24
возобновляемая энергетика
Оценка гибкости
электроэнергетической
системы с ветровыми
станциями и накопителями
энергии в режиме реального
времени
УДК 621.311.24:621.316
Глазунова
А
.
М
.,
д.т.н., доцент,
старший научный
сотрудник отдела
электроэнергетических
систем Института систем
энергетики им. Л.А.
Мелентьева CО РАН
Аксаева
Е
.
С
.,
к.т.н., научный
сотрудник отдела
электроэнергетических
систем Института систем
энергетики им. Л.А.
Мелентьева CО РАН
Ключевые
слова
:
гибкость электро энер-
гетической системы,
детерминистические
методы, критерий
оптимальности
Внедрение
возобновляемых
источников
энергии
в
энергосистему
стало
причи
–
ной
появления
неопределенностей
параметров
режима
на
стороне
генерации
.
Необходимость
учета
этих
неопределенностей
при
управлении
электроэнер
–
гетической
системой
(
ЭЭС
)
превратила
задачу
оценки
гибкости
ЭЭС
в
одну
из
наиболее
важных
задач
оперативно
–
диспетчерского
управления
.
В
статье
пред
–
ставлен
детерминистический
метод
оценивания
гибкости
запланированного
(
нормального
)
режима
ЭЭС
с
ветровыми
станциями
и
с
накопителями
энергии
в
режиме
реального
времени
.
Метод
основан
на
утверждении
о
том
,
что
ЭЭС
обладает
гибкостью
,
если
имеется
возможность
компенсировать
небалансы
мощности
в
течение
рассматриваемого
времени
.
Сначала
вычисляется
сочета
–
ние
неопределенностей
(
отклонение
мощности
от
прогнозных
значений
)
в
на
–
грузочных
узлах
,
при
малом
превышении
которых
ЭЭС
становится
неспособной
поддерживать
баланс
мощности
(
теряет
гибкость
).
Данная
задача
решается
как
задача
линейной
оптимизации
.
В
качестве
критерия
оптимальности
использует
–
ся
максимальное
отклонение
значений
активных
нагрузок
от
запланированных
величин
с
учетом
заданных
ограничений
.
Затем
вычисляется
гибкость
ЭЭС
.
С
табильная и безопасная работа электроэнергетической сис-
темы (ЭЭС) возможна при наличии резервов для поддержа-
ния баланса мощности между генерацией и потреблением
в нормальных и послеаварийных режимах. В [1] нормальные
режимы характеризуются запланированными и незапланированными
изменениями параметров режима, которые определяются изменчиво-
стью и неопределенностью параметров режима энергосистемы соот-
ветственно. Неопределенности на стороне генерации мощности возни-
кают вследствие внедрения в ЭЭС зависимых от природных условий
возобновляемых источников энергии. Способность ЭЭС поддерживать
баланс мощности в условиях изменчивости и неопределенности в те-
чение заданного времени с учетом пропускных способностей связей
называется гибкостью ЭЭС [2]. В качестве резервов мощности или ис-
точников обеспечения гибкости [2] (далее источники гибкости от англ.
Sources of Flexibility) рассматриваются:
1. Резервная мощность генерации [3, 4]. Тепловые и гидроэлектро-
станции, обладающие свойством быстро увеличивать и сбрасы-
вать нагрузку, обеспечивают гибкость ЭЭС на стороне генерации.
Резервная мощность используется в случае незапланированного
увеличения или уменьшения нагрузки. В [2] рассматриваются проб-
лемы, связанные с резервами, представлена техническая класси-
фикация резервов и экономическая сторона вопроса. Отмечается,
что все имеющиеся резервы могут быть поделены на регулирующие
и аварийные. Регулирующие резервы предназначены для компен-
25
сации неопределенностей на стороне спроса,
связанных с ошибкой прогноза потребления, и на
стороне генерации, возникающих из-за изменчи-
вости природных условий. В [3] дана информация
об оперативных резервах, используемых в США
и Европе. В [4] приведена методика определения
минимально необходимых объемов резервов ак-
тивной мощности ЭЭС России.
2. Механизмы управления активными потребителя-
ми [5, 6]. Разнообразные механизмы управления
нагрузкой, появившиеся в результате развития
новых технологий, решают проблему гибкости на
стороне потребителей. Механизмы управления
спросом применяются для корректировки мощ-
ности нагрузки: бытовой [7], сектора обслужива-
ния [8], промышленности [9].
3. Накопители энергии [10]. С внедрением ветровых
и солнечных электростанций важными средства-
ми обеспечения гибкости становятся накопители
энергии. Они используются для сохранения и вы-
дачи энергии в определенный отрезок времени.
Технологии сохранения энергии основываются на
разных физических принципах. На сайте [10] дана
следующая классификация накопителей: меха-
нические — это маховики, гидроаккумуляторы,
пневматические аккумуляторы; электрические —
конденсаторы и суперконденсаторы (ионисторы);
электрохимические — аккумуляторные батареи,
водородные топливные ячейки, нано-ионные
ячейки. В [11] описаны сверхпроводящие магнит-
ные накопители энергии, которые хранят энергию
в магнитном поле, созданном потоком постоянно-
го тока в катушке с нулевым электрическим со-
противлением, охлажденной ниже характерной
критической температуры.
4. Объединение ЭЭС [12]. При объединении ЭЭС
улучшается их гибкость, вследствие появления
возможности использовать имеющиеся в сосед-
ней ЭЭС резервы активной мощности. При нали-
чии ветровой электростанции в ЭЭС в случае из-
менения скорости ветра мощность, необходимая
для сохранения баланса, может быть получена по
межсистемным связям [12].
5. Создание мультиэнергетических систем [13]. При
создании мультиэнергетических систем (МЭС)
возникают дополнительные источники гибкости
ЭЭС. Мультиэнергетические системы, где элек-
тричество взаимодействует с другими секторами
энергии (охлаждение, отопление, транспорт, газ,
водород и т. д.), обладают большей гибкостью, чем
отдельно взятые электроэнергетические системы.
