
120
В
иртуальная
реальность
—
способ
модели
-
рования
объектов
,
процессов
и
явлений
,
который
позволяет
ощутить
присутствие
на
объекте
моделирования
.
Виртуальная
ре
-
альность
заменяет
для
пользователя
реальность
,
тем
самым
позволяя
организовать
для
него
различ
-
ные
среды
взаимодействия
с
объектами
,
в
том
чис
-
ле
в
тренировочных
целях
[1–4],
при
этом
полностью
устраняя
какие
-
либо
реальные
опасные
воздей
-
ствия
,
например
,
поражение
электрическим
током
.
Важным
аспектом
ощущения
присутствия
,
то
есть
погружения
в
виртуальную
модель
,
является
воз
-
можность
естественного
перемещения
,
другими
сло
-
вами
,
естественной
локомоции
.
В
данной
статье
продемонстрировано
разраба
-
тываемое
решение
для
максимального
погружения
человека
в
виртуальную
реальность
посредством
использования
всенаправленной
дорожки
с
допол
-
нительной
вертикальной
степенью
свободы
.
Всена
-
правленная
дорожка
—
это
устройство
,
позволяю
-
щее
производить
пешее
перемещение
в
виртуальной
реальности
,
выполняя
естественные
движения
нога
-
ми
и
телом
,
существенно
не
смещаясь
в
реальном
мире
.
Существующие
на
данный
момент
всенаправ
-
ленные
дорожки
ограничены
ходьбой
,
иногда
бегом
,
прыжок
/
падение
на
них
имеет
очень
ограниченную
реализацию
,
а
на
большей
их
части
прыгать
вовсе
нельзя
.
Этот
факт
ограничивает
применение
вирту
-
альной
реальности
для
тренажеров
,
осуществляю
-
щих
тренировку
по
тем
видам
работ
,
которые
под
-
разумевают
вертикальное
перемещение
,
например
работы
на
высоте
.
В
предлагаемом
решении
задача
вертикального
перемещения
решена
.
Более
того
,
это
перемещение
безопасно
,
полностью
контролиру
-
емо
,
а
главное
,
есть
еще
одна
инновационная
функ
-
ция
обезвешивания
,
