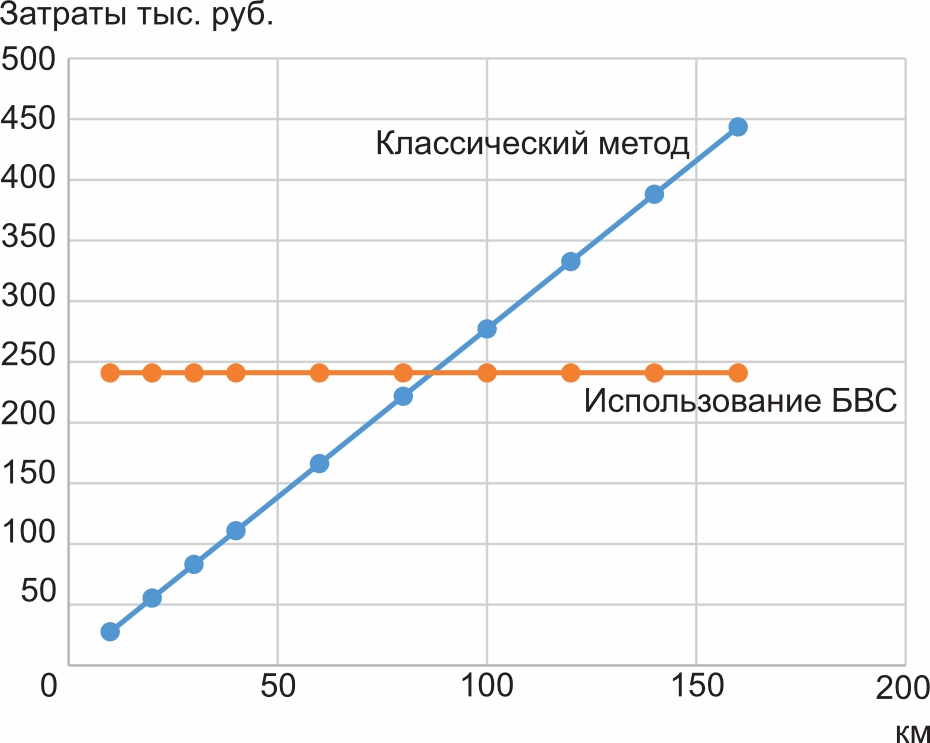
Использование технологий беспилотных воздушных судов (БВС) имеет существенно более низкую цену осмотра воздушной линии по сравнению с использованием классической схемы осмотра и при обследовании линий протяженностью от 80 км в месяц являются полностью оправданным. На рисунке 1 приведено сравнение совокупных месячных затрат по осмотру ВЛ 35/110 кВ как с помощью БВС, так и классическим методом. Данная диаграмма показывает, что при объемах месячных осмотров более 80 км использование БВС является экономически оправданным.
Система диагностики ВЛ с использованием БВС состоит из двух основных блоков: специализированного беспилотного воздушного судна и модуля анализа диагностической информации.
Источником диагностической информации для модуля распознавания дефектов является фото- и видеоматериал, получаемый от специализированного БВС, оснащенного управляемым подвесом и диагностическими сенсорами, которые управляются автопилотом БВС.
В статье рассматриваются вопросы разработки специализированного БВС, а также алгоритмов проведения полета для обследования ВЛ 35/110 кВ, разработанные в ПАО «Россети Центр» в ходе реализации проекта НИОКР «Разработка программного-аппаратного комплекса для интеллектуального обнаружения объектов исследования и автоматического построения полетных заданий беспилотных воздушных средств различного типа».