В [13] представлен подробный обзор работ, свя-
занных с оцениванием технической гибкости МЭС
и, в частности, распределенных МЭС, отмечается
высокий потенциал таких сис тем для поддержания
гибкости при внедрении возобновляемых источни-
ков энергии. Авторы статьи описывают ключевые
аспекты моделирования МЭС и вводят концепцию
«Мультиэнергетический узел».
Проблемы наличия, отсутствия и запаса гибкости
в энергосистеме решаются исследователями мно-
гих стран. В настоящее время разработаны вероят-
ностные, детерминистические методы определения
гибкости и методы, использующие искусственный
интеллект.
В [14] предлагается детерминистический метод
для определения диапазона максимальных неопре-
деленностей, при которых система остается гибкой
в течение указанного времени для заданной цены.
Метрика гибкости вычисляется в результате сравне-
ния полученного диапазона с целевым диапазоном.
Авторы [15] вычисляют гибкость термостатической
контролируемой нагрузки при подключении ее к сис-
теме. Множество допустимых графиков таких нагру-
зок представляется многогранником, агрегирован-
ная гибкость определяется как сумма Минковского.
В статье [15] описаны оптимизационные алгоритмы,
предложенные для аппроксимации многогранников
гомотетиями (преобразование подобиями) данного
выпуклого множества, представленного моделью
виртуальной батареи.
Авторы [16] разработали вероятностный метод
вычисления ожидания недостаточности ресурсов
для обеспечения гибкости (IRRE — the insuffi cient
ramping resource expectation). Для каждого на-
правления и временного горизонта формируется
распределение вероятности доступных ресурсов
гибкости. Авторы [17] рассчитывают остаток гибко-
сти, который является разницей между доступной
гибкостью и ожидаемым изменением нагрузки для
каждого наблюдения и временного горизонта. В ра-
боте определяется вероятность недостаточности
ресурсов в сис теме.
В [18] искусственная нейронная сеть (ИНС) ис-
пользуется для моделирования гибкости распреде-
ленных энергетических ресурсов. Обученная ИНС
оценивает, не нарушается ли гибкость конкретных
распределенных энергетических ресурсов при за-
данном (исследуемом) графике нагрузки. Преимуще-
ство этого подхода заключается в отсутствии необхо-
димости создавать точные модели распределенных
ресурсов.
В данной статье представлен детерминистиче-
ский метод оценивания гибкости запланированного
режима ЭЭС с накопителями энергии. Предложен
критерий для определения сочетания небалансов,
возникающих из-за ошибок прогноза (неопределен-
ностей) в нагрузочных узлах, при малом превыше-
нии которых ЭЭС становится неспособной поддер-
живать баланс мощности (теряет гибкость). Данная
задача решается как задача линейной оптимизации
с ограничениями в виде равенств и неравенств. Па-
раметром оптимизации является величина
z
, исполь-
зующаяся для моделирования разнообразных нагру-
зок. На основе предложенного критерия вычисляется
гибкость ЭЭС. Представление задачи определения
максимального отклонения от запланированного ре-
жима как задачи линейной оптимизации позволяет
уменьшить время вычисления гибкости ЭЭС. Струк-
тура статьи следующая: во втором разделе пред-
ставлена формулировка проблемы; в третьем раз-
деле описано моделирование источников гибкости
ЭЭС и моделирование различных нагрузок в нагру-
зочных узлах (в качестве источников гибкости рас-
№
3 (66) 2021
26
сматриваются оперативные резервы и накопители
энергии); в четвертом разделе дана основная идея
метода, представлены критерий оптимальности и це-
левая функция вычисления максимальных нагрузок,
прописаны ограничения; в пятом разделе дано под-
робное описание метода вычисления гибкос ти; в ше-
стом разделе приведены результаты исследований;
в заключении представлены выводы, полученные
в результате анализа выполненной работы.
ФОРМУЛИРОВКА
ПРОБЛЕМЫ
Задача краткосрочного прогнозирования параметров
электроэнергетического режима является одной из
главных оперативно-диспетчерских задач, результа-
ты которой используются при управлении ЭЭС. Ре-
альный режим отличается от прогнозируемого из-за
наличия ошибок прогноза, которые складываются из
ошибок метода прогнозирования, непредвиденно-
го изменения мощности нагрузки, непредвиденного
изменения генерации на ветровой (солнечной) элек-
тростанции. Ошибки прогноза невозможно предска-
зать, поэтому они относятся к разряду неопределен-
ностей, которые в реальной ЭЭС представляются
в виде нерегулярного и кратковременного изменения
активной мощности. Компенсация небалансов мощ-
ности в таких случаях осуществляется за счет резер-
вов регулирования мощности (оперативный резерв).
Способность ЭЭС поддерживать баланс мощности
при нерегулярных и кратковременных изменениях
активной мощности в течение указанного време-
ни (в представленном исследовании) называется
гибкос тью ЭЭС. С целью оптимального управле-
ния режимами ЭЭС с ветровыми электростанциями
и с установленными нормативными объемами ре-
зервов предлагается оценивать гибкость ЭЭС в ре-
жиме онлайн. Полученная каждые несколько минут
информация о гибкости, включающая максималь-
ные значения и сочетания возможных небалансов
(неопределенностей), которые не приводят к дефи-
циту мощности, может быть использована в процес-
се оперативной коррекции режимов.
Данная работа посвящена проблеме определения
гибкости ЭЭС с ветровой электростанцией и аккуму-
ляторной батареей в режиме онлайн. Задача вычис-
ления гибкости нормального режима с упреждением
десять минут решается по следующему алгоритму:
– осуществляется сбор информации о параметрах
режима (поступает очередной срез измерений);
– выполняется прогнозирование режима с упреж-
дением 10 минут, прогнозный режим (далее —
запланированный) отличается от реального (неза-
планированного) из-за наличия ошибок прогноза;
– вычисляется гибкость прогнозного режима.
