Оригинал статьи: Элементы телеуправления во вторичных цепях устройств релейной защиты и электроавтоматики
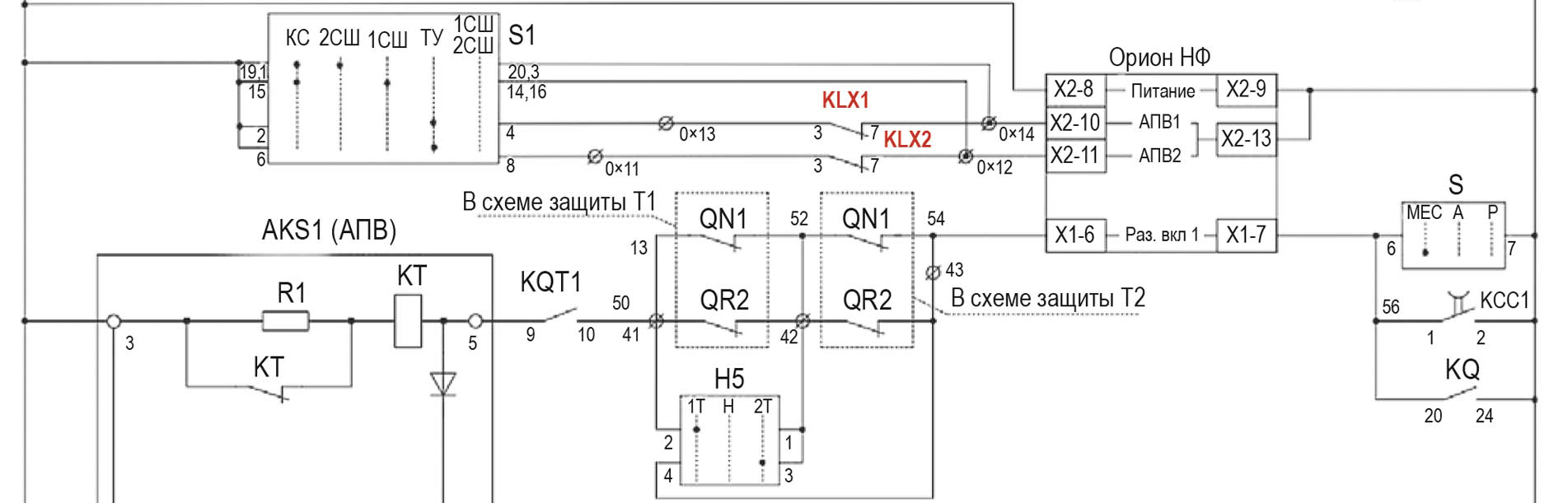
Рассмотрена проблема оперативных переключений во вторичных цепях электромеханических устройств релейной защиты. Приведены примеры реализации телеуправления на основе электромеханических реле и микропроцессорных устройств, их достоинства и недостатки. Предложено устройство сопряжения вторичной коммутации, рассмотрен алгоритм его работы, приведены технические требования. Рассмотрен вопрос организации каналов передачи данных и команд телеуправления между устройством сопряжения и верхним уровнем.