РАЗРАБОТКА ИНТЕЛЛЕКТУАЛЬНОГО БВС ДЛЯ ОБСЛЕДОВАНИЯ ВЛ
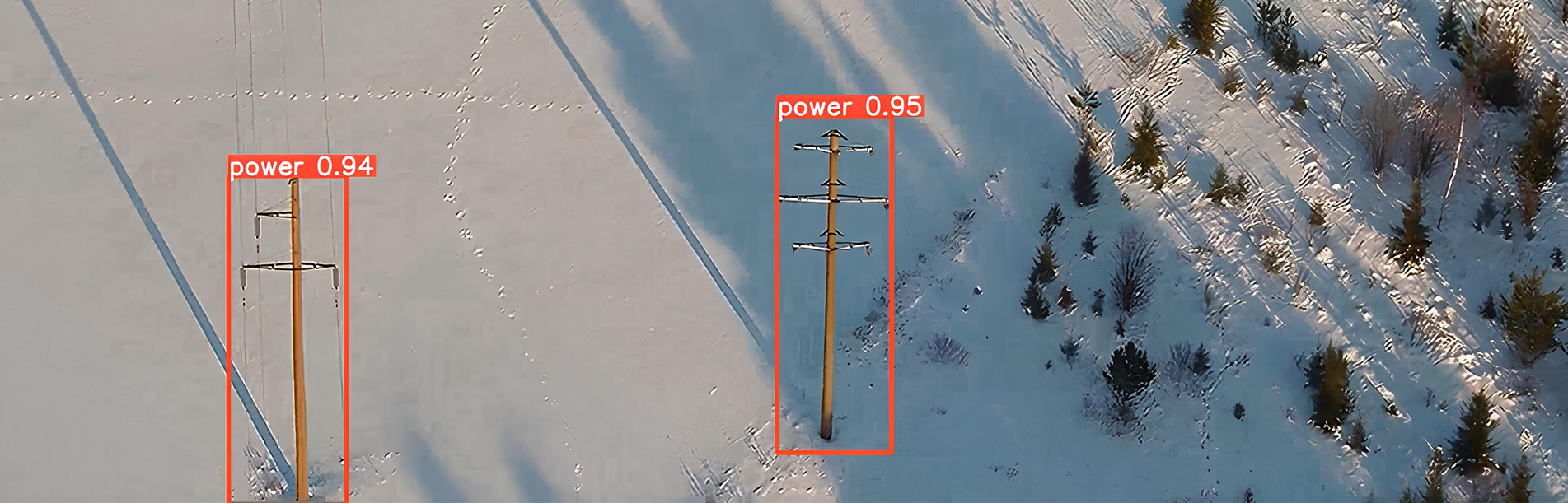
Выявления большинства дефектов ВЛ 35/110 кВ (состояние изоляции, виброгасителей, охранной зоны и т.д.) производится с помощью оптических камер. Для этого полученные с БВС фотографии подаются на вход нейросететвых моделей, отвечающих за распознавание элементов ВЛ, далее алгоритмы определения дефектов производят идентификацию самих дефектов ВЛ.
Анализ существующего рынка БВС показал: в настоящее время отсутствует аппараты, созданные непосредственно для осмотра ВЛ 35/110 кВ.
Рассмотрим возможности существующих на рынке типов БВС, а также фотокамер для проведения диагностики ВЛ 35/110 кВ. Минимальная высота полета БВС — 100 м. Скорость — 80 км/ч. Шаг съемки — 25–30 м. Крепление камеры к корпусу БВС — жесткое без использования стабилизированного подвеса. При этих условиях съемки камеры с фокусным расстоянием 35 мм позволяют получать фотографии, разрешения которых достаточно только для диагностики состояния охранной зоны. Разрешение таких элементов, как виброгаситель, аппаратные зажимы, изоляторы и т.д., составляет всего 5–10 пикселей и недостаточно для использования нейросетевых алгоритмов.
Установка на данные БВС длиннофокусной оптики с фокусным расстоянием 70 мм и более, совместно с фотоаппаратом не менее 61 мпкс позволяет поднять разрешение небольших элементов опоры до значений, достаточных для работы нейросетевых алгоритмов. Однако невозможно установить тяжелые длиннофокусные объективы на БВС, старт которых производится с катапульты или эластичной резины. Использование БВС типа конвертоплан позволяет получить хорошие результаты только при условии нахождения БВС строго над геометрической осью ВЛ. В этом случае получаемый фотоматериал будет содержать опору, расположенную строго в центре кадра, а разрешение каждого элемента ВЛ не менее 30 пикселей.