Для задач, выполняемых в режиме онлайн, од-
ним из главных требований является приемлемая
скорость получения решений. В предлагаемом авто-
рами алгоритме выполнение этого условия достига-
ется за счет введения ряда допущений и упрощений.
Допущения используются при выборе показателей
и средств гибкости. В качестве упрощений рассма-
триваются решение линейной оптимизационной
задачи и упрощенное вычисление перетоков мощ-
ности, которые требуются для записи ограничений.
С целью определения корректности полученных
с помощью линейной оптимизации результатов рас-
считывается установившийся режим методом Нью-
тона, где в качестве независимых переменных ис-
пользуются результаты оптимизации. Выявленная
разница между значениями мощности в балансиру-
ющем узле находится в заданных пределах.
МОДЕЛИРОВАНИЕ
ГИБКОСТИ
ЭЛЕМЕНТОВ
ЭЭС
И
МНОЖЕСТВА
НАГРУЗОК
В данной работе гибкость запланированного режима
ЭЭС характеризуется тремя показателями: скорость
изменения мощности (
R
), максимальная (мини-
мальная) генерации (
P
) и энергоемкость (
E
). Каждый
индекс является производной по времени от преды-
дущего индекса [2].
При вычислении гибкости ресурсов ЭЭС:
– допускается, что скорость включения гибкого
ресурса (
R
) равна времени упреждения, на кото-
рое вычисляется гибкость;
– учитывается показатель максимальной и мини-
мальной генерации (
P
);
– принимается во внимание, что конечная энер-
гоемкость батареи (
E
) ограничивает ее возмож-
ности.
Модель
гибкости
генераторов
на
традици
–
онной
станции
.
Гибкость генератора определяется
мощностью, которая может быть дополнительно сге-
нерирована на момент окончания рассматриваемого
горизонта и вычисляется по формуле:
F
g
=
P
g
(раб)
–
P
g
(тек)
,
(1)
где
P
g
(раб)
— рабочая мощность,
P
g
(тек)
— мощность
генератора в рассматриваемый момент времени.
Модель
гибкости
батареи
.
Гибкость батареи
определяется степенью заряженности батареи и те-
кущей мощностью. Если батарея заряжена в задан-
ных пределах,
SOC
min
<
SOC
(
t
) <
SOC
max
,
(2)
то отдаваемая мощность вычисляется по формуле:
F
B
=
P
B
(
max
)
–
P
B
(тек)
,
(3)
иначе
F
B
= 0,
(4)
где
SOC
— заряд батареи (state of charge),
SOC
min
—
минимальное значение заряда,
SOC
max
— макси-
мальное значение заряда,
P
B
(тек)
— мощность бата-
реи в рассматриваемый момент времени.
Модель
гибкости
системы
в
рассматривае
–
мый
момент
времени
.
Модель гибкости системы
F
S
записывается как сумма гибкостей, доступных на
всех объектах гибкости в рассматриваемый момент
времени. При наличии двух видов единиц гибкости
F
S
рассчитывается по формуле:
F
S
=
1
m
F
g
+
1
n
F
B
,
(5)
где
m
— количество генераторов на традиционных
станциях;
n
— количество батарей.
ВОЗОБНОВЛЯЕМАЯ
ЭНЕРГЕТИКА
27
Моделирование
множества
разнообразных
нагрузок
.
Активная мощность нагрузки в каждом за-
данном узле
i
вычисляется по формуле [14]:
P
i
(
z
i
) =
z
i
P
i
min
+ (1 –
z
i
)
P
i
max
,
(6)
где 0 ≤
z
i
≤ 1,
P
i
max
— максимальная мощность нагруз-
ки в узле
i
,
P
i
min
— минимальная мощность нагрузки
в узле
i
.
Множество возможных нагрузок для
k
-го режи-
ма формируется по алгоритму, показанному на ри-
сунке 1.
ОСНОВНАЯ
ИДЕЯ
МЕТОДА
.
КРИТЕРИЙ
ОПТИМАЛЬНОСТИ
.
ЦЕЛЕВАЯ
ФУНКЦИЯ
И
ОГРАНИЧЕНИЯ
В основу разработанного метода положено утверж-
дение о том, что ЭЭС обладает гибкостью, если со-
блюдается баланс мощности в течение рассматрива-
емого времени при наличии неопределенностей со
стороны потребителей и производителей мощности.
При некотором сочетании нагрузок и значений ге-
нерации на ветровых (солнечных) электростанциях
для сохранения баланса в работу вводится весь ре-
зерв мощности, предназначенный для сглаживания
неопределенностей, который может быть передан
с учетом пропускных способностей связей. Такой
установившийся режим (УР) ЭЭС характеризуется
минимальной гибкостью (далее УР с минимальной
гибкостью), так как малое превышение нагрузки
в узле приведет к дефициту мощности в ЭЭС.
Задача вычисления УР с минимальной гибкос-
тью решается как задача линейной оптимизации.
Критерием оптимальности является максимальная
разность между значениями активных мощностей
в узлах с неопределенностью в запланированном
режиме и в режиме с минимальной гибкостью. Па-
раметрами оптимизации являются компоненты век-
тора
z
, отвечающие за моделирование величины
нагрузки в нагрузочных узлах от минимального до
максимального значений (рисунок 1).
Целевая функция — максимум суммы модулей
разностей между запланированными и смодели-
рованными мощностями в узлах с неопределенно-
стью — записывается следующим образом:
J
(
z
) =
r
i
= 1
|
P
i
–
P
i
(
z
i
)| =
r
i
= 1
|∆
P
i
(
z
i
)| →
max
, (7)
где
i
— номер узла с неопределенностью;
P
i
— про-
гноз активной мощности в узле
i
;
P
i
(
z
i
) — зависи-
мость активной мощности от величины
z
, отвечаю-
щей за изменение нагрузки в узле
i; r
— количество
узлов с неопределенностью. В данном случае это —
нагрузочные узлы, узлы, где выполняются управляю-
щие воздействия, и балансирующий узел.