которая
позволяет
реализовать
эффект
снижения
гравитационного
воздействия
на
пользователя
на
уровне
нагрузки
(
мышц
),
создание
контролируемого
падения
.
Разрабатываемая
дорожка
имеет
конкретную
цель
:
расширить
решаемые
конкурентами
задачи
путем
добавления
новой
функциональности
—
ак
-
тивного
обезвешивания
пользователя
,
дающего
до
-
полнительную
вертикальную
степень
свободы
.
Это
позволить
создавать
тренажеры
виртуальной
реаль
-
ности
с
возможностью
проведения
тренировок
вер
-
холазных
работ
.
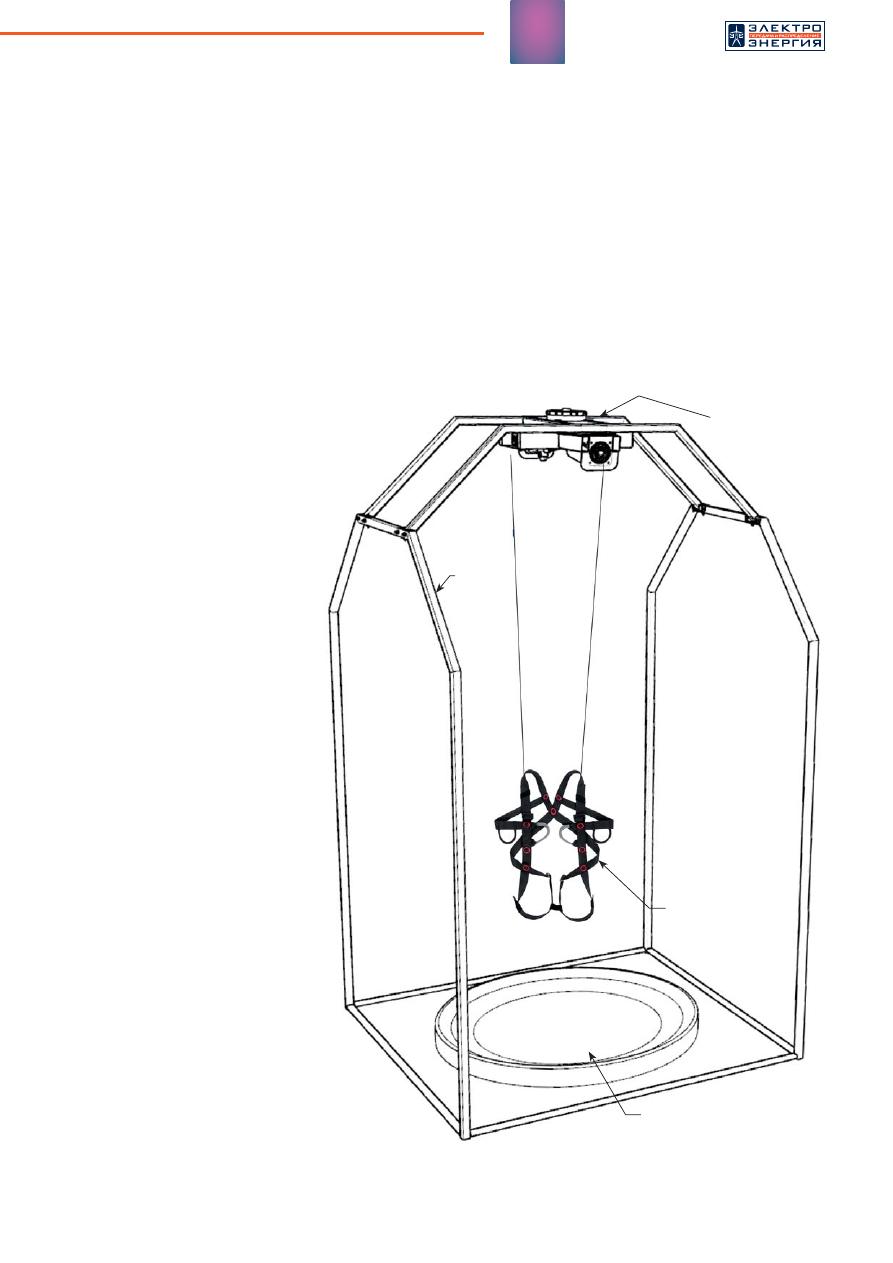
Схема
всенаправленной
дорожки
представлена
на
рисунке
1.
Ключевым
элементом
,
отличающим
представленное
решение
от
аналогов
,
является
ак
-
тивная
система
обезвешивания
(
активный
подвес
)
пользователя
специальной
конструкции
.
Управление
подвесом
осуществляется
сервоприводами
с
кон
-
троллерами
.
Общий
принцип
работы
такого
подвеса
можно
опи
-
сать
так
:
мы
контролируем
не
только
направление
и
ско
-
рость
движения
пользователя
,
но
контролируем
также
вертикальное
положение
тела
пользователя
.
Есть
две
задачи
,
в
которых
такой
контроль
дает
нужный
эффект
и
решает
их
полностью
.
ЗАДАЧА
ИМИТАЦИИ
ПРАВИЛЬНОЙ
ЛОКОМОЦИИ
ПОЛЬЗОВАТЕЛЯ
НА
ПАССИВНОЙ
ДОРОЖКЕ
Пассивная
дорожка
не
предполагает
перемещение
поверхности
под
пользователем
,
пользователь
дол
-
жен
самостоятельно
двигать
ногами
,
как
при
ходьбе
на
месте
.
Уникальная
система
разгрузки
позволя
-
ет
решить
проблему
неправильной
работы
мышц
при
имитации
ходьбы
на
пассивной
дорожке
.
Про
-
стой
кинематический
анализ
ходьбы
человека
по
-
казывает
[5–6],
что
есть
всего
две
фазы
для
каж
-
дой
ноги
:
фаза
опоры
и
фаза
переноса
.
Разберем
каждую
фазу
с
точки
зрения
имитации
и
нагрузки
на
мышцы
.