Однако в реальных условиях из-за наличия ветра, неравномерности плотности воздуха, специфики работы автопилота, неточностей в координатах опор БВС смещается относительно оси ВЛ на ±45–55 м (рисунок 2). В итоге только 15% фотографий от общего объема становятся приемлемыми для дальнейшей загрузки в нейросетевые алгоритмы.

В результате проведенных в ходе выполнения работы исследований сформулированы следующие основные требования к автопилоту БВС, алгоритмам работы подвеса и правилам проведения диагностического полета, позволяющие с вероятностью 95% получить качественный фотоматериал для дальнейшей работы нейросетевых алгоритмов:
- БВС должен всегда находиться над геометрической осью ВЛ, автопилот обеспечивает движение БВС относительно геометрической оси ВЛ с заданным смещением 0±100 м, величина отклонения от курса не должна превышать 1 м;
- при любых колебаниях БВС в процессе полета подвес всегда ориентирован на среднюю траверсу ВЛ;
- БВС в процессе полета способен интеллектуально изменять полетное задание и корректировать курс исходя из уточненных координат опор.
Корректировка курса БВС проводится в процессе полета, на основании данных работы нейросетевых алгоритмов, которые определяют опору, а затем рассчитывают ее точную координату. Все вычисления проводятся непосредственно на борту БВС (рисунок 3).

Применяемая модель сверточной нейронной сети отличается высокой производительностью даже на встроенном графическом ускорителе NPUs, обеспечивая обработку данных со скоростью порядка 10 FPS. В качестве вычислителя используется микрокомпьютер ROCRK3588, интегрированный непосредственно с автопилотом БВС. Математическая модель разработанной нейросетевой модели может быть описана следующим образом:
out = φ(Σin=1xiwi),
где φ — функция активации; Σni=1xiwi — взвешенная сумма, как сумма n произведений входных сигналов на соответствующие веса.
Перед началом обучения нейросети выполняются ключевые этапы:
- создается база данных, содержащая фотографии опор ЛЭП, аннотированные инструментами разметки;
- изображения обрабатываются методами аугментации (яркость, зеркальность, масштабирование и др.) для увеличения разнообразия примеров;