Ограничения имеют следующий вид:
P
i
= 0,
(8)
P
i
–
j
<
P
m
i
ax
–
j
,
(9)
P
i
min
<
P
i
УВ
<
P
i
max
,
(10)
P
i
min
<
P
i
Б
<
P
i
max
,
(11)
0 ≤
z
i
≤1.
(12)
Ограничение (8) — это баланс мощности в узле
i
или
баланс мощности в ЭЭС, (9) — ограничение по про-
пускной способности линии, (10)–(11) ограничивает
диапазон управляющих воздействий (УВ) в управля-
емом и в балансирующем узлах, (12) — ограничение
на параметр оптимизации.
ОПРЕДЕЛЕНИЕ
ГИБКОСТИ
ЭЭС
А
.
Метрика
гибкости
.
Метрикой гибкости систе-
мы является величина, вычисленная в соответствии
с предложенным критерием оптимальности (7):
F
S
=
R
i
= 1
F
s
(
i
)
=
R
i
= 1
(
P
i
calc
(
z
) –
P
i
),
(13)
где
P
i
— активная нагрузка в узле
i
в запланирован-
ном режиме;
P
i
calc
(
z
) — величина нагрузки в узле
i
, вы-
численная по (6), где значения вектора
z
являются
результатом линейной оптимизации. Если
F
S
> 0, то
исследуемая ЭЭС является гибкой.
F
s
(
i
)
показывает
возможные отклонения мощностей в каждом нагру-
зочном узле от запланированного режима, с которы-
ми может справиться ЭЭС.
В
.
Задача
линейной
оптимизации
.
В процессе
оптимизации определяется вектор параметров
z
, ко-
торые используются для моделирования разнообраз-
ных нагрузок. Для решения поставленной задачи фор-
мируется целевая функция и ограничения (8)–(12).
ЦЕЛЕВАЯ
ФУНКЦИЯ
Каждый элемент (7) с учетом (6) может быть пред-
ставлен следующим образом:
J
(
z
) =
P
i
(
z
i
) = |
P
i
–
P
i
(
z
i
)|_ =
=
P
i
–
P
i
max
+
z
i
P
i
max
–
z
i
P
i
min
=
D
i
+
F
i
z
i
.
(14)
Начало (
k
= 1,
i
= 1)
Конец
Задаются векторы
P
i
min
= (
P
1
min
,
P
1
min
, …,
P
l
min
, …,
P
R
min
),
P
i
max
= (
P
1
max
,
P
1
max
, …,
P
l
max
, …,
P
R
max
)
(
R
— количество нагрузочных узлов)
Вычисляется значение нагрузки по (6)
Да
Нет
i
=
i
+ 1
i
=
N
·
R
?
z
i
+ 1
=
=
z
i
+
step
Задается вектор
z
. Вычисляется шаг изменения мощ-
ности нагрузки:
step
= 1 /
N
,
i
= 1,
где
N
— число шагов,
i
— номер шага
Определение всех возможных значений нагрузок.
Результат: архив нагрузок
P
S
k
размерностью [
L
×
R
],
где
L
=
C
N
R
Рис
. 1.
Алгоритм
вычисления
множества
нагрузок
№
3 (66) 2021
28
Величины, независящие от параметра оптимиза-
ции, обозначаются как
D
i
и
F
i
.
P
i
–
P
i
max
=
D
i
,
(15)
P
i
max
–
P
i
min
=
F
i
.
(16)
С учетом (14) целевая функция (7) записывается
как сумма слагаемых:
D
1
+
z
1
F
1
+ … +
D
i
+
z
i
F
i
+ … +
D
R
+
z
R
F
R
→
max
,
(17)
и при исключении всех независимых от параметров
оптимизации величин имеет вид
r
i
= 1
|
F
i
z
i
| →
max
.
(18)
ОГРАНИЧЕНИЯ
Поиск оптимальных параметров выполняется с уче-
том ограничений в виде равенств и неравенств.
Ограничения в виде равенств — это балансы актив-
ной мощности в системе и в узлах с неопределенно-
стью. Ограничения в виде неравенств вводятся для
осуществления контроля за пропускной способно-
стью линий и за пределами мощностей в узлах с не-
определенностью. Параметры УР вычисляются при-
ближенно методом PTDF (power transfer distribution
factor — коэффициент распределения потоков мощ-
ности) [19]. С помощью коэффициентов, полученных
этим методом, учитываются изменения перетоков
активной мощности в линиях электропередачи при
изменении мощности в узле. Коэффициенты распре-
деления перетоков мощности в линии, ограниченной
узлами
i
и
j
, вычисляются заранее по формуле:
k
i
–
j
=
P
i
–
j
/
P
A
(
z
A
),
(19)
P
A
(
z
A
) =
R
i
= 1
P
i
(
z
i
),
(20)
где
P
A
— изменение мощности в узле, в котором вы-
полняются управляющие воздействия (размер УВ);
P
i
–
j
— изменение перетока мощности в линии
i
–
j
;
P
i
— изменение мощности в нагрузочном узле с не-
определенностью.
При решении задачи линейной оптимизации ко-
эффициенты
k
i
–
j
являются исходной информацией.
Ограничения
в
виде
равенств
.
Баланс мощности
в системе:
N
i
–
=
R
1
P
i
+
r
j
= 1
P
j
(
z
j
) +
= 0
(21)
c учетом (6) и после некоторых преобразований за-
писывается следующим образом:
r
j
= 1
F
j
z
(
j
) =
r
j
= 1
P
j
max
+
n
i
–
=
r
1
P
i
+
,
(22)
где
n
— количество узлов в системе;
— потери ак-
тивной мощности в системе. В работе допускается,
что потери меняются незначительно, вычисляются
в запланированном режиме и остаются постоянными.