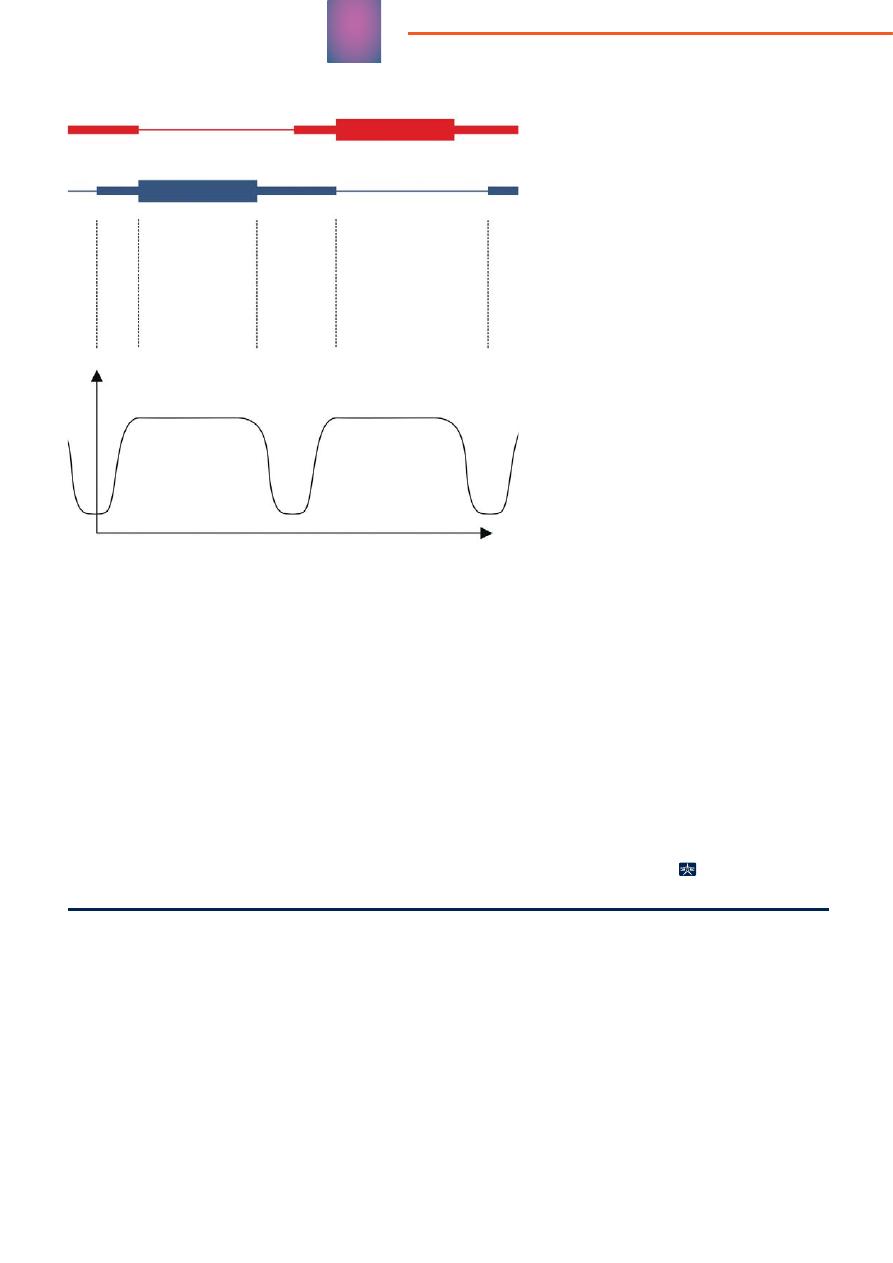
За
точку
отсчета
примем
момент
времени
опо
-
ры
на
пятку
.
В
этот
момент
имитация
через
раз
-
грузку
начинает
нарастать
,
необходимо
запустить
обратный
механизм
скольжения
,
который
вернет
Инновационное решение
для естественной локомоции
в виртуальной реальности
Кафедре
электроэнергетических
систем
Национального
исследовательского
универси
-
тета
«
МЭИ
»
в
2022
году
исполняется
90
лет
.
В
честь
нашего
юбилея
мы
публикуем
статьи
о
результатах
наших
исследований
.
Данная
статья
является
одной
из
них
.
Насыров
Р
.
Р
.,
к
.
т
.
н
.,
доцент
кафедры
Электроэнергетических
систем
ФГБОУ
ВО
«
НИУ
«
МЭИ
»
ОХРАНА ТРУДА
121
ногу
.
Именно
в
этот
момент
начнется
перенос
веса
с
одной
ноги
на
другую
.