- датасет разделяется на три части (обучающий — 75%, валидный — 15% и тестовый — 10%).
Для обучения нейросети произведен отбор фотографий с различными изображениями опор, проведена их разметка. Каждое изображение маркируется инструментом LabelMe, отмечающим точное расположение и размер опор.
После настройки нейросетевая модель переобучается на собственном датасете с акцентом на классификацию двух типов опор (бетонные и металлические).
Выработан следующий алгоритм проведения диагностического полета (рисунок 4):
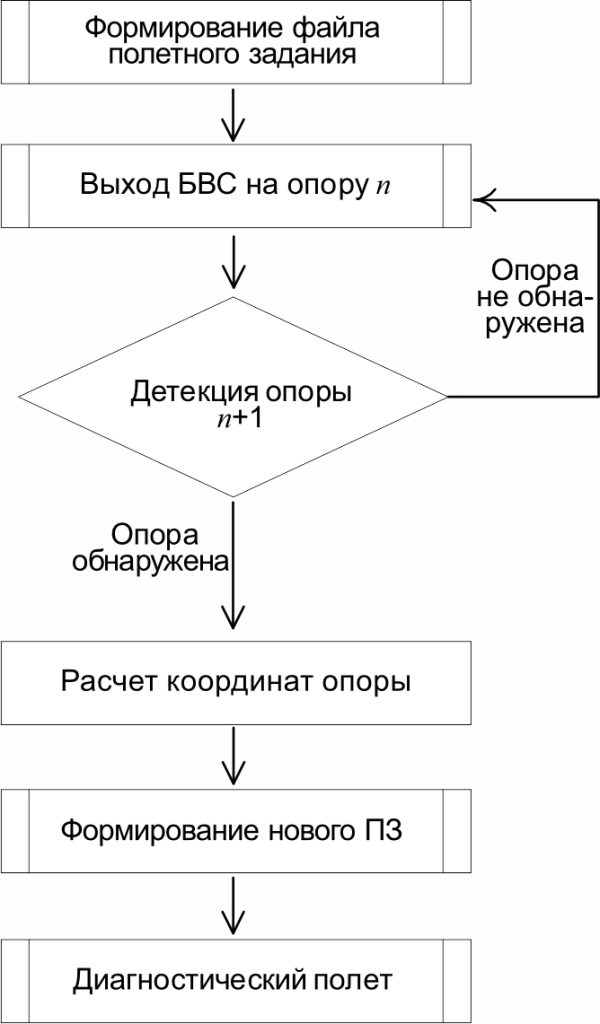
- подготовка исходных данных, загрузка в программное обеспечение БВС;
- выход БВС на первую опору, запуск алгоритма поиска и расчета центра координат опор;
- получение новой матрицы координат для формирования полетного задания;
- формирование полетного задания, загрузка в автопилот;
- в зависимости от поставленной задачи запуск алгоритма центрирования повеса, ориентация подвеса на объекте интереса;
- проведение диагностического полета.
Разработанное в рамках НИОКР решение позволяет реализовать точное позиционирование БВС в пространстве и дает возможность реализовать следующие алгоритмы, недоступные при использовании классических БВС. Их задачей является получение сопоставимых фотоснимков опоры, а также ее трехмерной модели опоры.
Алгоритм № 1. Область применения — получение детализированных снимков опоры, анализ состояния охранной зоны ВЛ. БВС располагается над осью ВЛ, при этом камера наклонена на 45 (90) градусов относительно горизонта. БВС смещается от оси на величину ΔH (0–100 м), при этом камера отклоняется на угол 45 градусов по горизонтали и 45 градусов по вертикали.
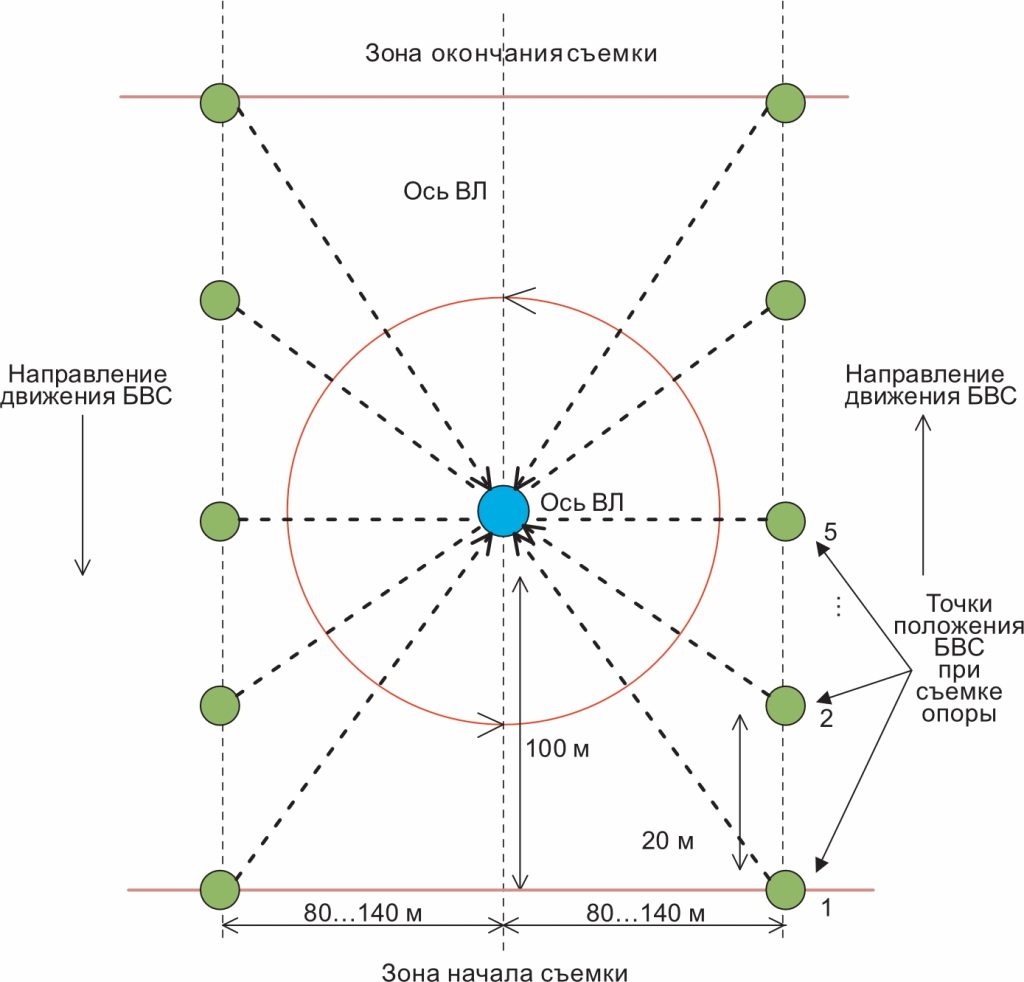
Алгоритм № 2. Область применения — получение набора фотографий опоры с перекрытием 60–70%, создание трехмерной модели опоры. Применение алгоритма точного позиционирования БВС со смещением относительно геометрической оси ВЛ позволяет получить качественные исходные данные для построения трехмерного изображения опоры ВЛ. Исходя из уточненных координат центров опор формируется два полетных задания со смещением Δ±h относительно геометрической оси ВЛ. Формируется матрица пространственных координат зоны