Баланс мощности в узлах с неопределенностью
составляется в виде баланса приращений мощности:
P
i
+
G
j
= 1
P
i
–
j
= 0,
(23)
P
i
–
j
=
P
A
(
z
A
)
k
i
–
j
,
(24)
где
P
i
— приращение мощности инъекции в узле
i
(
P
i
=
P
i
–
P
i
(
z
i
);
P
i
–
j
— приращение мощности в ли-
нии
i
–
j
;
G
— количество смежных узлов.
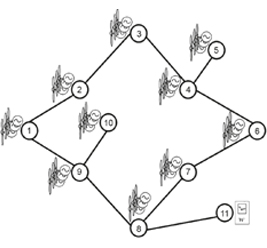
Рис
. 2.
Тестовая
схема
ВОЗОБНОВЛЯЕМАЯ
ЭНЕРГЕТИКА
С учетом (16), (24) ограничение в узле
i
записы-
вается:
F
A
Z
A
g
j
= 1
k
i
–
j
+
F
i
Z
i
= –
P
i
–
P
i
max
G
j
= 1
k
i
–
j
. (25)
Баланс мощности в балансирующем узле записы-
вается:
F
A
z
A
G
j
= 1
k
s
–
j
+ (
F
A
–
R
i
–
=
1
1
F
i
z
s
=
= (
P
A
max
–
P
A
)
G
j
= 1
k
s
–
j
+
P
A
max
–
P
A
–
–
R
i
= 1
P
i
max
+
R
i
= 1
P
i
,
(26)
где
i
≠
s
,
s
— номер балансирующего узла.
Ограничения в виде неравенств. Переток мощно-
сти в линиях контролируется по выражению (9):
P
i
–
j
+
k
i
–
j
∆
P
A
(
z
A
) <
P
i
–
j
max
(27)
или при переносе постоянных величин в правую
часть (с учетом (19) при
i
=
A
) ограничение имеет вид:
F
A
k
i
–
j
z
A
<
P
i
–
j
max
–
P
i
–
j
–
k
i
–
j
(
P
A
–
P
A
max
).
(28)
Ограничения по мощности в узлах с неопреде-
ленностью записываются следующим образом:
P
i
min
<
P
_
i
<
P
i
max
.
(29)
ПРАКТИЧЕСКИЕ
РЕЗУЛЬТАТЫ
А
.
Описание
тестовой
схемы
и
сценария
.
Разра-
ботанный метод применяется для вычисления гиб-
кос ти ЭЭС (рисунок 2), состоящей из 6 узлов и 6 ли-
ний. Узлами 1 и 5 обозначаются ветровая станция
и батарея. Узлы 2 и 6 представляют собой тради-
ционные станции. Узлы 3, 4 — это нагрузки. Узлами
с неопределенностью являются узлы 2, 3, 4, 6 (ба-
лансирующий). В узле 2 выполняются УВ.
Расчеты выполняются по сценарию: необходимо
вычислить гибкость ЭЭС для двух режимов на 10 ми-
нут вперед. Режимы отличаются друг от друга мощ-
ностью батареи.
Допускается, что за 10 минут включается весь
оперативный резерв, имеющийся на традиционной
станции, и батарея выдает максимальную мощность.
Максимальные и минимальные значения активных
мощностей в узлах с неопределенностью и активные
мощности двух УР в запланированных на 10 минут
вперед режимах показаны в таблице 1.
В
.
Вычисление
гибкости
6-
узловой
схемы
.
Ре-
шение данной задачи может быть представлено не-
сколькими шагами.
Первый
шаг
.
Определение параметров режима
на 10 минут вперед (таблица 1).
29
Второй
шаг
.
Вычисление коэффициентов
k
i
–
j
по
(19).
Третий
шаг
.
Описание целевой функции и огра-
ничений в соответствии с требованиями к входным
данным используемых программ.
Целевая функция
(
P
2
–
P
2
(
z
2
)) + (
P
3
–
P
3
(
z
3
)) +
+ (
P
4
–
P
4
(
z
4
)) + (
P
6
–
P
6
(
z
6
)) →
max
(30)
записывается следующим образом:
4
i
= 1
( –|
F
i
z
i
|) →
max
.
(31)
Аналогичные преобразования выполняются для
ограничений.
Баланс мощности в системе:
P
1
+
P
2
(
z
2
) –
P
3
(
z
3
) –
P
4
(
z
4
) +
P
5
+
P
6
(
z
6
) +
= 0 (32)
имеет вид:
4
i
= 1
(
z
i
F
i
) =
P
3
max
+
P
4
max
–
P
2
max
–
P
6
max
–
P
1
–
P
5
–
; (33)
балансы мощности в узлах 3 и 4:
P
3
+
P
3–1
+
P
3–4
= 0,
(34)
P
4
+
P
4–2
+
P
4–3
= 0
(35)
перерабатываются в уравнения:
F
2
Z
2
(
k
3–1
+
k
3–4
) +
F
3
Z
3
=
= (
P
3
–
P
3
max
) + (
P
2
–
P
2
max
)(
k
3–1
+
k
3–4
).
(36)
F
2
Z
2
(
k
4–2
+
k
3–4
) +
F
4
Z
4
=
= (
P
4
–
P
4
max
) + (
P
2
–
P
2
max
)(
k
4–2
+
k
3–4
).
(37)
Баланс мощности в балансирующем узле номер 6
записывается:
F
2
z
2
k
6–4
+ (
F
2
–
F
3
–
F
4
)
z
6
= (
P
2
max
–
P
2
)
k
6–4
+
+
P
2
max
–
P
2
+
P
3
–
P
3
max
+
P
4
–
P
4
max
.
