










В статье рассматривается опыт успешного внедрения и эксплуатации программного комплекса «Электронный оперативный журнал» на базе платформы CK-11 в АО «Россети…

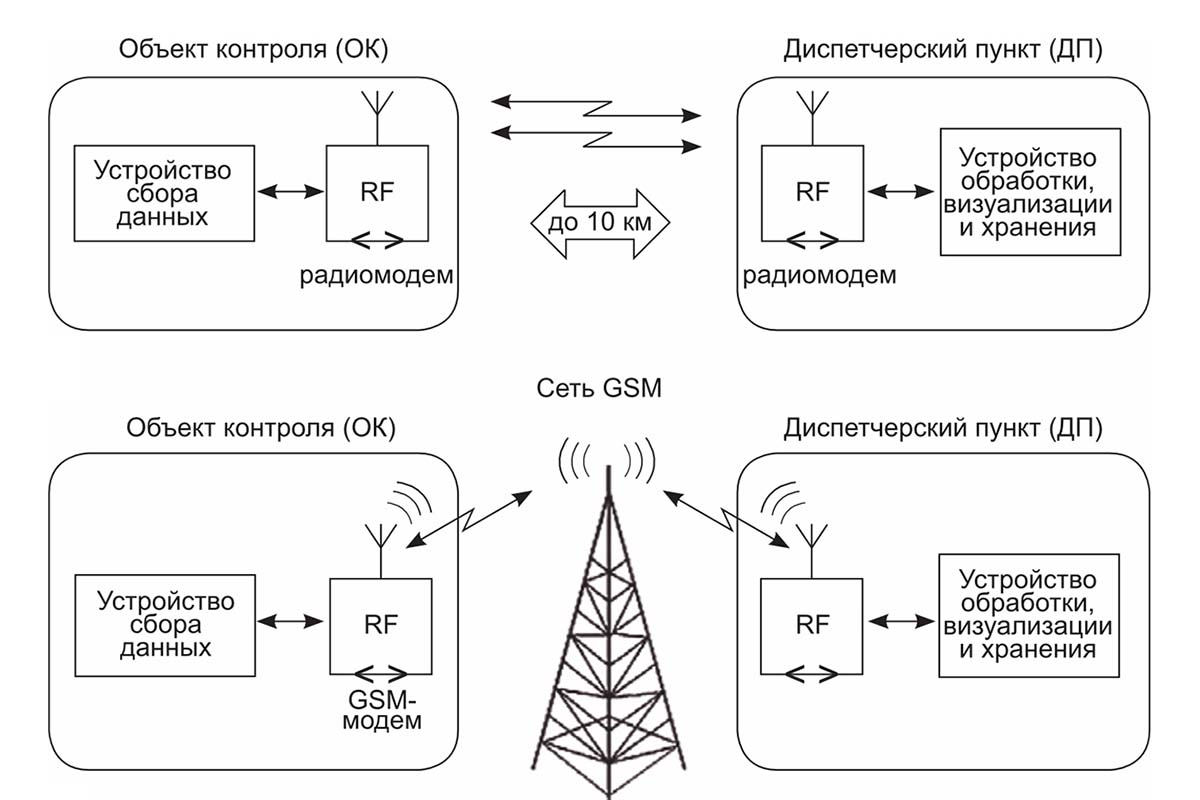
Технологии искусственного интеллекта (ИИ) в системах акустического мониторинга позволяют бесконтактно анализировать оборудование без остановки производства. Российские…
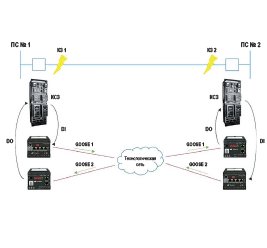
Рассмотрен способ ускорения ликвидации коротких замыканий на ВЛ 110 кВ с двухсторонним питанием. В качестве устройств релейной защиты…
Партнеры

















90 лет на передовой энергосистемы: Новосибирское РДУ отмечает юбилей оперативно-диспетчерской службы
Филиал АО «СО ЕЭС» Новосибирское РДУ отмечает 90-летие со дня создания оперативно-диспетчерской службы в энергосистеме Новосибирской области. Эта дата ведет отсчет с 9 февраля…

13 января в нашей стране отмечается профессиональный праздник всех, чья деятельность связана с печатным словом. Эта дата была утверждена в качестве Дня печати в последний год…

Дорогие друзья, уважаемые коллеги! От всей души поздравляем вас с наступающим Новым годом и Рождеством! Уверены, 2026 год станет для всех нас удачным и плодотворным, поставит новые вызовы,…