Следующий
момент
време
-
ни
—
опора
на
всю
стопу
.
В
этот
момент
разгрузка
максимальная
,
так
как
происходит
перенос
другой
ноги
,
и
пользователю
можно
помочь
и
снять
реак
-
цию
опоры
.
Далее
—
опора
на
передний
отдел
сто
-
пы
.
В
этот
момент
пользователь
начинает
падать
,
ожидая
опору
на
пятку
на
другой
ноге
.
В
этот
мо
-
мент
нужно
дать
ему
почувствовать
свой
вес
,
дать
отработать
мышцам
.
Как
только
опора
сработала
,
мы
его
тут
же
разгружаем
.
И
происходит
фаза
пере
-
носа
.
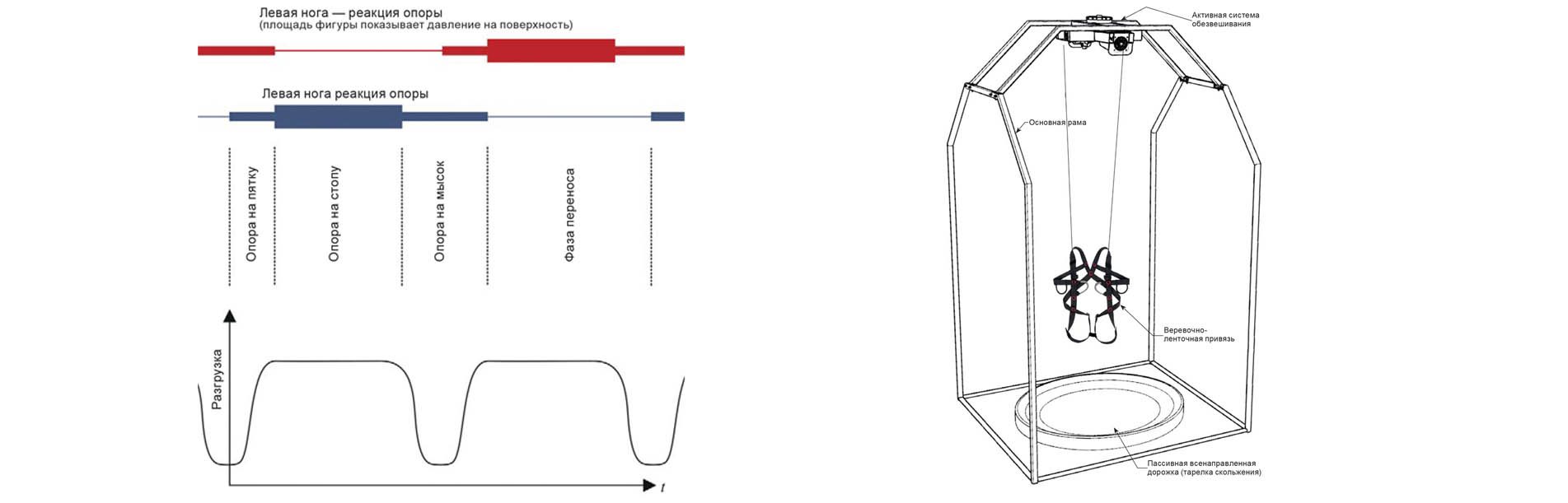
Разгрузочно
-
фазовая
диаграмма
при
горизон
-
тальной
локомоции
человека
представлена
на
ри
-
сунке
2.
Другими
словами
,
для
каждой
ноги
мы
чувствуем
разгрузку
два
раза
,
в
фазе
переноса
и
в
фазе
опоры
на
всю
стопу
.
Это
упрощает
оба
действия
с
точки
зрения
нагрузки
на
опорно
-
двигательный
аппарат
,
что
позволяет
ходить
часами
без
заметной
усталости
,
но
при
этом
полностью
получать
всю
мышеч
-
ную
реакцию
.
Исходя
из
этого
представления
можно
понять
,
что
90%
време
-
ни
человек
находится
в
разгруз
-
ке
,
которая
активно
управляется
контроллерами
.
В
зависимости
от
подготовленности
пользовате
-
ля
она
выставляется
на
уровне
0,7–0,15g.
В
моменте
падения
,
когда
опорная
нога
переходит
из
фазы
опоры
на
всю
стопу
в
фазу
опоры
на
передний
отдел
стопы
,
разгрузка
снижается
до
0,9–0,5g.