(38)
Ограничения на пропускную способность в линиях
P
i
–
j
+
k
i
–
j
∆
P
2
(
z
2
) <
P
i
–
j
max
(39)
преобразуются к следующему виду:
F
2
k
1–2
z
2
<
P
1
m
–2
ax
–
P
1–2
–
k
1–2
(
P
2
–
P
2
max
),
(40)
F
2
k
1–3
z
2
<
P
1
m
–3
ax
–
P
1–3
–
k
1–3
(
P
2
–
P
2
max
),
(41)
F
2
k
1–5
z
2
<
P
1
m
–5
ax
–
P
1–5
–
k
1–5
(
P
2
–
P
2
max
),
(42)
F
2
k
2–4
z
2
<
P
2
m
–4
ax
–
P
2–4
–
k
2–4
(
P
2
–
P
2
max
),
(43)
F
2
k
3–4
z
2
<
P
3
m
–4
ax
–
P
3–4
–
k
3–4
(
P
2
–
P
2
max
),
(44)
F
2
k
6–4
z
2
<
P
6
m
–4
ax
–
P
6–4
–
k
6–4
(
P
2
–
P
2
max
).
(45)
Ограничения на параметры оптимизации:
0 ≤
z
i
≤1,
(46)
где
i
— номер узла (2, 3, 4, 6).
Ограничения вида (29) составляются по данным
таблицы 1.
Четвертый
шаг
.
Решение оптимизационной за-
дачи с учетом заданных ограничений, результатом
чего является вектор параметров оптимизации. По-
ставленная задача решается в среде Матлаб с ис-
пользованием функции linprog.
Пятый
шаг
.
Вычисление максимальных значе-
ний нагрузок в узлах 3, 4 и генерации в узлах 2, 6 по
формуле (6).
Шестой
шаг
.
Расчет установившегося режима
с полученными инъекциями. Исходным приближени-
ем напряжения являются значения модуля и фазы
напряжения в запланированном режиме, вычислен-
ные с помощью оценивания состояния.
Седьмой
шаг
.
Анализ полученного режима на
предмет существования данного режима. При отри-
цательном результате возможно выполнение ввода
режима в допустимую область.
Восьмой
шаг
.
Вычисление гибкости.
С
.
Анализ
результатов
.
Полученные результаты
сведены в таблице 2. В колонках 2, 5 расположены
значения активных мощностей, определенные в со-
ответствии с (6), где
z
— результат оптимизации.
В колонках 3,6 показана гибкость
F
S
(
i
)
. В предпо-
следней строке записана суммарная гибкость ЭЭС,
вычисленная по (13). В последней строке записана
суммарная гибкость ЭЭС, вычисленная в %. Для
проверки существования режима с инъекциями из
колонок 2, 5 рассчитывается УР (колонки 4, 7).
Анализ колонок 4 и 7 показывает, что УР1 и УР2
существуют (мощность в балансирующем узле не
превышает максимальную величину).
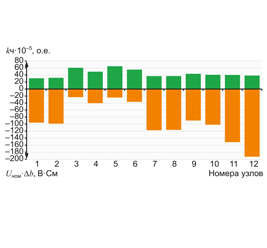
Значения максимальных мощностей (таблица 1,
колонка 2) и результаты оптимизации (таблица 2, ко-
лонки 2, 5) показаны на диаграмме рисунка 3.
Анализ результатов расчетов таблицы 2 и рисун-
ка 3 показывает, что:
Табл. 1. Исходная информация (МВт)
Номер
узла
P
max
P
min
УР1
УР2
1
2
3
4
5
1
14,6
14,6
2
32
23
23
23
3
–30
–26
–26
–26
4
–25
–16
–16
–16
5
0,0
6,7
6
10
–10
6,0
–0,4
Табл. 2. Результаты расчетов,
P
(МВт)
Номер
узла
УР1
УР2
P
i
calc
(
z
)
F
S
(
i
)
P
УР1
P
i
calc
(
z
)
F
S
(
i
)
P
УР2
1
2
3
4
5
6
7
1
14,6
14,6
2
29,5
29,5
29,5
29,5
3
–29,3
2,3
–29,3
–28,3
1,3
–28,3
4
–24,0
8,0
–24,0
–22,0
6,0
–22,0
5
7
0,3
6
9,8
7,5
6,5
9,9
F
S
10,3
7,3
F
S
(%)
26,1
18,5
№
3 (66) 2021
30
• Сравнение заданных максималь-
ных нагрузок (таблица 1, курсив)
с
максимально
возможными
нагрузками, (таблица 2, жирный
шрифт), демонстрирует: первое,
вычисленные нагрузки не превы-
шают максимальные значения;
второе, если взять за 100% вели-
чину нагрузок в запланированном
режиме, то с учетом заданных
ограничений максимальные откло-
нения нагрузок составляют 13,5%
и 50% в УР1 (10% и 37,5% в УР2)
в узлах 3 и 4 соответственно.
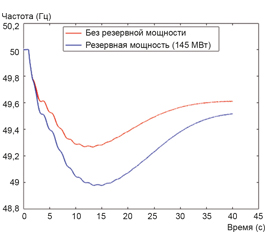
• Гибкость рассматриваемой сис-
темы без учета аварийных ситу-
аций равна 10,3 МВт (26,1%)
и 7,3 МВт (18,5%) для УР1 и УР2
соответственно. Это означает, что при выдаче
максимальной мощности батареей наибольшее
отклонение нагрузок при условии возможности
восстановления баланса равно 10,3 МВт; при
выдаче минимальной мощности батареей наи-
большее отклонение нагрузок равно 7,3 МВт. Учет
аварийных ситуаций, вызванных нормативными
возмущениями, в упрощенном виде может быть
реализован путем вычитания величины норма-
тивного объема резерва из полученных значений
гибкости.
• При расчете УР, где в качестве исходных данных
используются значения мощностей, вычислен-
ные в результате оптимизации, выявлено, что
существование режима возможно при условии
корректировки активной мощности в балансиру-
ющем узле и мощность, полученная в результате
корректировки, находится в заданных пределах.
