Оригинал статьи: Модель подстанции для испытаний цифровой системы управления
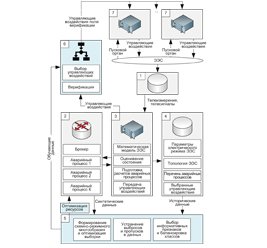
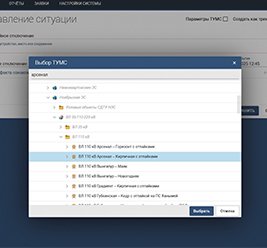
Статья посвящена созданию модели первичного оборудования действующей подстанции «Калининская» 220/110/10 кВ на базе ПК Matlab/Simulink для испытаний цифровой системы управления. Созданная модель позволяет имитировать различные режимы работы фрагмента энергосистемы. Также модель адаптирована для запуска на программно-аппаратном комплексе реального времени (ПАК РВ). ПАК РВ позволяет преобразовывать цифровой сигнал в аналоговый, соответствующий вторичным цепям трансформаторов тока (ТТ) и трансформаторов напряжения (ТН). Кроме того, комплекс предоставляет возможность передачи данных в соответствии со стандартом МЭК 61850 (GOOSE, SV). Тем самым можно имитировать функционирование цифровой подстанции при подключении реальных устройств, проверить и исследовать функционирование системы управления подстанции как при передаче данных по цифровым протоколам МЭК 61850 с шиной процесса и шиной станции, так и по аналоговым сигналам.