Полностью
она
не
отключается
для
контроля
поддержки
,
чтобы
пользователь
,
в
случае
если
он
оступился
,
не
упал
и
не
травмиро
-
вался
.
Фазы
ходьбы
определяются
программно
-
аппаратными
мето
-
дами
.
В
настоящий
момент
есть
два
способа
,
которые
мы
приме
-
няем
.
Это
визуальное
распозна
-
вание
скелета
с
помощью
каме
-
ры
,
и
система
датчиков
на
основе
MEMS-
сенсоров
,
регистрирую
-
щих
перемещение
пользователя
в
пространстве
.
Эффект
от
такой
имитации
за
-
ключается
в
том
,
что
пользовате
-
лю
удается
больше
времени
про
-
водить
в
виртуальной
реальности
за
счет
разгрузки
до
0,7–0,15g.
При
перемещении
в
горизонталь
-
ной
плоскости
(
ходьба
/
бег
)
до
указанной
разгрузки
происходит
облегчение
локомоции
пользо
-
вателя
,
что
приводит
к
снижению
нагрузки
на
опорно
-
двигательный
аппарат
пользователя
.
В
результате
существен
-
но
снижается
уровень
утомляемости
пользователя
при
выполнении
длительных
работ
при
сохранении
функции
наработки
навыков
.
ЗАДАЧА
ИМИТАЦИИ
РАБОТЫ
ПОЛЬЗОВАТЕЛЯ
НА
ВЫСОТЕ
В
этом
режиме
разгрузка
используется
как
страхо
-
вочный
механизм
при
работах
на
высоте
.
К
работам
на
высоте
относятся
работы
,
при
которых
,
в
частности
,
существуют
риски
,
связанные
с
возможным
падением
работника
с
высоты
до
и
более
1,8
м
в
зави
-
симости
от
условий
[7].
В
соответствии
с
[7],
предусма
-
триваются
системы
обеспечения
безопасности
работ
на
высоте
и
соответствующие
схемы
их
применения
.
В
со
-
став
систем
обеспечения
безопасности
входят
:
Рис
. 1.
Схема
всенаправленной
дорожки
с
системой
активной
разгрузки
пользователя
Активная
система
обезвешивания
Пассивная
всенаправленная
дорожка
(
тарелка
скольжения
)
Основная
рама
Веревочно
-
ленточная
привязь
№
2 (71) 2022
122
ленная
дорожка
с
функцией
активного
обезвешивания
пользователя
способна
позволить
пользователю
выполнять
дан
-
ные
виды
работ
в
виртуальной
реаль
-
ности
.
Причем
наличие
возможности
контролируемого
безопасного
падения
позволит
отрабатывать
как
штатные
,
так
и
нештатные
ситуации
с
возможностью
падения
.
Такой
набор
возможностей
,
как
ими
-
тация
работ
на
высоте
с
функцией
без
-
опасного
,
но
ощутимого
падения
,
а
также
полноценной
ходьбы
без
усталости
,
дает
ощутимый
положительный
эффект
при
применении
данного
устрой
ства
в
тре
-
нажерах
виртуальной
реальности
,
в
том
числе
и
для
оперативного
персонала
.
Реализация
всенаправленной
дорож
-
ки
с
дополнительной
степенью
свободы
снимет
ограничения
для
тренажеров
вир
-
туальной
реальности
,
связанных
с
вы
-
полнением
работ
,
требующих
подъемов
и
спусков
,
а
также
даст
возможность
до
-
пускать
ошибки
,
приводящие
к
падению
.
ВЫВОДЫ
Тренажеры
виртуальной
реальности
неизбежно
входят
в
современную
дей
-
ствительность
.
Если
программная
со
-
ставляющая
виртуальной
реальности
проработана
на
высоком
уровне
,
то
интеграция
человека
в
эту
ре
-
альность
ограничена
аппаратной
частью
.
Всенаправленная
беговая
дорожка
с
системой
обезвешивания
пользователя
—
это
возможное
ре
-
шение
,
предназначенное
для
перемещения
пользо
-
вателя
в
виртуальном
мире
,
то
есть
управление
ло
-
комоцией
(
ходьбой
,
поворотами
,
бегом
,
прыжками
,
падением
)
естественными
для
пользователя
свобод
-
ными
действиями
внутри
виртуальной
реальности
.