съемки, а также точки полетного задания БВС. При попадании БВС в зону проведения съемки запускается алгоритм, при котором подвес центрируется на пространственной координате, совпадающей с центром средней траверсы ВЛ 35/110 кВ. Выполняется интервальная съемка с шагом 20 м, в процессе сьемки подвес всегда ориентируется на координату средней траверсы опоры (рисунок 5).
До реализации описанного выше алгоритма диагностика ВЛ проводилась фактически по единичному снимку опоры. Если данный снимок оказывался дефектным, то процент распознавания элементов опоры снижался с 90–95% до 40–50%, в результате вероятность верного определения дефектов не превышала 45%. При использовании данного алгоритма количество снимков на одну опору возрастает с 1 до 10. Это позволяет: на первом этапе определить снимок с максимальным количеством распознанных элементов. Далее производится поиск нераспознанных элементов опоры в остальных 9 фото. Если элемент не обнаружен, то с вероятностью 95% можно утверждать, что данный элемент в опоре отсутствует.
Существенным недостатком разработанных ранее алгоритмов является невозможность точного определения причины отсутствия элемента опоры, связанной или с неверной работой нейросетевых алгоритмов, или с его физическим отсутствием. Предложенный выше алгоритм исключает подобные недостатки.
ЗАКЛЮЧЕНИЕ
Применение специализированного БВС, оснащенного интеллектуальной системой коррекции курса, позволило на 32% поднять уровень распознавания элементов опоры, что, в свою очередь, увеличило процент распознавания дефектов на 27%.
За период эксплуатации комплексной системы по анализу ВЛ с применением специализированного БВС было проведено 32 полета, общее время нахождения БВС в воздухе составило 65 часов, за это время было диагностировано 715 км ВЛ 35–110 кВ, общий объем полученного фотоматериала составил более 45 тысяч фото, выявлено более 948 дефектов, из которых 78% — это нарушение охранных зон ВЛ и оставшиеся 22% — это дефекты опор, арматуры и проводов.
Ключевой эффект от применения комплексных систем БВС — высвобожденный временной ресурс сотрудников компании — направляется не на поиск дефектов, а на их предупреждение и устранение.![]()