ВЫВОДЫ
В статье представлен критерий оптимальности, в со-
ответствии с которым вычисляется режим с макси-
мальными отклонениями нагрузок от запланиро-
ванных величин, в задаче определения гибкости
электроэнергетической системы. Для вычисления
сочетания максимальных отклонений используется
линейная целевая функция.
Выполнен расчет гибкости 6-узловой схемы, кото-
рая включает ветровую электростанцию, аккумули-
рующую батарею, две нагрузки и две генерирующие
станции. Сравнительный анализ значений гибкости,
вычисленных для разных режимов, показывает, что
величина гибкости ЭЭС зависит от режима в рас-
сматриваемый момент времени. Это подтверждает
необходимость определения гибкости в режиме ре-
ального времени на некоторое время вперед.
Выполнен анализ результатов линейной оптими-
зации на предмет существования режима. Выявле-
но, что для обеспечения балансов мощности в ЭЭС
при полученных в процессе оптимизации значениях
инъекций в узлах с неопределенностью мощности
в балансирующем узле должны быть скорректиро-
ваны.
-40
-30
-20
-10
0
10
20
30
40
1
2
3
4
5
6
МВт
Номер узла
Максимальные значения
Результат оптимизации УР1
Результат оптимизации УР2
Рис
. 3.
Диаграмма
активных
мощностей
ЛИТЕРАТУРА / REFERENCES
1. Ela E., Milligan M., Kirby B. Operating Reserves and Vari-
able Generation. Technical Report NREL/TP-5500-51978.
Contract no. DE-AC36-08GO28308, 2011.
2. Mohandes B., Shawky El Moursi M., Hatziargyriou N.,
El Khatib S. A Review of Power System Flexibility With
High Penetration of Renewables. EEE Transactions on
Power Systems, 2019, vol. 34, no. 4, pp. 3140-3155.
3. Rebours Y., D.s. Kirschen, Trotignon M., Sbastien Rossi-
gnol C. A survey of frequency and voltage control ancillary
services. Part I: technical features. IEEE Transactions on
Power Systems, 2007, vol. 22, no. 1, pp. 350-357.
4. Методика определения минимально необходимых объ-
емов резервов активной мощности ЕЭС России. URL:
https://so-ups.ru/fileadmin/files/company/markets/2014/
metodika_opredelenija_1114.pdf.
Procedure of determining the minimum required active
power reserves of UES of Russia. URL: https://so-ups.
ru/fi leadmin/fi les/company/markets/2014/metodika_opre-
delenija_1114.pdf.
5. Стенников В.А., Барахтенко Е.А., Соколов Д.В., Шеле-
хова В.Б. Активное участие потребителя в управлении
своим энергоснабжением // Известия высших учебных
заведений. Проблемы энергетики, 2017, т. 19, № 11–12.
С. 88–100.
Stennikov B.A., Barakhtenko E.A., Sokolov D.V., She-
lekhova V.B. Active role of consumers in their demand
management //
Izvestiya vysshykh uchebnikh zavedeniy.
Problemi energetiki
[News of higher educational establish-
ments. Power industry issues], 2017, vol. 19, no. 11–12,
pp. 88–100. (In Russian)
6. Сидорович В., Бокарев Б., Чаусов И., Кулешов М.,
Рычков С., Бурдин И. Управление спросом в электро-
энергетике России: открывающиеся возможности.
Экспертно-аналитический доклад. Инфраструктур-
ный центр EnergyNet, Москва, 2019. URL: https://www.
so-ups.ru/fi leadmin/fi les/company/markets/dr/publication/
EnergyNet_2019.pdf.
Sidorovich V., Bokarev B., Chausov I., Kuleshov M., Rych-
kov S., Burdin I. Demand management in the power in-
Исследование выполнено за счет средств гранта Россий-
ского научного фонда (проект № 19-49-04108).
ВОЗОБНОВЛЯЕМАЯ
ЭНЕРГЕТИКА
31
dustry of Russia: opportunities. Expert-analytical report.
Infrastructural center EnergyNet, Moscow, 2019. URL:
https://www.so-ups.ru/fi leadmin/fi les/company/markets/dr/
publication/EnergyNet_2019.pdf.
7. Gottwalt S., Gärttner J., Schmeck H., Weinhardt C. Model-
ing and Valuation of Residential Demand Flexibility for Re-
newable Energy Integration. IEEE Transactions on Smart
Grid, 2016, vol. 8, no. 6, pp. 2565-2574.
8. Moradijoz M., Parsa Moghaddam M., Haghifam M.-R.
A Flexible Distribution System Expansion Planning mod-
el: dynamic bi level approach. IEEE Transactions on
Smart Grid, 2017. URL: https://www.researchgate.net/
publication/322205957_A_Flexible_Active_Distribution_
System_Expansion_Planning_Model_A_Risk-Based_Ap-
proach.
9. Gils H.Ch. Assessment of the theoretical demand response
potential in Europe. Energy, Elsevier, 2014, vol. 67, no. C,
pp. 1-18.
10. Накопители энергии. ИЦ «Автоматизация ресурсосбе-
регающих технологий». URL: http://www.ic-art.ru/kom –
pensatsiya-nagruzok-bespereboynoe-pitanie/setevie_
preobrazovateli/.
Energy storage units. Engineering Center ART. URL: http://
www.ic-art.ru/kompensatsiya-nagruzok-bespereboynoe-
pitanie/setevie_preobrazovateli/.
11. Суперпроводящий магнитный накопитель энергии. URL:
http://ru.knowledgr.com/00019040.
Superconductive magnetic energy storage. URL: http://ru.
knowledgr.com/00019040.
12. Bell K.R.W., Nedic D.P., Martin L.A.S.S. The need for in-
terconnection reserve in a system with wind generation.
IIEEE Transactions on Sustainable Energy, 2012, vol. 3,
no. 4, pp. 703-712.
13. Chicco G., Riaz Sh., Mazza A., Mancarella P. Flexibility
From Distributed Multienergy Systems. Proceedings of the
IEEE, 2020, vol. 108, no. 9, pp. 1496-1517.