Использование
показанной
системы
активной
разгрузки
позволит
строить
аппаратные
решения
,
в
том
числе
для
тренажеров
,
которые
делают
до
-
ступными
не
только
перемещения
в
горизонтальной
,
но
и
вертикальной
плоскостях
.
ЛИТЕРАТУРА
1.
Насыров
Р
.
Р
.,
Сулейманов
И
.
Р
.,
Чур
-
кин
А
.
В
.,
Пилюгин
А
.
В
.,
Марченков
Д
.
В
.
Виртуальный
тренажер
опера
-
тивных
переключений
//
Электриче
-
ство
, 2016,
№
3.
С
. 27–33.
2.
Насыров
Р
.
Р
.,
Сулейманов
И
.
Р
.
Тре
-
нажер
оперативного
и
эксплуатаци
-
онного
персонала
на
основе
модели
виртуальной
реальности
трансфор
-
маторной
подстанции
/
Сб
.
трудов
IV
Всероссийской
научно
-
техни
-
ческой
конференции
студентов
,
магистров
,
аспирантов
«
Энергоэф
-
фективность
и
энергобезопасность
производственных
процессов
».
То
-
льятти
, 12–14
апреля
2016
г
.
Тольят
-
ти
:
Изд
-
во
ТГУ
, 2016. 415
с
.
3. Nasyrov R.R., Excell P.S. New
Approaches to Training of Power
Substation Operators Based on
Interactive Virtual Reality, Springer
Nature Switzerland AG 2018 V. Pam-
mer-Schindler et al. (Eds.): EC-TEL
2018, LNCS 11082, pp. 551–555.
URL: https://doi.org/10.1007/978-3-
319-98572-5_43.
4. Nasyrov R.R., Excell P.S. Creation of
Interactive Virtual Reality Scenarios
as a Training and Education Tool.
URL: https://link.springer.com/chapt
er/10.1007/978-3-030-42097-0_19.
5.
Гранит
Р
.
Основы
регуляции
дви
-
жений
.
М
.:
Мир
, 1973. 278
с
.
6.
Богданов
В
.
А
.,
Фельдман
А
.
Г
.,
Пер
-
сон
Р
.
С
.
Физиология
движений
.
Л
.:
Наука
.
Ленинградское
отделение
,
1976. 376
с
.
7.
Приказ
об
утверждении
Пра
-
вил
по
охране
труда
при
работе
на
высоте
от
16
ноября
2020
г
.
№
782
н
.
ГКДЖ
https://docs.cntd.ru/
document/573114692.
1)
анкерное
устройство
;
2)
привязи
(
страховочная
,
для
удержания
,
для
пози
-
ционирования
,
для
работ
в
положении
сидя
,
спа
-
сательная
);
3)
соединительные
подсистемы
(
строп
,
канат
,
кара
-
бин
,
амортизатор
или
устройство
,
функционально
его
заменяющее
,
средство
защиты
втягивающего
типа
,
средство
защиты
от
падения
ползункового
типа
на
гибкой
или
на
жесткой
анкерной
линии
,
устройство
для
позиционирования
на
канатах
).
Должное
применение
указанных
систем
обеспе
-
чения
безопасности
является
гарантией
надежного
позиционирования
работника
на
высоте
.
Тренажерная
подготовка
в
виртуальной
реально
-
сти
для
подобных
видов
работ
на
данный
момент
ни
-
как
не
представлена
.
Рассматриваемая
всенаправ
-
Левая
нога
—
реакция
опоры
(
площадь
фигуры
показывает
давление
на
поверхность
)
Левая
нога
реакция
опоры
Ра
зг
ру
зк
а
Оп
ора
на
пятк
у
Оп
ора
на
ст
о
п
у
Оп
ора
на
мыс
о
к
Фаз
а
перенос
а
t
Рис
. 2.
Разгрузочно
-
фазовая
диаграмма
при
горизонтальной
локомо
-
ции
человека
ОХРАНА ТРУДА
Оригинал статьи: Инновационное решение для естественной локомоции в виртуальной реальности
Кафедре электроэнергетических систем Национального исследовательского университета «МЭИ» в 2022 году исполняется 90 лет. В честь юбилея публикуются статьи о результатах исследований. Данная статья является одной из них.