14. Zhao J., Zheng, T., Litvinov E. A unifi ed framework for defi n-
ing and measuring fl exibility in power system. IEEE Trans-
actions on power systems, 2016, vol. 31, no. 1, pp. 339-
347.
15. Zhao L., Zhang W., Hao H., Kalsi K. A Geometric Approach
to Aggregate FlexibilityModeling of Thermostatically Con-
trolled Loads. IEEE Transactions on power systems, 2017,
vol. 32, no. 6, pp. 4721-4731.
16. Lannoye E., Flynn D., O’Malley M. Evaluation of Power
System Flexibility. IEEE Transactions on Power Systems,
2012, vol. 27, no. 2, pp. 922-931.
17. Krommydas K.F., Stratigakos A.C., Dikaiakos C., Papaioan-
nou G.P., Zafi ropoulos E.,. Ekonomou L. An Improved Flex-
ibility Metric Based on Kernel Density Estimators Applied
on the Greek Power System. International Symposium on
High Voltage Engineering, Budapest, Hungary, 2019. URL:
https://www.researchgate.net/publication/336921977.
18. Förderer K., Ahrens M., Bao K., Mauser I., Hartmut Sch-
meck H. Modeling fl exibility using artifi cial neural networks.
Proceedings of the 7th DACH+ Conference on Energy In-
formatics, 10 October 2018. URL: https://www.research-
gate.net/publication/328192598.
19. Ronellenfi tsch H., Timme M., Witthaut D. A Dual Method
for Computing Power transfer Distribution Factors. IEEE
Transactions on Power Systems, 2015, vol. 32, no. 2. URL:
https://www.researchgate.net/publication/282905950.
Ïðåîáðàçîâàòåëè
èçìåðèòåëüíûå
íàïðÿæåíèÿ ÏÈÍ
îò 50 Â äî 3000 Â
Âûñîêîâîëüòíûå
ýëåêòðîííûå
êëåùè ÊÒ-1000-Â
äëÿ èçìåðåíèÿ òîêà
äî 1000 À ïðè
íàïðÿæåíèè íà
òîêîâîé øèíå
äî 10 000 Â
Ïðåîáðàçîâàòåëè èçìåðèòåëüíûå
ìîùíîñòè ñåðèè ÏÈÌ
äëÿ êîíòðîëÿ àêòèâíîé ìîùíîñòè
â äèàïàçîíå îò 1 äî 4000 êÂò
Ïðåîáðàçîâàòåëè èçìåðèòåëüíûå
òîêà ñåðèè ÏÈÒ äëÿ èçìåðåíèÿ òîêà
îò 40 ìÀ äî 25 000 À
Преобразователи
(
датчики
)
для
энергетиков
от
ООО
«
НПО
«
Горизонт
Плюс
»
j%
ä
C=…,
nnn
&mon
&c%!,ƒ%…2
o
ãĊ
“[
(
Ą
.
h“2!=
,
l%“*%”“*%L
%K
ã
.)
C!
Ëąã
=
Ą
=
Ë
2
C!,K%!/
“%K“2″
Ë
……%L
!=ƒ!=K%2*,
ąã
,ƒ
äË
!
Ë
…,
2%*=
,
…=C! ›
Ë
…,
,
=*2,”…%L
ä
%?…%“2,.
o!
Ë
%K!=ƒ%”=2
Ëã
,
“
Ë
!2,-,
Ć
,!%”=…/
,
“…
Ë
“
Ë
…/
“
c%“!
ËË
“2!
qh
pt
,
C!
Ëą
“2=”
ã
Ċ
2
ą
%“2%L…3
Ċ
ƒ=
äË
…3
,
ä
C%!2…/
ä
=…=
ã
%
Ą
=
ä
C%
“%%2…%
ĈË
…,
Ċ
ĆË
…=
/
*=
ćË
“2″%.
j%
ä
C=…,
nnn
&mon
&c%!,ƒ%…2
o
ãĊ
“[
%“3?
Ë
“2″
ã
Ë
2
K
Ë
“C
ã
=2…3
Ċ
ą
%“2=”*3
C!
Ë
%K!=ƒ%”=2
ËãË
L
“%
““
Ë
!
ËĄ
,%…/
pt
,
“
“2!=…/
qmc.
+7
9
2
9
9
2
4
79
2
7
,
+7
9
2
9
9
2
4
87
89
www.g
o
riz
ont-pl
us.ru
o!
Ë
%K!=ƒ%”=2
Ëã
,
(
ą
=2
ć
,*,)
%K
Ë
“C
Ëć
,”=
Ċ
2
Ą
=
ãĉ
“=…,
ćË
“*3
Ċ
,ƒ%
ã
Ć
,
Ċ
“
.
%
ą
…/
.
,
“/
.
%
ą
…/
.
ĆË
C
Ë
L
,
3
ą
%K…/L
“/
.
%
ą
…%L
,…2
Ë
!-
Ë
L“
0$
2
0
ä
`
(4$
2
0
ä
`).
www.g
o
riz
ont-pl
us.ru
На прав
ах рек
ламы
№
3 (66) 2021
Оригинал статьи: Оценка гибкости электроэнергетической системы с ветровыми станциями и накопителями энергии в режиме реального времени
Традиционно основную роль в поддержании баланса мощности и энергии в ЭЭС выполняют электростанции. В современных условиях развития электроэнергетики появился новый востребованный инструмент регулирования баланса спроса и предложения на рынках электроэнергии — управление спросом на электроэнергию (от англ. Demand Response — DR). На основе материалов из доступных источников в статье анализируются критерии отбора участников в структуру агрегатора спроса в рамках пилотного проекта «Агрегатор спроса». Предлагается рассматривать процесс отбора как с учетом требований со стороны агрегатора к надежности функционирования участников, так и с учетом возможностей самих участников, рассматриваемых в статье с позиций киберфизической системы.